¡Descarga Cálculo de límites y derivadas: Rectas tangentes y rectas secantes y más Esquemas y mapas conceptuales en PDF de Cálculo solo en Docsity!
4. Derivadas.
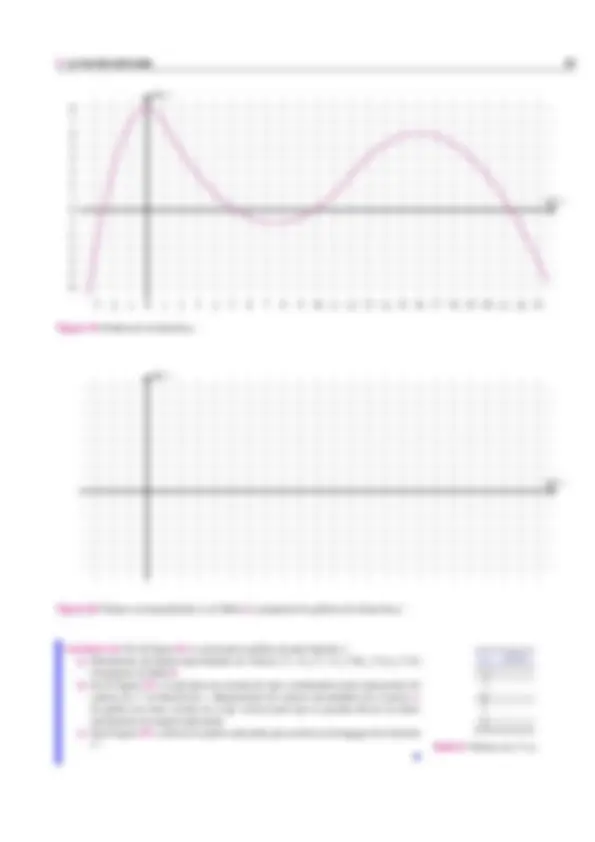
Figura 1: Temperatura en función de la altura.
Figura 2: Erlenmeyer y vasos de precipita- do.
La forma de los recipientes y el modo en que varía (su sensibilidad) la altu- ra del líquido respecto a su volumen juega un papel importante en la pro- pagación de errores experimentales en los trabajos de laboratorio.
En el presente módulo nos dedicaremos a estudiar la velocidad : la velocidad a la que se mueve un objeto, la velocidad de las reacciones químicas, la velocidad de crecimiento de un cultivo bacteriano, la velocidad de propagación de una enfermedad, etc.
Los ejemplos anteriores son todos ejemplos que hacen referencia a situaciones donde la variable independiente es el tiempo.
- El movimiento de un objeto está representado por su posición que varía en función del tiempo ; la velocidad del objeto nos permite saber si el objeto se mueve rápido, despacio, si avanza o retrocede.
- En las reacciones químicas, se estudia la cantidad de sustancia que reacciona en función del tiempo. Hay reacciones lentas que pueden durar años y otras muy rápidas que suceden en una fracción de segundo.
- La concentración de un medicamento en el cuerpo es variable en función del tiempo. Los estudios farmacológicos y fisiológicos permiten estudiar cómo controlar la velocidad a la que el cuerpo “absorbe” el medicamento.
- En cuanto al crecimiento de un cultivo, de manera similar, se estudia el tamaño de un cultivo como función del tiempo. El crecimiento de un cultivo generalmente se mide según la densidad óptica o el área ocupada. Se estudian generalmente los factores que influyen en la velocidad de crecimiento de las poblaciones; que pueden ser la temperatura ambiente, el tipo de nutriente, la presencia de luz, etc.
- Las velocidad de propagación de las enfermedades también se refiere al modo en que una infección se expande en un territorio en función del tiempo medido en días, meses,años, siglos, etc. En este contexto, las velocidades negativas representan procesos dondela cantidad de infectados disminuye.
Sin embargo, las relaciones funcionales en los sistemas reales no siempre refieren exclusiva- mente al tiempo como variable independiente. También se estudia la relación que existe entre variables diversas y nos interesará comprender qué representa la velocidad en esos contextos. Por ejemplo,
- La temperatura ambiente cambia de forma diferente según la altura respecto al nivel del mar en la que nos encontremos. Figura 1.
- La actividad de una enzima en una reacción mejora cuando se varía la temperatura hasta una cierta temperatura crítica a partir de la cual la variación de la temperatura empeora la actividad de la enzima.
- Al volcar un líquido en un recipiente, la altura del líquido varía según el volumen del líquido que volcamos. En el caso de un vaso de precipitado la variación de la altura se produce de manera constante; mientras que en un Erlenmeyer la altura del líquido aumenta más rápido cuanto más lleno está. Ver Figura 2.
