



Structure from Motion
Computer Vision
Docsity.com


























Study with the several resources on Docsity

Earn points by helping other students or get them with a premium plan

Prepare for your exams
Study with the several resources on Docsity
Earn points to download
Earn points by helping other students or get them with a premium plan
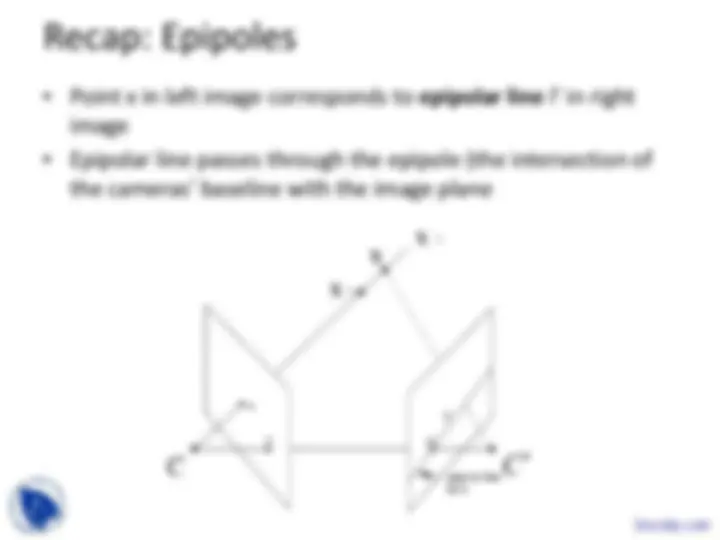
These are the Lecture Slides of Introduction to Computer Version which includes Machine Learning, Framework, Prediction Function, Feature Representation, Image, Desired Output, Prediction Function, Prediction Error, Predicted Value etc. Key important points are: Structure From Motion, Epipolar Geometry, Affine Structure, Epipoles, Left Image, Epipolar Line, Baseline, Intersection, Image Plane, Matrix Maps
Typology: Lecture notes
1 / 43

This page cannot be seen from the preview
Don't miss anything!
Computer Vision
Structure from motion
Camera 1 (^) Camera 2 Camera 3 R 1 ,t (^1) R 2 ,t 2 R^3 ,t^3
? ??^ Noah SnavelySlide credit:
?
Docsity.com
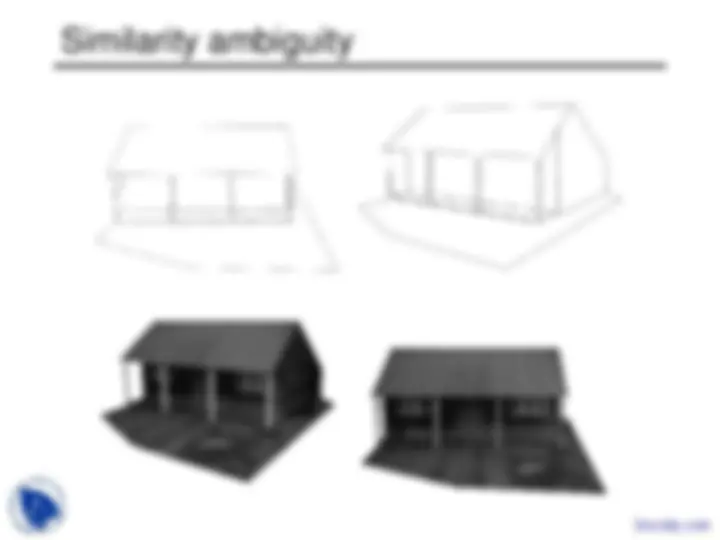
How do we know the scale of image content?
Structure from motion ambiguity
-
x 1 j
x 2 j
x 3 j
Xj
P 1
P 2
P 3
Slides from Lana Lazebnik Docsity.com
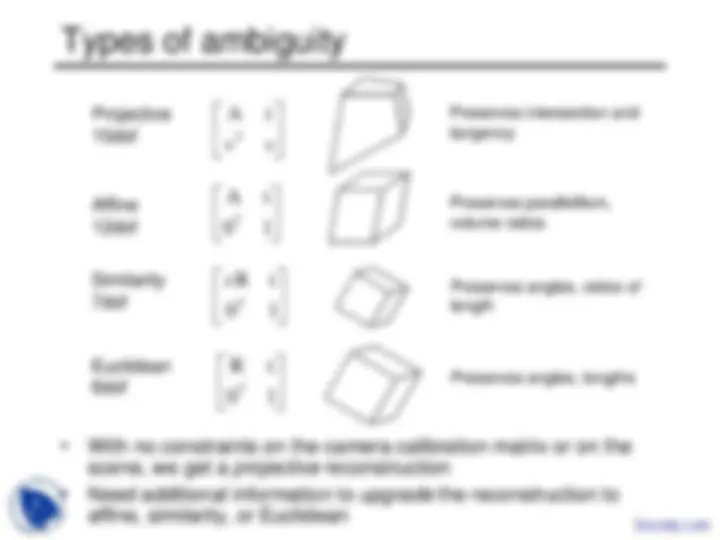
Types of ambiguity
vT v
Projective A t 15dof
Affine 12dof
Similarity 7dof
Euclidean 6dof
Preserves intersection and tangency
Preserves parallellism, volume ratios
Preserves angles, ratios of length
0 1
A t T
0 1
R t T
s
0 1
R t T^ Preserves angles, lengths
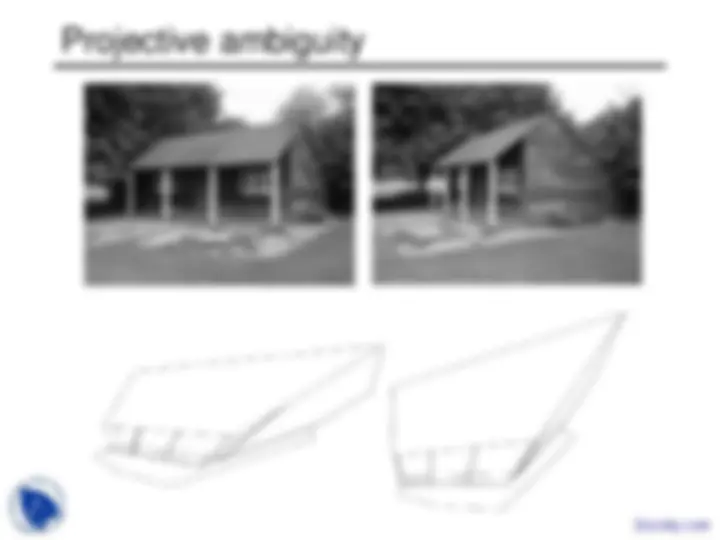
Projective ambiguity
x PX PQ QP X
- P
vT v
A t Q p
Affine ambiguity
x PX PQ QA X
- A
Affine
0 1
A t QA T
Affine ambiguity
Similarity ambiguity
1 1
m
i
n
j
E P X D x ij P i X j
x 1 j x 2 j
x 3 j
X j
P 1
P 2
P 3
P 1 X j
P 2 X j^ P^3 X j