



The UART project
Applying what we’ve learned
about Linux device-drivers to the
PC’s serial-port controller
Docsity.com













Study with the several resources on Docsity

Earn points by helping other students or get them with a premium plan

Prepare for your exams
Study with the several resources on Docsity
Earn points to download
Earn points by helping other students or get them with a premium plan
Main points are: Uart Project, Linux Device-Drivers, Serial-Port Controller, Universal Asynchronous Receiver-Transmitter, Machine-Code Details, Pc-To-Pc Communications, Device-Driver Module, Kudlick Classroom, Linux Char
Typology: Slides
1 / 43

This page cannot be seen from the preview
Don't miss anything!
rackmount PC system
student workstation
KVM cable
rackmount PC system
student workstation
KVM cable
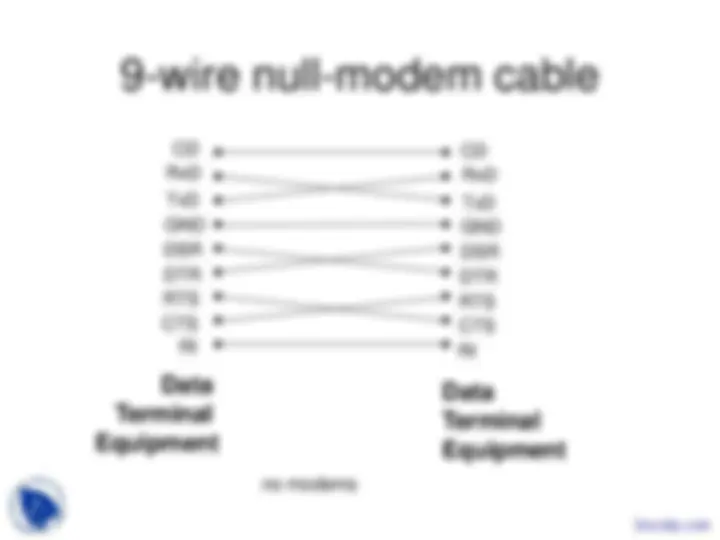
‘ null-modem’ serial cable
ethernet cables
Indicates a “null-modem” PC-to-PC serial cable connection
lectern
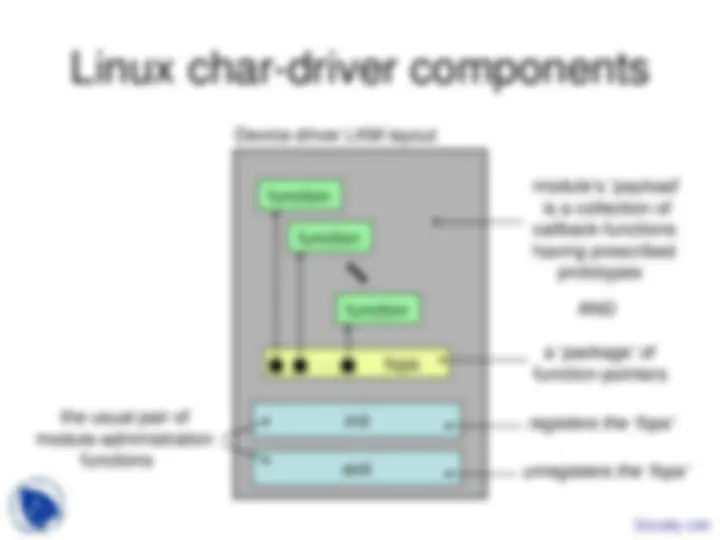
init
exit
fops
function
function
function
...