1 Estudio de la velocidad.
1.1 Velocidad promedio. Comenzaremos estudiando la velocidad con la que se mueve un objeto. Lo que nos interesa es estudiar el cambio de su posición con respecto al tiempo. Por simplicidad y para usar un ejemplo muy conocido que sirva de base para las futuras definiciones consideraremos un automóvil que se mueve por una ruta. Esto quiere decir que nos enfocaremos en el movimiento del auto en una única dirección: la dirección de la ruta. El auto no se mueve hacia los costados ni hacia arriba ni hacia abajo; sólo nos interesa como avanza o retrocede. La descripción del movimiento unidimensinal se realizará de la siguiente manera:
2 Capítulo 4. Derivadas.
- Se elige un punto de referencia sobre la ruta que represente el valor de la posición 0. Usualmente se decide ubicar el 0 en el lugar donde el auto inicia el recorrido.
- Se elige un sentido de la ruta para que represente los valores positivos de la posición.
- Se eligen unidades adecuadas para medir la distancia y el tiempo.
Con estas premisas se establece que la posición p del auto en el instante de tiempo t está dada por la función
p(t) = ±la distancia (en unidades) a la ubicación del 0 en el instante t (en unidades)
C La presencia de^ ±^ en la expresión anterior se refiere a que la posición del auto se considera positiva si el auto se encuentra del lado positivo elegido para la ruta y se considera negativa si el auto se encuentra del lado contrario.
t (min) p (km) 0 0 1 0. 2 1, 3 9 4 9, 5 9. 6 13 7 18 8 16 9 13
Tabla 1: Posición del auto (en km) en fun- ción del tiempo (en minutos).
Por ejemplo, en la Tabla 1 se representa la posición p del auto, en kilómetros, desde el punto de partida y el tiempo t en minutos.
Actividad 4.1 Discutan con sus compañeros/as y con los docentes las siguientes proposicio- nes. Decidan si son verdaderas o falsas. En todos los casos, expliquen sus respuestas. a) La primera fila de la tabla representa la distancia cero y el tiempo cero. b) Después de un minuto llegó a estar 0,35 km del punto de partida. c) Luego, a los dos minutos ya se encontraba a 1,2 km del punto de partida. d) Entre los minutos 3 y 5 el auto no avanzó. e) Luego acelera para lograr a los 6 minutos estar a 13 km del punto de partida. f) Un minuto más tarde avanzó 5 km más. g) A los 8 minutos, el auto retrocedió porque la distancia al punto de partida fue de 16 km. h) El último dato que se tiene es que a los 9 minutos el auto se encuentra en la misma posición que se encontraba a los 6 minutos de haber partido. �
En la Figura 3 se representan los datos de la posición (en km) del auto sobre la ruta en función del tiempo (en minutos).
t (minutos)
p^
(km)
Figura 3: La posición (en km) del auto sobre la ruta en función del tiempo (en minutos).
Calcularemos la velocidad promedio del auto entre cada par de instantes de la siguiente manera:
4 Capítulo 4. Derivadas.
para cualquier par de instantes que elijamos. En los movimientos no uniformes , la velocidad promedio puede variar según el intervalo que tomemos.
Cuando decimos que la velocidad promedio entre los 6 y los 7 minutos es de 3,65 km/min no tenemos información precisa sobre la velocidad del auto en los instantes intermedios. Tenemos que recurrir al velocímetro interno del auto que nos indica con la aguja la velocidad en cada instante variando la inclinación de la aguja cuando aceleramos o frenamos.
Consideremos ahora otro auto en las condiciones mencionadas previamente para la descripción del movimiento unidimensional. También en este caso consideraremos que p( 0 ) = 0. Pero en esta oportunidad, la posición p (en metros) del auto en cada instante t (en segundos) está dada por la fórmula
p(t) = 3 t^2 para t ≥ 0
La gráfica de la función p se presenta en la Figura 5.
t (seg) 1 2 3
p (en metros)
10
20
30
0
Figura 5: Gráfica de la función posición p(t) = 3 t^2.
Intervalo Vprom [ 1 , 3 ] [ 1 , 2 ] [ 1 , 1. 5 ] [ 1 , 1. 2 ]
Tabla 2: Varios valores para la variación promedio de la función posición p(t).
Actividad 4. a) Calculen la Vprom[ 1 , 3 ]. b) Para un valor t > 1 , redondeen la expresion correcta de Vprom[ 1 , t]
3 t^2 − 3 3 t^2 − 3 t − 1
3 t^2 t c) Usen la fórmula señalada anteriormente para confirmar el valor de Vprom[ 1 , 3 ].
d) Completen la Tabla 2 y grafiquen las rectas secantes correspondientes en la Figura 5.
e) ¿Cuál de los valores: 12 m/s o 6.6 m/s es una mejor aproximación de la velocidad que marca el velocímetro del auto en t = 1 segundo? Explicar la respuesta.
f) ¿Se obtiene un resultado mejor si se calcula Vprom[ 1 , 1. 1 ]?
g) Elijan un valor de t que mejor la precisión.
h) ¿La respuesta del item g) es la mejor de todas las aproximaciones? ¿Se puede mejorar? Si la respuesta es sí, expliquen cómo correspondería realizar esa mejora. Si la respuesta es no, explicar el razonamiento.
i) ¿Cuál es el valor de Vprom[ 1 , t] en el caso que t = 1 segundo?
j) ¿Cuál es el valor que consideran que representa la velocidad instantánea del auto en el instante t = 1 segundo? �
2 Rectas secantes y recta tangente.
Como mencionamos previamente el valor
Vprom[ 1 , t] =
∆p ∆t representa la pendiente de la recta secante a la gráfica de la función p que pasa por los puntos
( 1 , p( 1 )) (t, p(t))
En la Figura 6 se representan las rectas secantes asociadas a los puntos de la Tabla 2.
