



1
Chapter 5
Sinusoidal Input
Docsity.com




























Study with the several resources on Docsity

Earn points by helping other students or get them with a premium plan

Prepare for your exams
Study with the several resources on Docsity
Earn points to download
Earn points by helping other students or get them with a premium plan
This lecture is from Process Control course. Some key points for this lecture are: Sinusoidal Input, Approximated, Subject, Processes, Disturbances, Variations, Cooling, Water Temperature, Electrical Noise, Output
Typology: Slides
1 / 44

This page cannot be seen from the preview
Don't miss anything!
1
Sinusoidal Input
2
Examples:
Processes are also subject to periodic, or cyclic, disturbances. They can be approximated by a sinusoidal disturbance:
( ) ( )
sin
A ω t t
where: A = amplitude, ω = angular frequency
ω ω
4
( )
(^2 2 2 )
2 2
2 2
( ) sin( ) (^1 )
sin( ) sin( ) 1 where
amplitude ratio 1 arctan( ) phase angle
y t AK^ e t AK t
y AK t B t
B K A
ωτ τ ω φ ω τ ω τ
ω φ ω φ ω τ
ω τ φ ωτ
= − + +
∞ + = +
= =
= − =
Note that the amplitude ratio and phase angle is not a function of t but of τ and ω. For large t, y(t) is also sinusoidal, output sine is attenuated by…
Inverting, (^) this term dies out for large t
1
1 ω^2 τ^2 +
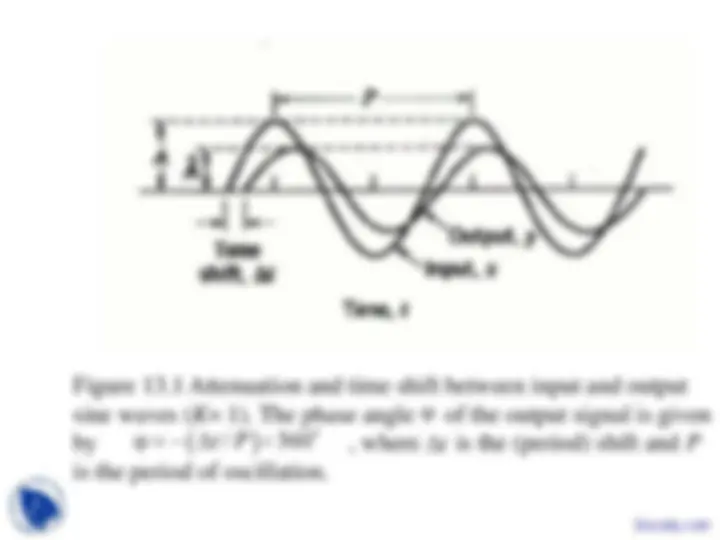
Figure 13.1 Attenuation and time shift between input and output sine waves ( K = 1). The phase angle of the output signal is given by , where is the (period) shift and P is the period of oscillation.
φ
which can, in turn, be divided by the process gain to yield the normalized amplitude ratio (AR (^) N ) (or magnitude ratio):
ω τ 1
Dividing both sides by the input signal amplitude A yields the amplitude ratio (AR)
2 2
ω τ 1
( ) 2 tan^1
t P
8
Basic Theorem of Frequency
Response
( ) ( )
s j
ω
ω