Device-driver LKM layout
registers the ‘fops’
unregisters the ‘fops’
module’s ‘payload’ is a collection of callback-functions having prescribed prototypes
AND
a ‘package’ of function-pointers
the usual pair of module-administration functions
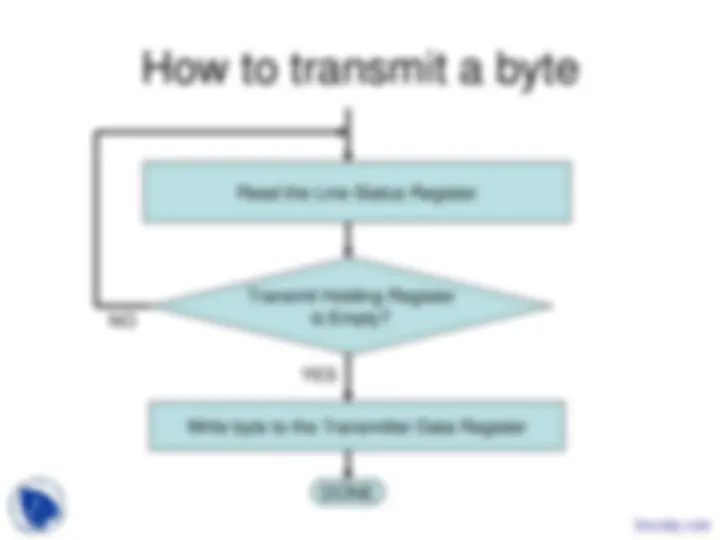
The Transmitter Holding Register (8-bits)
The transmitter’s internal ‘shift’ register
clock
Software outputs a byte of data to the THR
The bits are immediately copied into an internal ‘shift’-register
