Download stabilité des systèmes and more Lecture notes Control Systems in PDF only on Docsity!
��������� �� � � �
� ����� ������� �
� ����� � �� ���������� �� �� � � � "�� )������� � �!���) !� ��� �*!�� � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � "�" +��$!��� � ,���- � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � �
� ������� �� ������� � �� ������ � ��� ���� �!���%� � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � " ��" �!���! ��! � !� ���� � ��� � ,���- � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � " ��� .�!$ � *�� ϕm � .�!$ � /��� GM � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � "
� ������ �� ���������� �� �� ������� � ��� �!��� � T (jω) ���� � ��� � ,���- � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � ��" 01 � � �������� � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � ��� 01 � � �������� � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � ��� 01 � � �������� + � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � �
� ���� �� ���������� �� !" # ����� ����� � ������ ��� �� ��� �� !���$ � 2�� ���!� � ���$��� � ��� *�� � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � 2�" !������� � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � 2�� !)�!���� � �� � ���� � ,3 � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � 2
���� � �� � # ��������� �� !���$ %
���� � �� � &
H 3 (p) =
e−^2 p 1 + 4p H 4 (p) =
0 , 5 (1 + 2p)^3 � � " !� ����� ���� ��������� � ,���� 3 !�� < ����� ���� ��!! �� �! �+ � $��� A@ � �������� � � � � � ������$!����� T i � � ��!������� T d� ���� ���� �� �!�� � �� ���!� ��! �� ���������@ �� ���*��� ��� !���! �� � ������ � !� ����� � ,���� 3 !�� � ���� )���@ �� ��� !�������� ��! �� � � A� � �� ��B��� ���! �� ������ �
������� # A = 10 # T 3 (p) �� T 4 (p) ��� �� ����� �� !" '
C T 3 (p) =
A · e−^2 p 1 + 4p
@ ��! ��� !���! � � A� � � � ���� ) !�� @ �� )��� !�����! � A·e−^2 p^ +1+4p = 0� → �� ������ < !�����! � C T 4 (p) =
A · 0 , 5 (1 + 2p)^3
@ ��! ��� !���! � � A� � � � ���� ) !�� @ �� )��� !�����! � → A · 0 , 5 + (1 + 2p)^3 = 0� → )������ @ ���� �� )���� < !�����! � �
