



Introduction to Process Control
Chapter One
Docsity.com















Study with the several resources on Docsity

Earn points by helping other students or get them with a premium plan

Prepare for your exams
Study with the several resources on Docsity
Earn points to download
Earn points by helping other students or get them with a premium plan
This lecture is from Process Control course. Some key points for this lecture are: Introduction, Process Control, Controller, Element, Process, Sensor, Control Terminology, Controlled Variables, Manipulated Variables, Disturbances
Typology: Slides
1 / 28

This page cannot be seen from the preview
Don't miss anything!
Controlled Variables - These are the variables which quantify the performance or quality of the final product, which are also called output variables.
Manipulated Variables - These input variables are adjusted dynamically to keep the controlled variables at their set-points.
Disturbances - These are also called the “load” variables and represent inputs that can cause the controlled variables to deviate from their respective set points.
Servo control - The set-point signal is changed and the manipulated variable is adjusted appropriately to achieve the new operating conditions.
Regulatory control – The set-point is fixed at a constant value. When any disturbance enters the system, the manipulated variable is adjusted to drive the controlled variable back to its fixed set-point.
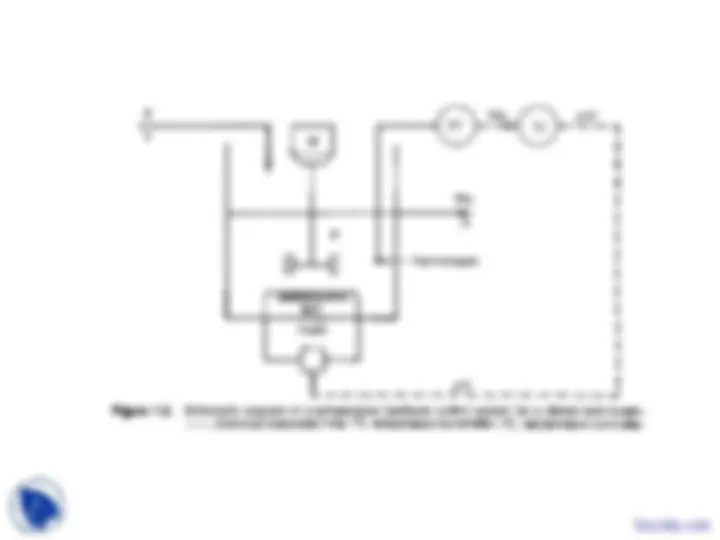
Why do we need automatic
process control?
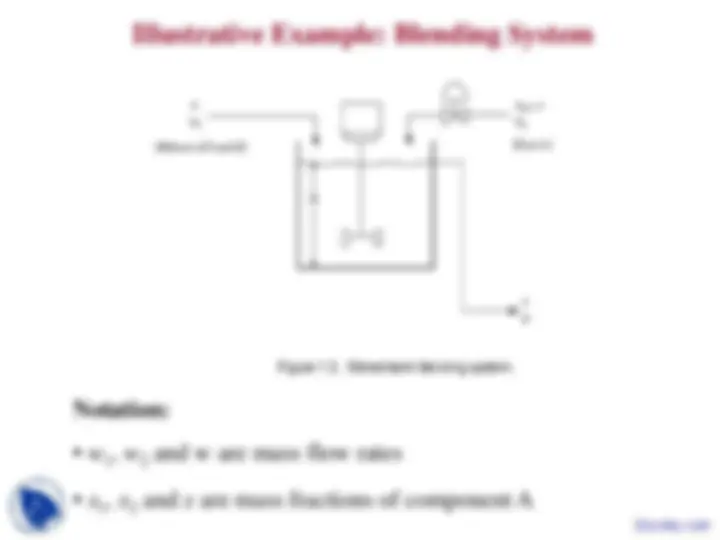
Assumptions:
Control Objective:
Keep x at a desired value (or “set point”) x sp , by adjusting flow
rate w 2, despite variations in x 1 ..
Terminology:
Design Question : What value of w 2 is required to have x = xSP?
Overall balance:
Component balance:
0 = w 1 (^) + w 2 − w (1)
w x 1 1 (^) + w x 2 2 (^) − wx = 0 (2)
(The overbars denote nominal steady-state design values.)
x = x SP x = xSP x 2 (^) = 1 w 2
1 2 1 1 (3)
SP SP
x x w w x
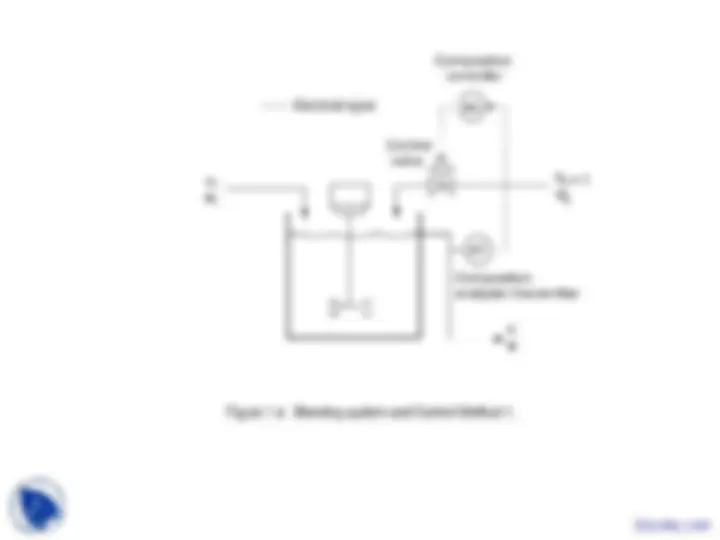
Possible Control Strategies
w 2 (^) ( ) t (^) = w 2 (^) + K (^) c xSP − x t ( ) (4)
Method 3. Measure x 1 and x, adjust w 2.
Method 4. Use a larger tank.
out due to the larger capacitance of the tank contents.
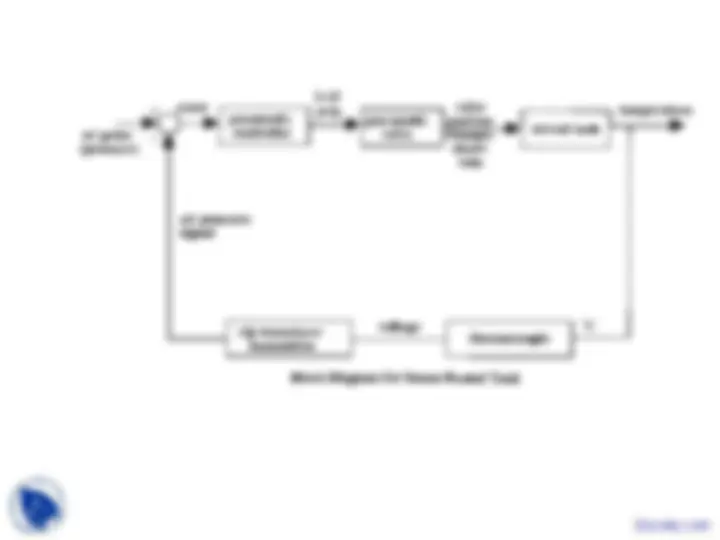
Feedback Control
Feed Forward Control