The bits are shifted out, one-at-a-time, in sync with a clock-pulse
start bit
stop bit
data-bits
clock-pulses trigger bit-shifts Docsity.com
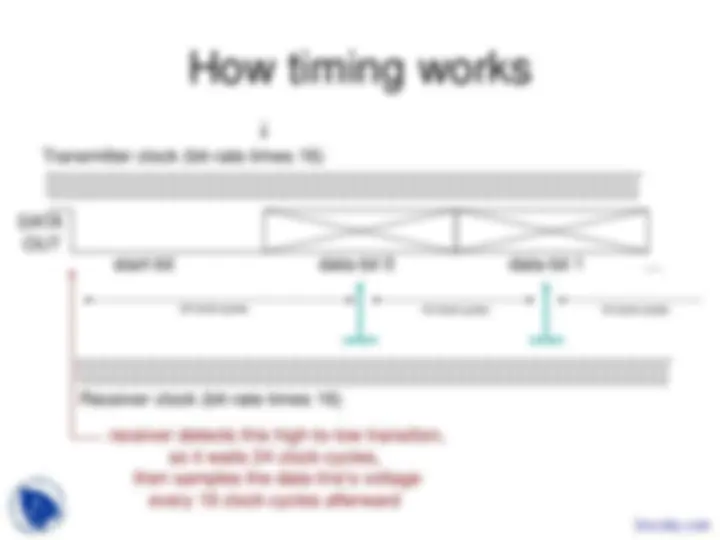
clock
input voltage
clock-pulses trigger voltage-sampling and bit-shifts at regular intervals
The receiver’s internal ‘shift’ register
1- 0-1-1-0-0-0-0-1 -
start bit
stop bit
data-bits
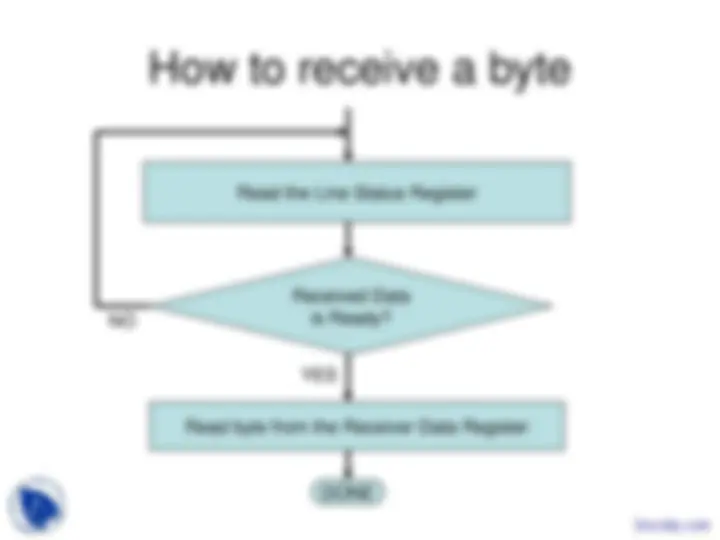
The Receiver Buffer Register (8-bits)