D � �!���! � $�����!�%� � � ��� �� ��! � � ���� � � $!� �%� � ��! ��� !���! �� ��������� � � !� ����� � � ���� ) !�� � � � ���� � � ���� ��� �� � < � � !� ����� ����� � � )�������� � �!���) !� �������� �� �!�! ����� �� !�� ����� ��! ��!� �!� ��� ���� ������� � ������ ����� E�!���! � ��� �!�� �F� D � �!���! � $�����!�%� � ������ �� !���� �� � �� � � ���$!��� � � ,���-@ � �� ��� �� � �� � � ���$!��� � � ��%���� � � ,� � � +��� � ���! � � ���!� ���� �������� !��� %� � ���$!��� � ,���-�
G��%��< !�� ��@ ���� ����� ������ � � !� ����� � � � ���� ����� < � � ��$���H � � �! �� � �� ���� �@ ��� �
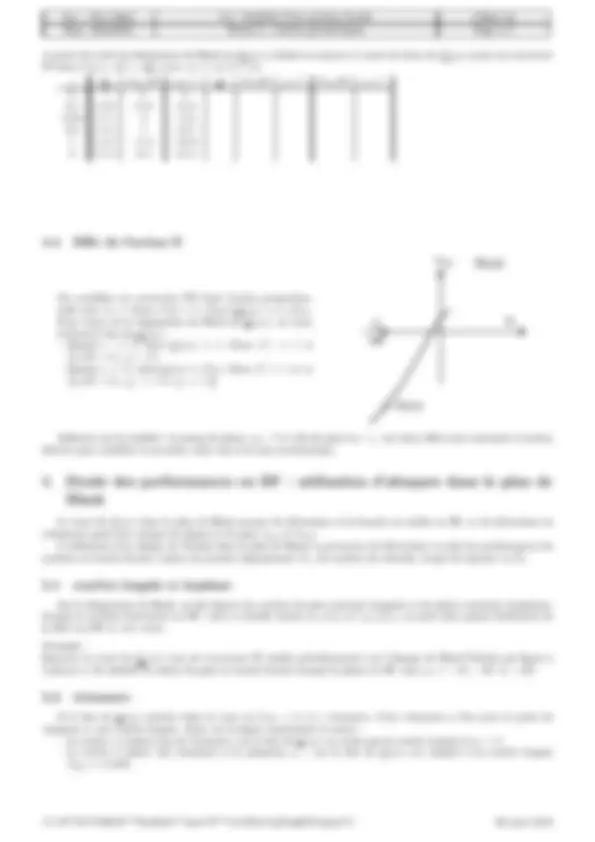
ω � �� ��� !� ���� ����� � � �� *���$ � ��!�� � �� ���� ��������!� � !� ����@ � �� ������ � �� I�! ��� � !���%� � �� %� �� �� )��� � � �������� � � � � � �� �!���� � � � ������ �@ � ��! �� ��! !�� ������� �� �!���� ��! ������ � �� ����������
S√2 (^) ωt
ϕ
s(t) E√ ωt
e(t)
H(jω)
D� )������� � �!���) !� ��� �*!�� H(jω) ������ �� �! � ��J��� p �! jω ���� �� )������� � �!���) !� �����! * H(p)�
������� ������ �� H 3 (jω) �� �� H 4 (jω)
H 3 (jω) =
e−^2 jω 1 + 4jω H 4 (jω) =
0 , 5 (1 + 2jω)^3
D ���$!��� � ,���- �� � �!��� �� �� ��� � �� )������� � �!���) !� H !��� � ����� � EHdB F � )������� � �� *�� H !��� � � $!�� EKF�
������� � �� �� � ��� � H 3 (jω) ω |H 3 | H 3 dB ϕH 3 (rad) ϕH 3 (K) & � & & & &@� &@L� #&@:� #&@24 #��@� &@"2 &@(� #� #�@"L #(�@: &@2 &@�2 #( #"@�� #�"&@( � &@"� #�"@� #�@�� #�L&@: " &@�" #�4@� #2@�2 #��"@� → + ����! � �� � � H 3 (jω) ���� � ��� � ,���- ��! ����� H ��
������� � �� �� � ��� � H 4 (jω) ω |H 4 | H 4 dB ϕH 4 (rad) ϕH 4 (K) & &@2 #: & & &@� &@�( #:@2� #&@2L #��@L &@"2 &@�: #4@L� #�@�L #(L@( &@2 &@�4 #�2 #"@�: #�� � 4 , 5. 10 −^2 #"( #�@�" #�L&@� " 7 , 1. 10 −^3 #�"@L #�@L4 #"" → + ����! � �� � � H 4 (jω) ���� � ��� � ,���- ��! ����� H ��
�)�)� .����� ������� �� ����� �� ����
��! �� � �� ��� !���� ��! � � $!� � ��������� E � ��������������@! ��! �� ��� � �� D 1 � )���� �� ����� F@ � �� !� ����� Etr5%F � �� � ���� @ �� !�$� � $���!�� � 2�, E!�$��$ ��!F O GM O (�, E!�$��$ ���F �� �%� � ��@ ��! �� GM = 6dB �&KE!�$��$ ��!F O ϕM O :&KE!�$��$ ���F �� �%� � ��@ ��! �� ϕM = 45K
��� �! T (jω) � � �� � �� ��
+�� ����� ��>< �� �!��� � H(p) ���� � ��� � ,���-@ �� ����! �����! ��� ��! � �!��� � T (p)� ?� !� �� ��! � �� %� T (jω) = H(jω) × C(jω) C +���@ � �� ��� � �� 3�,? ����!�� � |T (jω)| = |H(jω)| × |C(jω)|� 0� ����� �� � GT dB = GC dB + GH dB C � �� *�� � �� 3�,? ���� � ϕT = ϕC + ϕH