2 Rectas secantes y recta tangente. 5
t (seg)
- 2 1. 5 2 3
p (m)
10
20
30
0
( 2 , p( 2 ))
( 1. 5 , p( 1. 5 ))
( 3 , p( 3 ))
( 1 , p( 1 ))
Valores de t que se aproximan a 1.
Figura 6: Gráfica de la función posición p(t) = 3 t^2 y varias rectas secantes asociadas a los puntos de la Tabla 2.
Intervalo Vprom [ 1 , 3 ] 12 [ 1 , 2 ] 9 [ 1 , 1. 5 ] 7. [ 1 , 1. 2 ] 6. [ 1 , 1. 1 ] 6. [ 1 , 1. 01 ] 6. [ 1 , 1. 001 ] 6. [ 1 , 1. 0001 ] 6.
Tabla 3: Varios valores para la variación promedio de la función posición p(t).
� Definición 2.1 — Recta tangente - velocidad en un instante. Se denomina recta tangente en el punto ( 1 , p( 1 )) a la gráfica de una función p a la recta que pasa precisamente por el punto ( 1 , p( 1 )) y cuya pendiente coincide con el valor de la velocidad en el instante t = 1.
Vprom[ 1 , t] ︸ ︷︷ ︸ Pendiente de la recta secante para los puntos ( 1 , p( 1 )) y (t, p(t)).
Pendiente de la recta tangente en el punto ( 1 , p( 1 )).
La definición requiere determinar el valor de la pendiente de la recta tangente mediante un proceso de aproximación usando las pendientes de las rectas secantes.
t (seg) 1 3
p (en metros)
10
20
30
0
∆p
∆t t^ (seg) 1 2
p (en metros)
10
20
30
0
∆p
∆t t^ (seg) 1 1. 5
p (en metros)
10
20
30
0
∆p ∆t
2 Rectas secantes y recta tangente. 7
Entonces ma es la pendiente de la recta tangente a la gráfica de f en (a, f (a)).
El gráfico de y = ma (x − a) + f (a) es la recta tangente a la gráfica de f en (a, f (a)).
Usaremos la notación de l´ım de la siguiente forma
cuando b −→ a entonces
f (b) − f (a) b − a
−→ ma.
Se escribe de manera compacta
l´ım b→a
f (b) − f (a) b − a = ma
Figura 9: Recta tangente en el punto (a, f (a)) a la gráfica de la función f.
x
f (^) Recta tangente y = ma(x − a) + f (a)
a
f (a)
(a, f (a))
C La frase cuando b se aproxima a a entonces
f (b) − f (a) b − a se aproxima a ma.
permite conectar la geometría y el cálculo asociado al problema de determinar la velocidad instantánea de un móvil. Por ahora la usaremos como idea intuitiva; en ocasiones diremos “está cerca de” en vez de “se aproxima a” pero estaremos refiriendo a lo mismo.
� Ejemplo 2.1 — Cálculo de la recta tangente a la gráfica de f (x) = x^2 en el punto ( 1 , 1 ). Consideremos la función f (x) = x^2 y el punto ( 1 , f ( 1 )) perteneciente a su gráfica. Para hallar la ecuación de la recta tangente a la gráfica de f en el punto ( 1 , 1 ) debemos encontrar el valor de ma (la pendiente) para escribir la ecuación
y = ma (x − 1 ) + f ( 1 ).
Comenzamos calculando la pendiente de una recta secante que pase por el punto ( 1 , f ( 1 )) y por un punto de la forma (x, f (x)) con x , 1
Vprom[ 1 , x] =
∆ f ∆x
[ 1 , x] =
f (x) − f ( 1 ) x − 1
x^2 − 1 x − 1
(x − 1 )(x + 1 ) x − 1
= x + 1 ¿Se aproxima a algún valor cuando x se aproxima a 1?
8 Capítulo 4. Derivadas.
Por lo tanto, ma = l´ım x→ 1
f (x) − f ( 1 ) x − 1
= l´ım x→ 1 x + 1 = 2
La pendiente de la recta tangente a la parábola y = x^2 en el punto ( 1 , 1 ) es 2 , por lo que la ecuación de la recta tangente es y = 2 (x − 1 ) + 1. �
Actividad 4.4 Realicen la gráfica de la parábola y = x^2 y la recta tangente en el punto ( 1 , 1 ). �
Actividad 4.5 Para dar un poco de sentido a la expresión “aproximar” respondan las siguientes preguntas usando la intuición sobre los valores que se piden. a) Cuando b se aproxima a 4 , ¿a qué número se aproxima 3 b? b) Cuando b está cerca de 5 , ¿de qué número está cerca b^3? c) Cuando b está cerca de 5 , ¿de qué número está cerca 3 b + b^3? d) Cuando b se acerca a 0 , ¿a qué número se acerca
b^2 b
e) Cuando b está cerca de 3 , ¿a qué número se aproxima
b
Nota: La respuesta no es 0. 66 ni 0. 67. �
¿Cómo respondieron a la pregunta del inciso c)? Una opción habrá sido quizás tomar valores de b aproximados a 5 y cada vez más cercanos, para luego calcular 3 b + b^3. Por ejemplo: si consideramos 4. 99 entonces 3 4. 99 + 4. 993 = 139. 22. Si tomamos 4. 99999 (más cercano a 5 que el anterior) entonces 3 4. 99999 + 4. 999993 = 139. 99922. Es razonable pensar que 3 b + b^3 se acerca a 140 si b se acerca a 5. En esta caso también es posible evaluar directamente la expresión 3 b + b^3 por b = 5 y obtener 3 5 + 53 = 140.