Software can input the received byte from the RBR
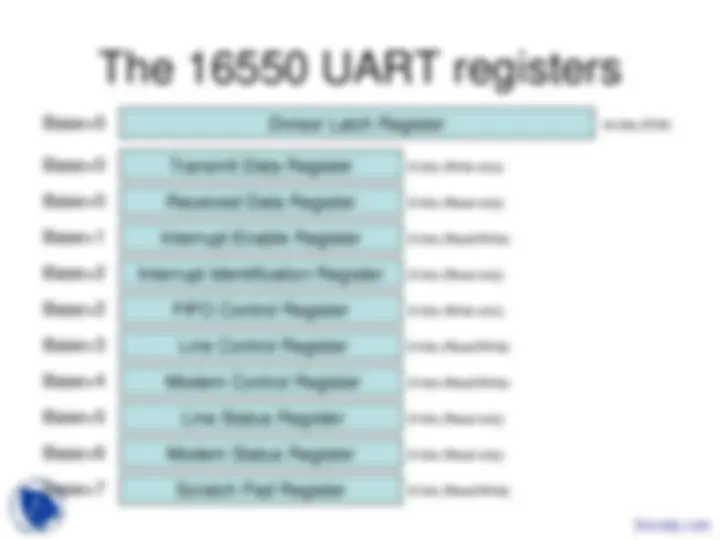
Transmit Data Register
Received Data Register
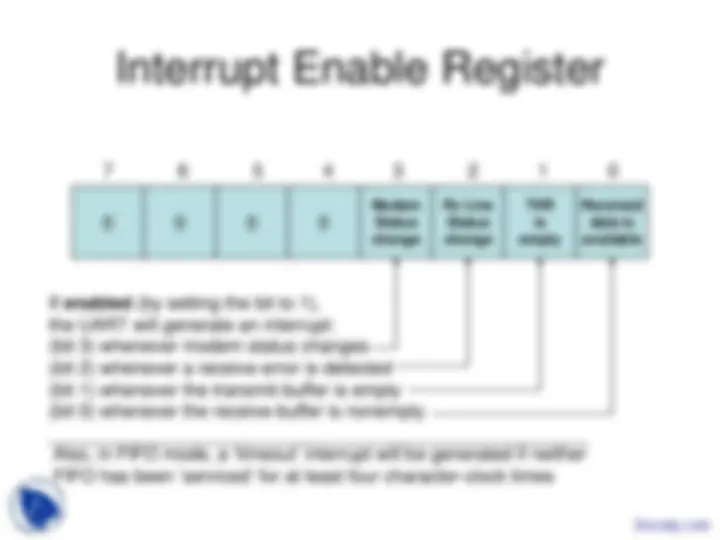
Interrupt Enable Register
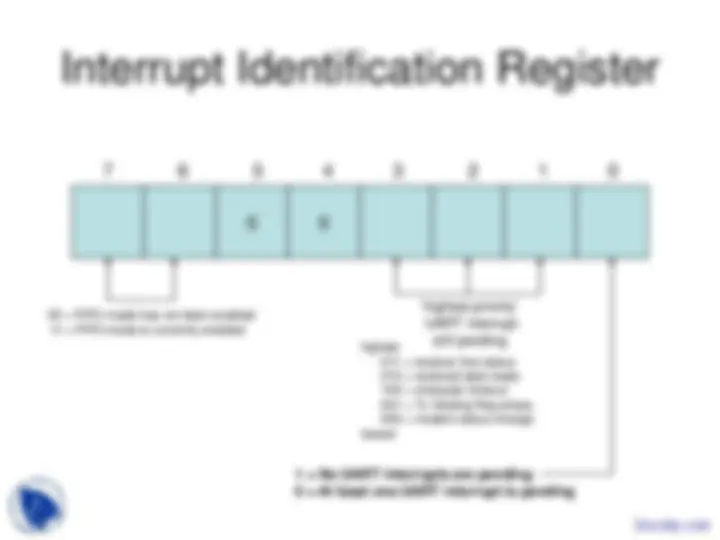
Interrupt Identification Register
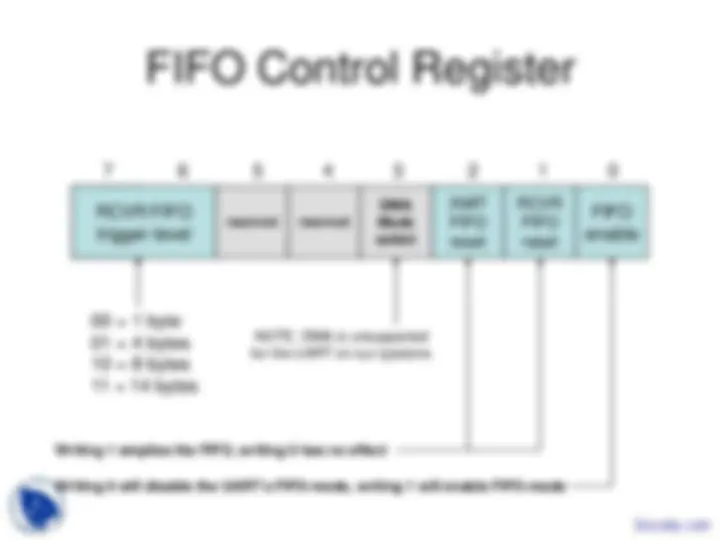
FIFO Control Register
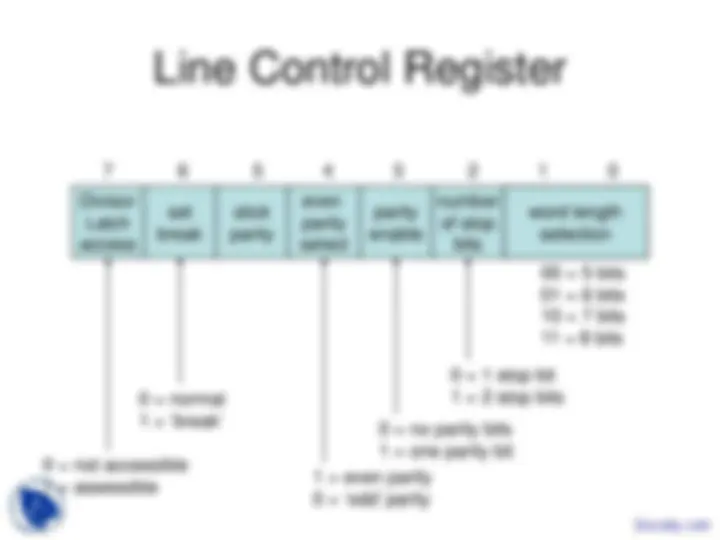
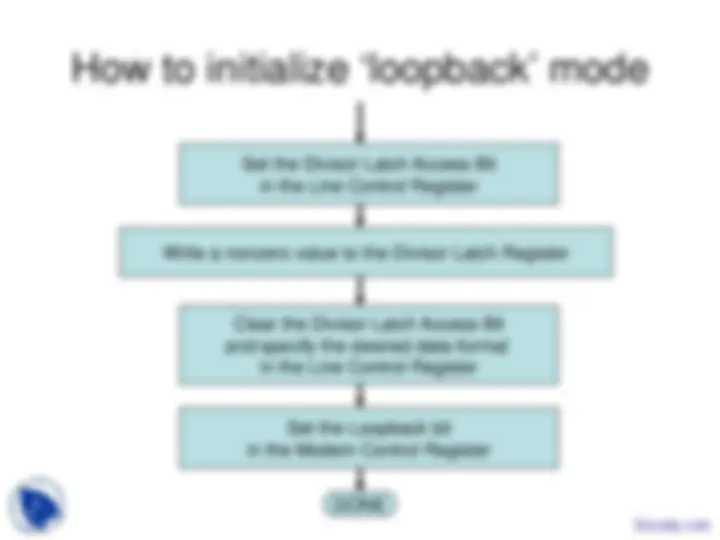
Line Control Register
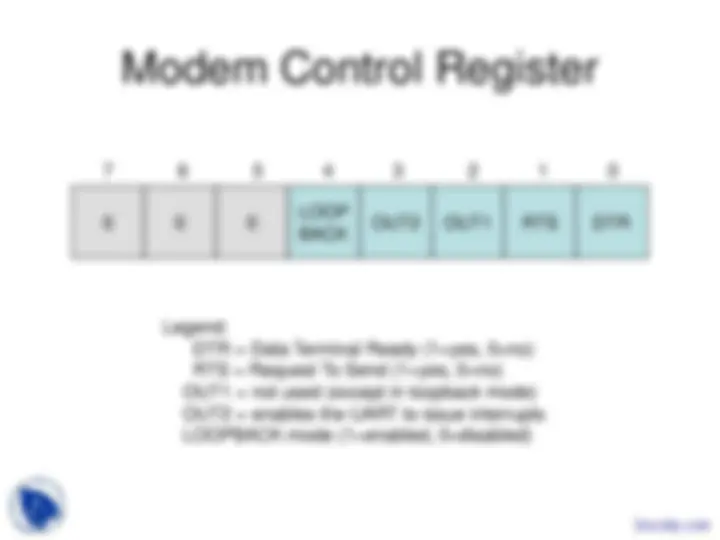