+��� � ��� ���� ��!! �� �! < ������ !� �!����� �� � C(p) = A@���� � GT dB = 20logA + GH dB @ � ϕT = 0 + ϕH = ϕH D� �� �� �����$� � D $��� �� ��$� ��� ���� �������� 20 logA� +��� � ���$!��� � ,���-@ �� ���!� � $��� �� �!������� � C � !� � ��� �� � $��� �� �� �!� �! < � EA > 1 F � ��� � �� ���!� �� � C � !� � ��� �� � $��� �� ��)�!� �! < � EA < 1 F � ��� � �� ���!� �� " � � �� � �� ��������� � ���� �� ��;������ E��� �P A > 1 F !� !� � � �� � � �� ���� �!���%� � ���������� � !� �����
ϕT
G (^) BO =20log( (^) ⎜T (^) ⎜)
C
-180˚�
A=
������� � ���� � � ��� � ��� � T 4 (jω) �!��! �� �!��� �� ���$!��� � ,���- � H 4 (jω) ����� � ��� H �@ �!��! � � �� �H � T 4 (jω) ��! A = 5 � A = 20� ��! �*�%� ���!� � C +�� !���! �� � ������ �� ����� �� ��� � ,���� 3 !�� � A = 5 → stable@ A = 20 → instableenBF C 0� ��� � ���������@ ��� !���! � � ��!$ � � $��� GM � � *�� ϕM �A = 5 → GM = 10dB; ϕM = 50K
?� �������! �� ��!! �� �! � ���� �������� !� �!����� �� ���� A = 1�
+���@ C(p) = 1+
1 Tip
� C(jω) = 1+
1 jTiω
� ,���- � T (jω)@ �� �!�� ���� �!� � �� � � C(jω)� C Q���� ω → 0 @ ���!� C(jω) ≈
1 jTiω
� +��� |C| → +∞ � GC dB → +∞ R ϕC → − π 2 C Q���� ω → ∞@ ���!� C(jω) ≈ 1 � +��� |C| → 1 � GC dB → 0 R ϕC → 0 ?� )��� ����� $!� *�%� � �� � � ���� � GH dB + GC dB � ϕH + ϕC ��! ��� ��! � �!��� � T (jω)�
ϕT
G BO
C
-180˚�
H(jω)
Black
� � �� � �� ��������� � �� ��!$ � �� ϕM � � $��� GM ������ ��� D ������ � �� �� ��� ������� � � � �� � �� � ������ � ?� ������� %� GT → +∞ %���� ω → 0 � +��� T (p) → +∞ %���� ω → 0 � � ���� @ ��� !�� � ���!�� � �� ��� �! ;��� �
�s = lim p→ 0 p�(p) =
∆W 1 + T (p) @ �� �� �����! %� �s = 0� 01 ���� � ��@ � !A� !���� �� � �������� � �� � �� !��!
�����!� �����%� �
������� � ���� � � ��� � ��� � H 3 (jω)
�!��! �� �!��� �� ���$!��� � ,���- � H 3 (jω) !������ � ��� H "@ �!��! � � �� �H � T 3 (jω) ��! �� ��!! �� �! � ��!� C(p) = A(1 + (^) T i^1 p ) �� � A = 1 � T i = 4s� ω |H 3 | GH 3 dB ϕH 3 (K) |C| GC dB ϕC EKF GT 3 dB ϕT 3 (K) & � & & +∞ +∞ #L& +∞ #L& &@� &@L� #&@:� #��@� "@( 4@: #:4@" (@L: #�&�@ &@"2 &@(� #� #(�@: �@� � #�2 & #��4@: &@2 &@�2 #( #�"&@( �@�" &@L( #":@: #:@&� #��(@� � &@"� #�"@� #�L&@: �@&� &@": #�� #�"@&� #"&�@: " &@�" #�4@� #��"@� �@&� &@� #(@� #�4 #��L@"