2
. 25 0
( 2 , 14 )
(x, (^) x^12 )
Figura 10: Gráfica de la función f (x) = 1 x^2 y la recta secante que pasa por los puntos ( 2 , (^14)
) y
( x, (^) x^12
) .
� Ejemplo 2.2 — Cálculo de la recta tangente a la gráfica de f (x) = 1 x^2
en el punto ( 2 , 14 ). Determinaremos la ecuación de la recta tangente a la gráfica de la función
f (x) =
x^2
La Figura 10 presenta una parte (la correspondiente al cuadrante I) de la gráfica de la función y la recta secante que pasa por los puntos
y
x, (^) x^12
para un x , 2.
Para determinar la pendiente de la recta secante escribimos
∆ f ∆x
[ 2 , x] =
f (x) − f ( 2 ) x − 2
1 x^2 −^
1 4 x − 2
4 −x^2 4 x^2 x − 2
4 − x^2 4 x^2 (x − 2 )
( 2 − x)( 2 + x) 4 x^2 (x − 2 )
− 1 ︷ ︸︸ ︷ �(^2 ��−^ x)(^2 +^ x) 4 x^2 ���(x − 2 ) ︸ ︷︷ ︸ 1
−( 2 + x) 4 x^2
Entonces l´ım x→ 2
∆ f ∆x [ 2 , x] =
4 2^2
La ecuación de la recta que estamos buscando es y = − 14 (x − 2 ) + 14. �
10 Capítulo 4. Derivadas.
además b es siempre menor a a.
Escribiremos b −→ a−. También se dice que a es el límite por izquierda de b.
a
b<a ︷ ︸︸ ︷ b −→ a−
b>a ︷ ︸︸ ︷ a+^ ←− b
C En las notaciones en las que usamos la flecha^ −→^ hay que destacar/remarcar que b ︸︷︷︸ Se mueve
−→ a ︸︷︷︸ Está quieto
C La palabra^ límite^ tiene muchos significados en nuestro idioma castellano. En general asociamos la palabra límite con las ideas de: frontera, límite geográfico, poner límites, poner un tope, velocidad límite como velocidad máxima. Sin embargo, cuando decimos “a es el límite de b” no estamos haciendo referencia a ninguno de los casos anteriores: a no es la frontera de b, a no es el tope de b, etc. En sentido matemático, el significado de la palabra límite está asociado más a la idea de objetivo o a dónde queremos llegar .“ Queremos que b llegue a a". “ Nuestro objetivo es que b alcance a a”. Tendremos que acostumbranos a este nuevo significado de la palabra; que a menudo, si no estamos atentos o atentas, causará confusión.
Definimos entonces el límite de una función numérica f para x → a.
x c (^) a d
y
L
y = f (x)
x → a a ← x
f^ (
x) →
L
f (^) ( x) → (^) L
Figura 11: Esquema para representar que f (x) → L cuando x → a.
� Definición 3.2 — Límite de f (x) cuando x −→ a.
Dada una función f definida, al menos, en (c, d) − {a} decimos
l´ım x→a f (x) = L
si los valores f (x) están tan cerca como se quiera del valor L , siempre que los valores de x están suficientemente cerca de a.
Ver Figura 11.
En forma similar se definen los límites laterales :
x a d
y
L
y = f (x)
a+^ ← x
Figura 12: Esquema para representar que f (x) → L cuando x → a+^ (por derecha).
� Definición 3.3 — Límite lateral por derecha de f (x) cuando x −→ a.
Dada una función f definida, al menos, en un intervalo (a, d) decimos
l´ım x→a+^
f (x) = l´ım x x→ > aa f (x) = L
si los valores f (x) están tan cerca como se quiera del valor L , siempre que los valores de x están suficientemente cerca de a con la condición que x > a (los x están a la derecha de a).
Ver Figura 12.
4 Álgebra de límites y combinación de funciones. 11
x c a
y
L
y = f (x)
x → a−
Figura 13: Esquema para representar que f (x) → L cuando x → a−^ (por izquierda).
� Definición 3.4 — Límite lateral por izquierda de f (x) cuando x −→ a.