Modem Control Register
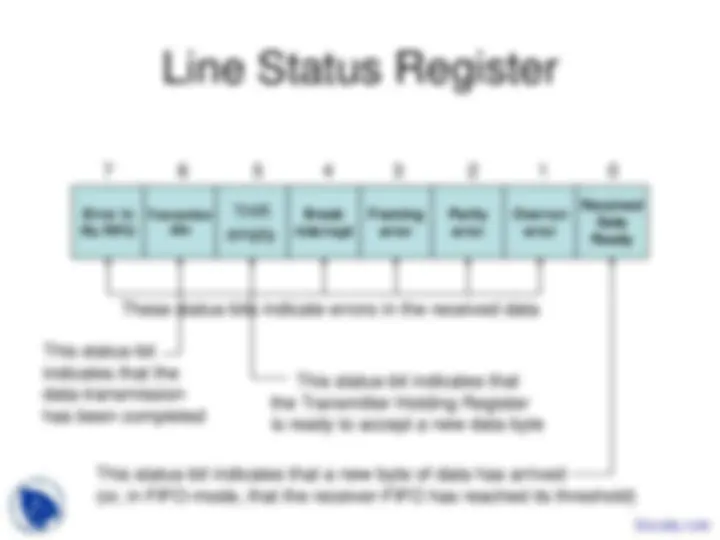
Line Status Register
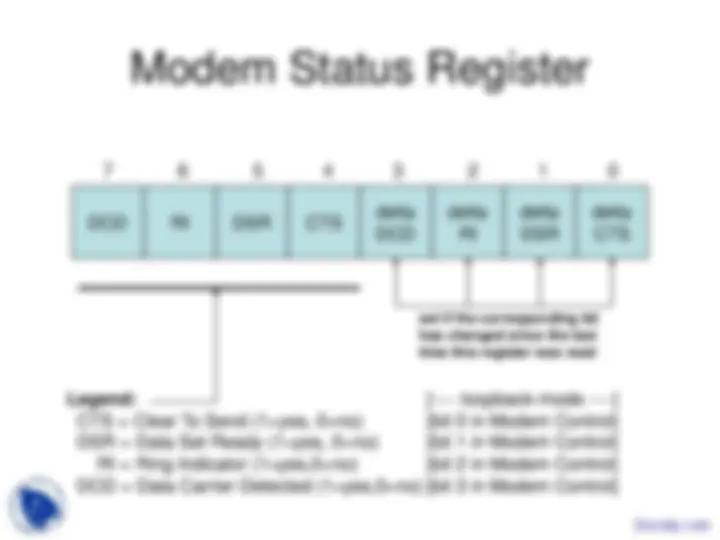
Modem Status Register
Scratch Pad Register
Divisor Latch Register 16-bits (R/W)
8-bits (Write-only)
8-bits (Read-only)
8-bits (Read/Write)
8-bits (Read-only)
8-bits (Write-only)
8-bits (Read/Write)
8-bits (Read/Write)
8-bits (Read-only)
8-bits (Read-only)
8-bits (Read/Write)
Base+
Base+
Base+
Base+
Base+
Base+
Base+
Base+
Base+
Base+
Base+