Download Development - Process Control - Lecture Slides and more Slides Process Control in PDF only on Docsity!
1
Development of Empirical Dynamic
Models from Step Response Data
Some processes too complicated to model
using physical principles
- material, energy balances
- flow dynamics
- physical properties (often unknown)
- thermodynamics
2
Black Box Models
4
Chapter 7
5
Fitting of 1st-Order Model
( ) ( )
( ) (^) ( )
( )
/
0
t
t
K M
G s U s
s s
y t KM e
y KM
dy
KM dt
τ
τ
τ
τ
−
=
7
FOPDT and SOPDT Models
( )
( ) (^2 )
First-Order-Plus-Dead-Time (FOPDT) Model
Second-Order-Plus-Dead-Time (SOPDT) Model
s
s
Ke
G s
s
Ke
G s
s s
θ
θ
−
−
8
For a 1st order model, we note the following characteristics in step response:
- The response attains 63.2% of its final response at one time constant (t = τ+θ ).
- The line drawn tangent to the response at maximum slope (t = θ) intersects the 100% line at (t = τ+θ ).
There are 3 generally accepted graphical techniques for determining the first-order system parameters τ and θ.
( ) 1
s Ke G s s
θ
−
Fitting of FOPDT Model
Chapter 7
10
Method 1: Sundaresan &
Krishnaswany (1978)
- Find K from stead-state response.
- Normalize step response by dividing all data with KM (t = 0, y = 0; t →∞, y = 1)
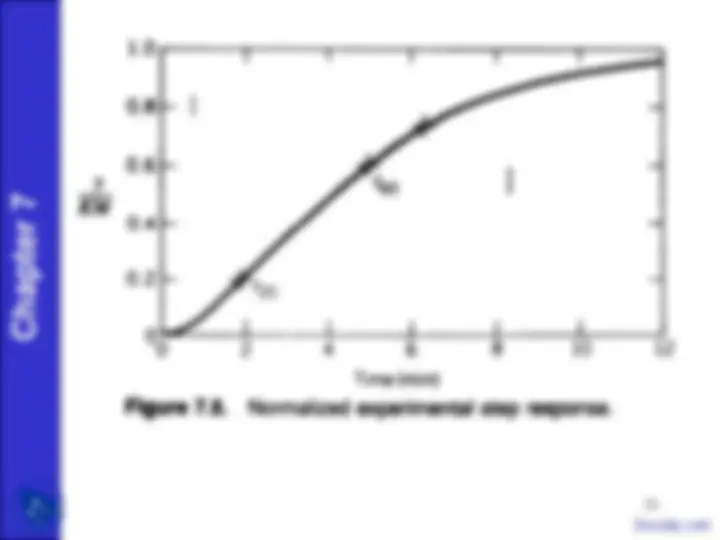
- Use 35.3% and 85.3 % response times (t 1 and t 2 ), i.e.
- Calculate θ = 1.3 t 1 – 0.29 t τ = 0.67 (t 2 – t1 )
Chapter 7
1 2
y t KM y t KM
=
11
Method 2: Numerical Fitting
( )
( )
(1) Find and in ( ) 1
to fit data of vs.
(2) Find and in ln
to fit data of ln vs.
t
y t KM e
y t
KM y t t
KM
KM y t
t
KM
θ
13
Chapter 7
is virtually indistinguishable from the step response of the integrating element
2 ( )^2 (7-23)
K G s s
=
In the time domain, the step response of an integrator is
y 2 ( ) t = K Mt 2 (7-24)
Hence an approximate way of modeling a first-order process is to find the single parameter
(^2) τ (7-25)
K K =
that matches the early ramp-like response to a step change in input.
14
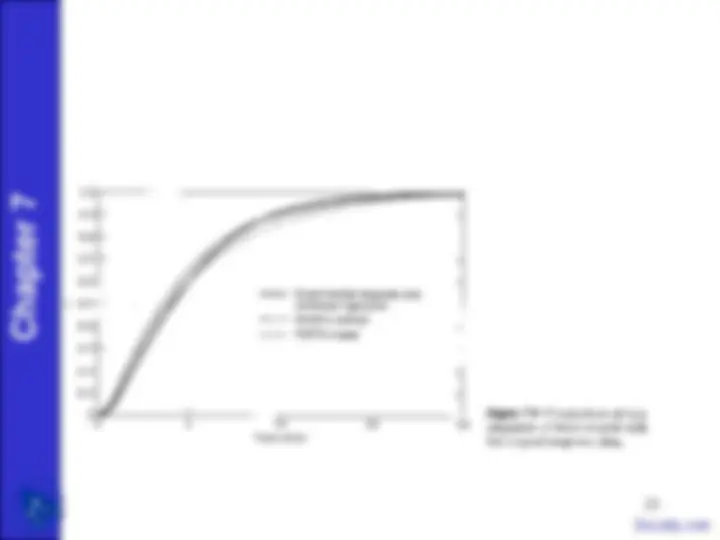
Chapter 7
Figure 7.10. Comparison of step responses for a FOPTD model (solid line) and the approximate integrator plus time delay model (dashed line).
16
Chapter 7
Harriot’s Method
1.
0.
17
0.
0.
τ 1 ≥τ 2
19
Smith’s Method
( )
( )
60
20 20 60
1) Determine t and t experimentally so that
2) Fig 7.7 ,
y t KM
y t KM
t
t
ζ τ
20
Chapter 7