Dada una función f definida, al menos, en un intervalo (c, a) decimos
l´ım x→a−^ f (x) = l´ım x x→ < aa f (x) = L
si los valores f (x) están tan cerca como se quiera del valor L , siempre que los valores de x están suficientemente cerca de a con la condición que x < a (los x están a la izquierda de a).
Ver Figura 13.
El límite de una función f puede NO existir cuando x → a por varios motivos. El Teorema 3 .1 establece un primer resultado teórico para determinar la existencia o no del límite de una función.
Teorema 3.1 Dada una función f definida, al menos, en (c, d)−{a} entonces son equivalentes las siguientes afirmaciones
- Existe el límite l´ım x→a f (x) y es igual al valor L.
- Existen ambos límites laterales l´ım x→a+^ f (x) y l´ım x→a−^ f (x) y son iguales al valor L.
Nos parece más importante que incorporen las nociones de límites, antes que las definiciones. Es necesario que construyan su propia intuición acerca del manejo de límites, y luego logren asociar esa intuición con las definiciones formales.
4 Álgebra de límites y combinación de funciones.
En ocasiones es útil reconocer que una función está formada de varias partes o componentes. Identificar, por ejemplo, a una función como la suma , diferencia , producto o cociente de dos funciones puede ser relativamente simple y en ocasiones, el tratamiento de cada una de estas partes por separado contribuye a la simplificación del análisis de interés. Por ejemplo, investigadores que monitorean la producción anual de granos en cierta región del país, descomponen la producción en el producto entre la cantidad de hectáreas plantadas y el rendimiento por hectárea.
Producción total de maíz = Hectáreas plantadas con maíz × Rendimiento por hectárea
Los factores que influyen en la cantidad de hectáreas plantadas (programas gubernamentales, precio proyectado del maíz, entre otros) son cualitativamente diferentes de los factores que influyen en el rendimiento por hectárea (genética del maíz, prácticas de labranza y clima).
4.1 Combinaciones aritméticas de funciones o álgebra de funciones. Dos funciones f y g pueden combinarse para construir nuevas funciones,
f + g f − g f g
f g
de manera similar a la que sumamos, restamos, multiplicamos y dividimos números reales.
4 Álgebra de límites y combinación de funciones. 13
4.2 Propiedades algebraicas de los límites.
A continuación presentaremos algunas propiedades de límites que usaremos en numerosas ocasiones a lo largo del curso. Las propiedades algebraicas se dicen verbalmente como sigue:
- El límite de la suma es la su- ma de los límites.
- El límite de la diferencia es la diferencia de los límites.
- El límite de una constante por una función es la constante por el límite de la función.
- El límite de un producto es el producto de los límites.
- El límite de un cociente es el cociente de los límites (siem- pre que el límite del denomi- nador no sea cero).
Propiedad 4.1 — Propiedades algebraicas de los límites. Sean f y g dos funciones. Supongamos que c es una constante y que existen los límites
l´ım x→a f (x) l´ım x→a g(x)
Entonces a) l´ım x→a [ f (x) + g(x)] = l´ım x→a f (x) + l´ım x→a g(x)
b) l´ım x→a [ f (x) − g(x)] = l´ım x→a f (x) − l´ım x→a g(x)
c) l´ım x→a [c f (x)] = c l´ım x→a f (x)
d) l´ım x→a [ f (x)g(x)] = l´ım x→a f (x). l´ım x→a g(x)
e) Si l´ım x→a g(x) , 0 entonces l´ım x→a
f (x) g(x)
l´ım x→a f (x)
l´ım x→a g(x)
� Ejemplo 4.3 — Cálculo de límites con las propiedades algebraicas. Si l´ım x→ 3 f (x) = 2 y l´ım x→ 3 g(x) = − 3 , se tiene que
- l´ım x→ 3 [ f (x) + g(x)]
a) ︷︸︸︷ = l´ım x→ 3 f (x) + l´ım x→ 3 g(x) = 2 + (− 3 ) = − 1
d) ︷︸︸︷ =
[
l´ım x→ 3 f (x)
]
[
l´ım x→ 3 g(x) = 2 .(− 3 )
]
f (x) g(x)
e) porque l´ım x→ 3 g(x) , 0 ︷︸︸︷ =
l´ım x→ 3 f (x)
l´ım x→ 3
g(x)
�
� Ejemplo 4.4 — Cálculo de límites con las propiedades algebraicas. Sabiendo que l´ım x→ 1
f (x) = 0 y l´ım x→ 1
g(x) = 2 calcularemos
l´ım x→ 1
f (x).g(x) f (x) + g(x)
Lo primero que analizamos, para poder usar la propiedad e), es la existencia del límite del denominador y si vale cero o no.
l´ım x→ 1
[ f (x) + g(x)]
a) ︷︸︸︷ = l´ım x→ 1
f (x) + l´ım x→ 1
g(x) = 0 + 2 = 2
∗ ︷︸︸︷ , 0
Por lo tanto, podemos usar la propiedad e) en el límite del enunciado
14 Capítulo 4. Derivadas.
l´ım x→ 1
f (x).g(x) f (x) + g(x)
e) y ∗ ︷︸︸︷ =
l´ım x→ 1
f (x).g(x)
l´ımx→ 1 f (x) + g(x)
d) ︷︸︸︷ =
[
l´ım x→ 1
f (x)
]
[
l´ım x→ 1
g(x)
]
�
Figura 14: Gráfica de las funciones f y g.