� �� ���� A = 1� +���@ C(p) = 1+Tdp � C(jω) = 1+jTdω� ��! �!��! � � ���$!��� � ,���- � T (jω)@ �� �!�� ���� �!� � �� � � C(jω)� C Q���� ω → 0 @ ���!� C(jω) ≈ 1 � +��� |C| → 1 � GC dB → 0 R ϕC → 0 C Q���� ω → ∞@ ���!� C(jω) ≈ jTdω� +��� |C| → +∞ � GC dB → 0 R ϕC → +∞ ϕC → + π 2
ϕT
G BO
C
-180˚�
H(jω)
Black
� � �� � �� ��������� � �� ��!$ � *�� ϕM ↗ � � �� � $��� GM ↘ � D � � �H 1 �� ���� ����!��! �� D������� ��!��� �� ��������! � !� ����@ ���� � �� �� �� �� ���������%� �
D �!��� � T (jω) ���� � ��� � ,���- !� � � ��� !���! �� �� � ���� �� ����� � ,3@ � � ��� !���! �� !����� �� $!S� ��H ��!$ � � *�� � � � $��� EϕM � GM F� D������������ ���� � ��� � ���� � ���� � ��� � ,���- �� !� ��! � ��� !���! � ��� � � !)�!���� � �� ������ � � ���� ) !�� E��� �! ��! ��! �� ��� � �� D 1 @ �� ����! �! � ����@ � � � � !� ��� tr 5 %F�
��! � ���$!��� � ,���-@ �� )��� ;$�!! � � ���!� � � $��� �������� E���$���F � � *�� �������� E��� *�� F@
��!�%� � ������ )�������� � ,3� � � � ����� !�� �� EϕT @GT F � EϕF @GF F@ �� �� ���� ���! )���� � �� � �� ,? < �� ,3 � ��� � !���
������� � �!�! � �!��� � T 3 (jω) E��� �� ��!! �� �! � !������ !���� �� ��F ��! �����%� � ,���-#���*��� %�� ;$�! < ����� H "� 0� �����! �� ��� �! �� $��� � � ���� ) !�� ��!�%� �� *�� � ,3 ���� ϕF = − 10 K@ − 90 K � − 120 K
�� � �� � � T (jω) ����! ���� �� N�� �P GBF > 0 @ �� � ��� � ���� � �� !������� � �� � ��! � ���� � ���$ �� � �� ���!� ���$���� ����@ ��! �� ;$�!! !�� ��� ��#����! � C �� ���!� � ����� � �� � !������� @ ��! � �� � � T (jω) � �!��� �� �� ���!� ���$��� GBF > 0 � C �� ���!� " ��� � �� !������� < �� �������� ωr @ ��! � �� � � T (jω) �� ���$ �� < �� ���!� ���$��� GBF = 2, 3 dB�
-270 -240 -210 -180 -150 -120 -90 -60 -30 0
0
10
20
Gain (dB)
Phase (˚)
Diagramme de Black de H 3 et T 3
-270 -240 -210 -180 -150 -120 -90 -60 -30 0
0
10
20
Diagramme de Black de H 4 et T 4
Gain (dB)
Phase ( )
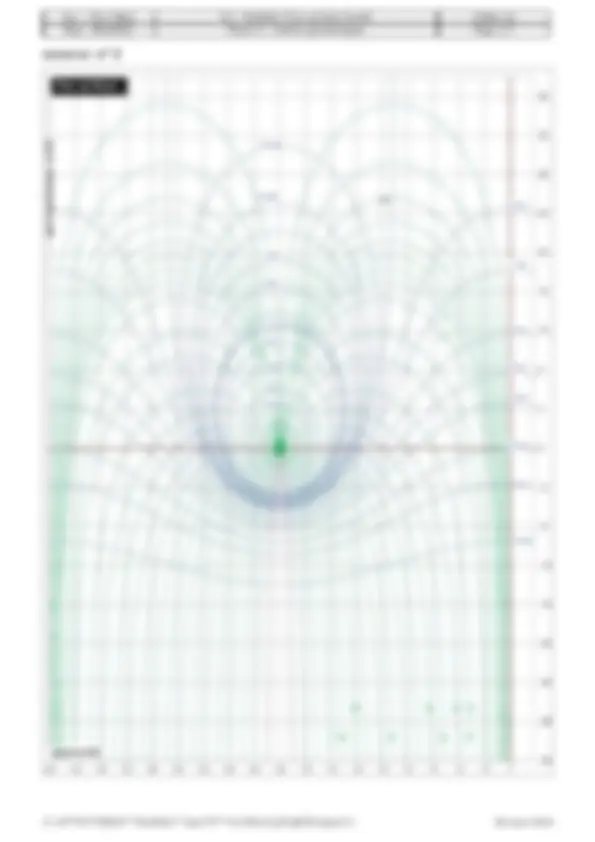
Plan de Black.
-0,5 dB
-1 dB
-3 dB
-4 dB
-6 dB
-8 dB
-12 dB
6 dB
4 dB
1,4 dB
1 dB
0,5 dB
0,25 dB
-1 �
0,
-5 �
2,3 dB
-8 �
3 dB -10�
8 dB
-90�
0
4
8
12
16
20
24
28
32
36
-360 -340 -320 -300 -280 -260 -240 -220 -200 -180 -160 -140 -120 -100 -80 -60 -40 -20 0
phase en BO
gain logarithmique en BO
-120� -60�
-50�
-40�
-30�
-20�
-150�
-2 dB