Step 1. Set s=j ω in G ( s ) to obtain. Step 2. Rationalize G ( j ω); We want to express it in the form. G ( j ω)= R + jI where R and I are functions of ω. Simplify G ( j ω) by multiplying the numerator and denominator by the complex conjugate of the denominator. Step 3. The amplitude ratio and phase angle of G(s) are given by:
2 2 1
tan ( / )
Find the frequency response of a first-order system, with
τ 1
G s s
Solution
First, substitute s = j ω in the transfer function
ω (13-17) τ ω 1 ωτ 1
G j j j
Then multiply both numerator and denominator by the complex conjugate of the denominator, that is, −^ j ωτ^ +^1
2 2
2 2 2 2
ωτ 1 ωτ 1 ω ωτ 1 ωτ (^1) ω τ 1 1 ωτ (13-18) ω τ 1 ω τ 1
j j G j j j
j R jI
Consider a complex transfer G ( s ),
ω ω ω ω (13-23) ω ω ω
G j G^ a^ j^ Gb^ j^ Gc^ j G j G j G j
From complex variable theory, we can express the magnitude and
ω ω ω ω (13-24a) ω ω ω
G j G^ a^ j^ Gb^ j^ Gc^ j G j G j G j
ω ω ω ω [ω ω ω ] (13-24b)
G j G a j Gb j Gc j G j G j G j
G s G^ a^ s Gb^ s Gc^ s G s G s G s Substitute s=j ω,
14
Transfer Functions in Series
( ) ( ) ( )^ ( )
( )
1
1
1
1 1
1 1
1
1
ln ln
ln ln
n i (^) i i
n i i
n i i G j n^ G j n^ G^ j i i^ i i n n i i^ i i
n i i n i i
Y s (^) G s G s X s s j G j G j
G j e G j e G j e
G j j G j G j j G j
G j G j
G j G j
ω ω^ ω
ω ω ω
ω ω ω
ω ω ω ω
ω ω
ω ω
=
=
= ∠ ∠ ∠ = =
= =
=
=
=
∑ = =
∠ = ∠
∏
∏
∏ ∏
∏ ∑
∑
∑
16
Bode Diagrams
17
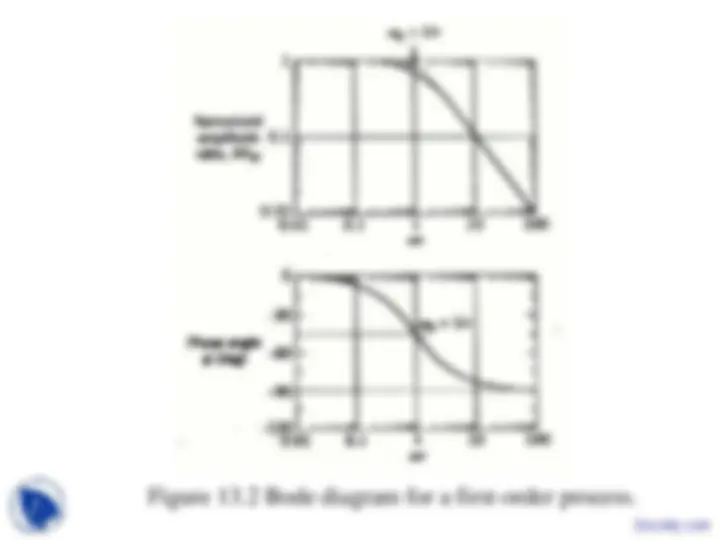
Bode Plot of A First-order System
( )
Recall:
1 AR φ tan ωτand ω τ 1
ω 0 and ω 1) :
AR 1 and
ω 0 and ω 1) :
ωτ and AR 1/
= = −^ −
= ϕ = 0
= ϕ = −
At low frequencies (
At high frequencies (
ω = ω (^) b =1/ τ
ARω ω 0.707 (13-30) b 1 1
20
2 2
1
ARω ω τ 1
φ ω tan − ωτ
G j K
G j
Substituting s=j ω gives
Consider a process zero term,
Thus:
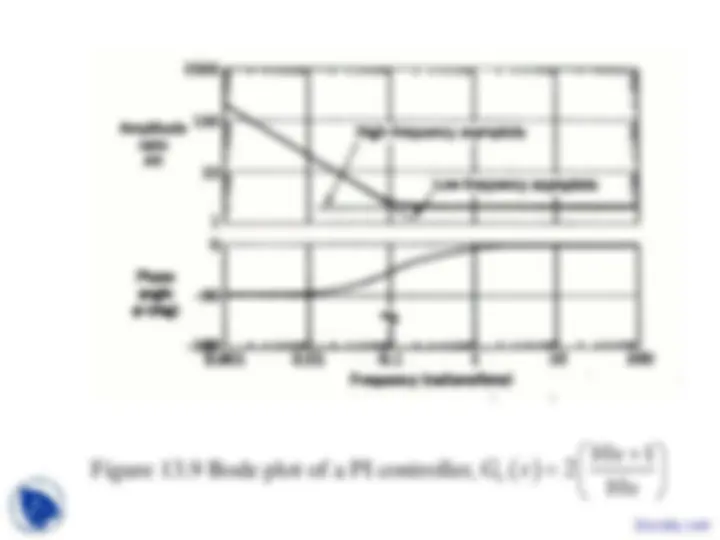
Note : In general, a multiplicative constant (e.g., K ) changes the AR by a factor of K without affecting φ.