Actividad 4.9 Usando las propiedades de límites y los gráficos de las funciones f y g que se encuentran en la Figura 14 , calculen los siguientes límites (si es que existen). a) l´ım x→− 2
[ f (x) + 5 g(x)] b) l´ım x→ 1
[ f (x)g(x)] c) l´ım x→ 2
f (x) g(x) + 1 �
Si usamos la propiedad del producto repetidas veces se tiene la siguiente propiedad.
Propiedad 4.2 Para n un número entero positivo. Si existe l´ım x→a f (x) entonces
l´ım x→a [ f (x)]n^ =
[
l´ım x→a f (x)
] (^) n
Otra propiedad, similar a la anterior, pero relacionada con las raíces es
Propiedad 4.3 Para n un número entero positivo. Si existe l´ım x→a f (x) entonces
l´ım x→a
√ n (^) f (x) = √n^ l´ım x→a f (x)
En el caso que n sea par se necesita agregar las condidiones adicionales para que las operaciones estén definidas. Debe ser f (x) ≥ 0 y l´ım x→a f (x) ≥ 0.
Por último, dos límites especiales
Propiedad 4. l´ım x→a c = c l´ım x→a x = a
Los límites de la proposición anterior resultan muy sencillos de analizar desde el punto de vista intuitivo y usando el desarrollo del inicio de la sección. Pueden decirse en palabras o realizar las gráficas de las funciones y = c e y = x.
� Ejemplo 4.5 — Cálculo de límite para una función polinómica. Calculemos el l´ım x→ 5 ( 2 x^2 − 3 x + 4 ). Desarrollamos aplicando las propiedades de la suma, resta, potencias y multiplicación por una constante dado que todos los límites involucrados existen según la Propiedad 4 .4.
l´ım x→ 5 ( 2 x^2 − 3 x + 4 ) = l´ım x→ 5 2 x^2 − l´ım x→ 5 3 x + l´ım x→ 5
= 2 l´ım x→ 5 x^2 − 3 l´ım x→ 5 x + l´ım x→ 5
4 = 2 ( 5 )^2 − 3 ( 5 ) + 4 = 39.
�
16 Capítulo 4. Derivadas.
�
Propiedad 4.5 — Funciones polinomiales y funciones racionales. Si f es una función polino- mial o una función racional y a pertenece al dominio de f , entonces
l´ım x→a f (x) = f (a) ( 2 )
� Ejemplo 4.8 — Cálculo de límites para funciones polinomiales y racionales. Podemos calcular
(x^3 − 3 x + 2 ) = 13 − 3. 1 + 2 = 1 − 3 + 2 = 0
x − 3 x
dado que 8 pertenece al dominio de x − 3 x �
Por último, como ya hemos ejercitado en el Ejemplo 2 .1 en el que trabajamos con la función
f (x) =
x^2 − 1 x − 1
vemos que
l´ım x→ 1
x^2 − 1 x − 1
= l´ım x→ 1
(x − 1 )(x + 1 ) x − 1
= l´ım x→ 1
(x + 1 ) = 1 + 1 = 2.
Es decir, pudimos calcular el valor del límite usando una función más simple, g(x) = x + 1. Esto es válido porque f (x) = g(x) para todo x , 1. Y para calcular el límite x −→ 1 no se debe considerar x = 1. En general, tenemos el siguiente resultado:
Propiedad 4.6 — Siimplificación. Si f (x) = g(x) para x , a, entonces
l´ım x→a f (x) = l´ım x→a g(x), siempre que alguno de los dos límites exista.
� Ejemplo 4.9 — Cálculo de límite por simplificación.
Calculemos el l´ım x→ 1
g(x) para g(x) =
x + 1 si x , 1
π si x = 1
Aquí vemos que g está definida en x = 1 y g( 1 ) = π, pero el valor del límite cuando x
5 La derivada como un límite. 17
tiende a 1 se deben calcular con g(x) = x + 1 porque se considera x , 1 ,
l´ım x→ 1 g(x) = l´ım x→ 1 (x + 1 ) = 2.
�
� Ejemplo 4.10 — Cálculo de límite por simplificación.
Calculemos ahora l´ım h→ 0
( 3 + h)^2 − 9 h
Si definimos f (h) =
( 3 + h)^2 − 9 h
no podemos calcular el l´ım h→ 0 f (h) evaluando f ( 0 ) porque la función no está definida en h = 0. Pero si trabajamos algebraicamente la función, llegamos a que
f (h) =
( 3 + h)^2 − 9 h
9 + 6 h + h^2 − 9 h
6 h + h^2 h
h( 6 + h) h = 6 + h,
si h , 0. (Recordemos que sólo consideramos h , 0 cuando h tiende a 0 ). Luego
l´ım h→ 0
( 3 + h)^2 − 9 h = l´ım h→ 0 ( 6 + h) = 6.
�
Actividad 4.12 Calculen los siguientes límites aplicando la Propiedad 4 .6 de simplificación.
a) l´ım x→ 2 (x + 1 )
x^2 + x − 6 x^2 − 4
b) l´ım x→ 3
x^3 − 27 x − 3
c) l´ım x→ 1 +
x − 1 √ x − 1
d) l´ım y→− 1
y^2 + 8 − 3 y + 1 �
5 La derivada como un límite.
Usando la definición de límite podemos recordar la definición de pendiente de la recta tangente a la gráfica de una función y de velocidad instantánea de una función de la siguiente manera:
� Definición 5.1 — Cociente incremental. Dada una función f definida en un intervalo abierto (c, d). Dados a y x en (c, d), dos números reales distintos dentro del intervalo, se denomina cociente incremental de f en el intervalo [a, x] al cociente
f (x) − f (a) x − a
∆ f ∆x
= Vprom[a, x] ( 3 )
El cociente incremental de f en el intervalo [a, x] representa la velocidad promedio de f en el intervalo [a, x] o la pendiente de la recta secante entre los puntos de abscisa a y x. También se denomina variación promedio de f en el intervalo [a, x].
� Definición 5.2 — Pendiente de la recta tangente - Velocidad instántea. Dada una función f definida en un intervalo abierto (c, d). Dado a ∈ (c, d), un número real dentro del intervalo, se define la pendiente de la recta tangente a la gráfica de f en el punto (a, f (a)) como el número real ma (en el caso que exista) determinado por el valor
5 La derivada como un límite. 19
Tengan presente que siempre se cumple que
Dom( f ′) ⊆ Dom( f )
O sea, en cualquier caso, el dominio de la función derivada es un subconjunto del dominio de la función. No puede ser más grande.
� Definición 5.3 — Función derivada. Dada f una función cuyo dominio es algún intervalo abierto (c, d). Se define como derivada de f a la función definida por la regla
a 7 −→ ma
Existen varias formas de escribir a la función derivada. En este curso usaremos las siguientes notaciones f ′^ =
df dx
f ′(a) =
df dx
(a) = ma
Si la variable independiente se denota por la letra x entonces se dice que es la derivada de f respecto a x. En este caso el dominio de la función f ′^ está formado por todos los valores en el dominio de f para los cuales existe el límite del cociente incremental 3.
Si la función f admite derivada en x 0 se dice que f es una función derivable en x 0.
En el caso de f (x) = x^2 + 2 hemos calculado previamente en 5 que ma = 2 a por lo tanto
f ′(a) = 2 a.
El Dom( f ) y el Dom( f ′) son ambos iguales a R (el límite del cociente incremental existe para cualquier valor de a).
C Hacemos algunos comentarios respecto a la notación que se usa y usaremos con las derivadas. Por un lado, en la notación df dx la variable que figura en el denominador hace referencia a la variable independiente de la función cuyo nombre está en el numerador.
df dx = variable dependiente variable independiente
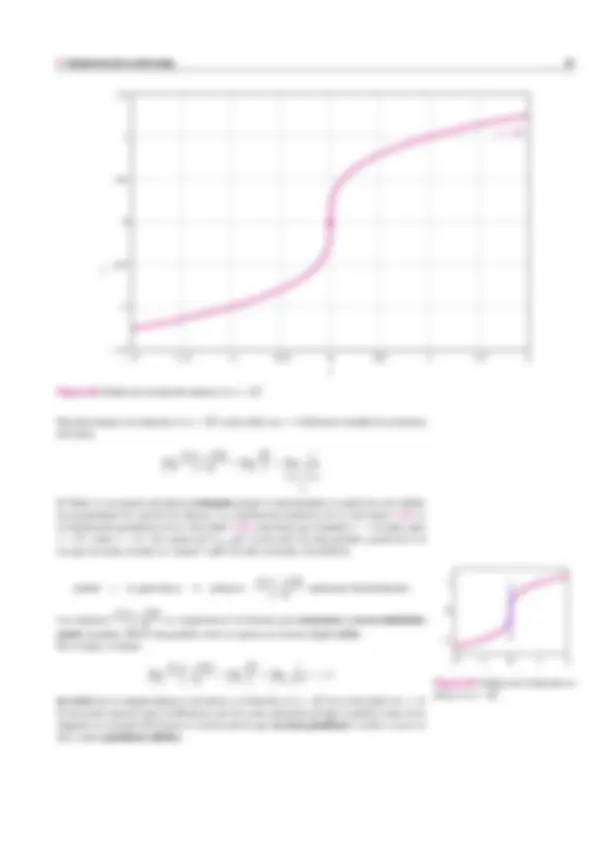
Actividad 4.13 Para un mol de oxígeno a 26 ◦^ C, la presión P y el volumen V se relacionan mediante la ecuación P =
V
donde P se mide en atmósferas y V en litros. a) Encuentren la derivada de P respecto a V. b) ¿Cuánto vale P′( 1 )? �
5.1 Sobre las unidades de f ′.
En general se tiene que si
l´ım x→a f (x) = L
entonces las unidades de L son las mismas que las de f (x).
Por lo tanto, las unidades de f ′^ serán las mismas que tiene el cociente incremental al cociente incremental ∆ f ∆x
unidades de f unidades de x
20 Capítulo 4. Derivadas.
- Si f (t) es la distancia en metros y t es el tiempo en segundos entonces las unidades de f ′(t) (la velocidad) serán metros/segundo.
- Si f (x) es la presión en atmósferas (atm) y x es la altitud en km entonces las unidades de f ′(x) (usualmente llamado gradiente de presión) serán atm/km.
- Si f (t) es el tamaño de una población en individuos y t es el tiempo en años entonces las unidades de f ′(t) (tasa de crecimiento) serán individuos/año.
5.2 Definición equivalente para f ′(a). La noción de derivada está asociada al valor del límite de las velocidades promedio calculadas en el intervalo [a, x]. Usando la notación de ∆ f y ∆x los siguientes cocientes incrementales son equivalentes considerando que ∆x = x − a.
eje x
a x ←−
∆x = x − a
eje x
x a −→
∆x = x − a
f (x) − f (a) x − a
f (a + ∆x) − f (a) ∆x
De modo que la derivada, en el caso de que exista, queda determinada por df dx
(a) = l´ım x→a
f (x) − f (a) x − a
= l´ım ∆x→ 0
f (a + ∆x) − f (a) ∆x
La equivalencia x → a ⇐⇒ ∆x → 0 es esencial en este desarrollo. Decir que x tiende a a es equivalente a decir que la diferencia x − a tiende a 0.
Para resolver las Actividades 4.14 y 4.15 pueden ser útiles las siguientes igualdades algebraicas
b^2 − a^2 = (b − a)(b + a)
b^3 − a^3 = (b − a)
b^2 + ab + a^2
b^4 −a^4 = (b−a)
b^3 + b^2 a + ba^2 + a^3
¿Cómo es la expresión equivalente para (bn^ − an)?
Donde hemos considerado la equivalencia: x → a ⇐⇒ ∆x → 0.
Actividad 4.14 Usando la expresión
l´ım x→a
f (x) − f (a) x − a
calculen f ′(a) para los valores de a ∈ Dom( f ).
a) f (x) = 4 x^3 b) f (x) = 7 x − 3 c) f (x) = 5 d) f (x) =
x^2 �
Actividad 4.15 Usando la expresión
l´ım ∆x→ 0
f (a + ∆x) − f (a) ∆x
calculen f ′(a) para los valores de a ∈ Dom( f ).
a) f (x) = 1 − 5 x b) f (x) =
x
c) f (x) = πx^4 d) f (x) = π^2 �
6 La función derivada.
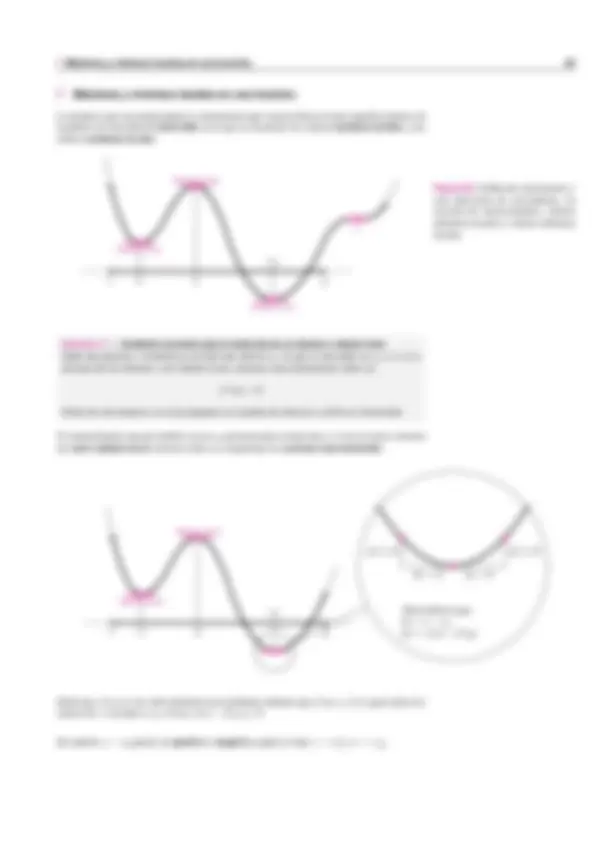
El estudio de las funciones que intervienen en los modelos matemáticos se apoya muchas veces, y en primera instancia, en construcciones gráficas. Ingenuamente, en ocasiones, realizamos construcciones con tablas de valores con 5 o 6 datos (10 datos quizás) conectando los puntos con una curva suave. Otra veces, mediante softwares graficadores podemos realizar construcciones gráficas extremádamente sofisticadas. Sin embargo, estas dos metodologías pueden ser insatisfactorias en algunas situaciones; por varias razones.
- Primero, ¿cómo sabemos que la unión de algunos puntos en un gráfico nos producirá la forma real de la curva?
- En segundo lugar, ¿cómo podemos saber dónde están las características relevantes del gráfico?
- Y tercero, ¿cómo podemos estar seguros de que no nos hemos perdido nada?