¡Descarga Accionamientos eléctricos y más Apuntes en PDF de Centrales Eléctricas solo en Docsity!
CHAPTER 3
SPEED CONTROL OF DC MOTORS
3.1 BASIC PARAMETERS
Electric motors are used to drive loads of varying characteristics. Precise speed control of electric motors in either direction or their constant speed operation under varying load conditions is required in different applications in industries, electric traction and machine tool, etc. to attain a high rate of production, high quality of products and at the same time to achieve economy in production. A few examples are cited to illustrate the importance of speed control. Speed control of motors in steel mills is required to a high degree of accuracy in order to avoid sag between the stands. In metal cutting machine tools, the speed of the drive is set and adjusted depending upon the quality of metal to be cut and the tool to be used. In a paper mill, the weight per unitarea of paper is determined by the speed of the machíne. The following basic features govern the design of speed control of an electric motor: Range of speed control. This is expressed as the ratio of a)max/aJrin = D, i.e. 2:1, 4:1,10:1, etc. For metal cutting machine tools, D ranges from 4:1 to 100:1 and-even more. Depending upon the diflerent grades of paper in paper mills, D lies between 3:1 to 20:1.
Smoothness of speed control. It depends upon the number of steps of the starting resistor over the
dcsired range of speed control. The more the number of steps, the smoother would be the speed control. The quality of products depends upon the smoothness of speed control. Econoinic justifiability. The method of speed control has to be efficient in terms of cost and cncrgy. Besides these, the reliability and availability of different components and parts need to be taken into account as well. Stability of operation. It depends upon the hardness of the speed-torque characteristics. If the characteristics are drooping excessively, i.e. having less hardness, the operation tends to be unstable, bccause drooping characteristics, for a small change in load torque, cause a large change in the speed of the motor. Direction of speed control. It means whether the speed is controlled below or above the base speed, which is defined as rated speed with rated voltage and full-field excitation. For example, with armature voltage control of a dc shunt motor, the speed can be controlled only in the downward direction with respect to base speed, whereas with field control method, the speed can be controlled t)nl,y in the upward direction with respect to base speed. Permissible load at different speeds. Speed control is related to load torque. In a fan or pump ilri'e. the load torque varies as the square of the speed. For speed coiitrol of induction motor driven
60
Speed Control of DC Motors 61
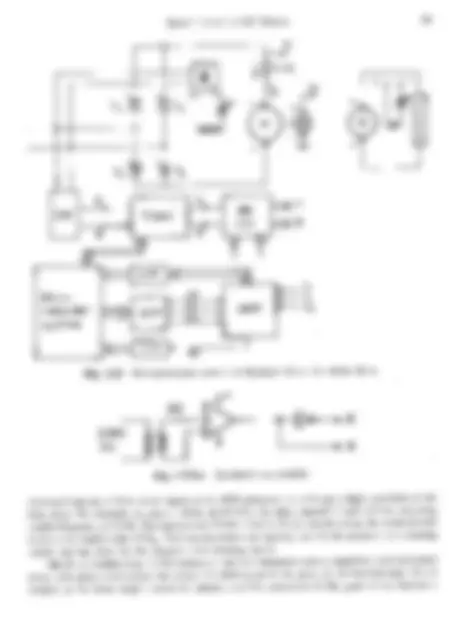
pumps or fans, speed control by voltage variation using ac regulators is the most suitable method. In many applications, speed control is required at constant torque. The drives used in cranes, hoists, rolling mills, paper mills, etc. may be cited as examples. On the other hand, in metal cutting lathes or wheel and axle plants, for example, speed control is required at constant horsepower. Constant ]inear speed (peripheral speed) and force between the job surface and the cutting tool are the pi.erequisites for smooth and uniform cutting. As the diameter decreases, the speed increases too. Precise speed control at constant horsepower needs to be achieved. It is important to determine that the motor capacity is being properly uti]ized during the complete range of speed control. This can be checked in two ways: by verifying whether the motor is running (a) with rated current, and (b) at constant horsepower throughout the range of speed control. It may be taken into consideration that the cooling conditions deteriorate at low speeds for self-ventilated fan cooled motors. The cbnstant torque and constant horsepower operations have been illustrated in Fig. 3.1. In dc shunt motors, constant torque operation takes place during speed control below rated speed (base speed) by armature voltage control, while constant horsepower operation takes place during speed control above rated speed (base speed) by excitation control.
Fig. 3.1 Typical torque-speed and power-speed characteristics of dc shunt motor6 for the two zones of operation.
The maximum pemissible torque will differ with the different methods of speed control. It is
the amount of torque that the motor can deliver instantaneously without damage to mechanical
parts, commutator and brushes.
3.2 SPEED CONTROL 0F DC SHUNT MOTORS
The speed-torque characteristics of dc shunt motors have been described in Chapter 2. The speed equation of a dc motor is given by
0- V^ -Ia(r(, +^ R,-I;)_
K¢
(3.1 )
Speed Control of DC Motors 63.
excitation of the dc generator and thercby` the polarity of its dc voltage. The speed control can be effected in two ways:
(1) Constant torque operation by armature voltage control for speeds below base speed. (2) Constant horsepower operatiop by field (excitation) control for speeds above base `speed The operating characteristics are shown in Fig. 3.]. The field excitation is kept at maximum value during armature voltage control as it gives maximum torque per unit armature current (ampere). For field excitation control, torque per ampere is reduced to maintain constant horsepower. The range of speed control is normally from 6:1 to 8:1 for motors of medium capacity. The rangc can be increased to 12:1-16:1 by varying the field excitation of the controlled motor. Thc upper limit of the speed is restricted by commutation difficulties, whereas the lower limit is restrii)ted by residual magnetism. It may be noted that, if the field excitation of the dc generator is varied from negative maximum to positive maximum and then back from positive maximum to negative maximum, then the corresponding plot of speed variation with generator field excitation is a hysteresis loop. Full torquc is available at any speed. The motor crawls particularly at light loads due to residual magnetism. This crawling is prevented by reducíng the effect of the residual magnetism in the following two Ways: (1) By connecting a differential winding across the armature ierminals of the generator. (2) By ionnecting the field winding of the generator across the armature terminals so as to oppose thc residual magnetism. This is called the 5'ztjc¿.cJ€ connccf¿.o#.
Advantages
The advantages of the Ward-Leonard drive are: (a) It has inherent regenerative braking capacity. (b) A wide range of speed control of the dc motor is obtained jn either direction. (c) The lagging reactive volt-amperes of a plant can be neutralized, by using an over-cxcited synchronous motor. The overall power factor of the plant also improves. (d) When the load is intermittent as in rolling mills, the drivc motor used is an induction motor with a flywheel mounted on its shaft to smooth out the intermittent loading to a low va]ue. This has been described in Section 5.6. The M-G set provided with a flywheel is known as llgner set. The synchronous motor is not suitable for intermittent loading because of its constant speed characteristic.
Disadvantages
The disadvantages of tl-ie Ward-Leonard drive are:
(a) Hgh initial cost and low efficiency because or an additional M-G set. (b) Costly foundation and more floor area are required. (c) The drive próduces noise and requires frequent maintenancc. Nowadays, statíc Ward_Leonárd dríves. usíng two thyrístor brídge rectífiers tconverters, connected back to back (described in Section 3.4.3), are used to eliminate the above drciwbacks.
64 Electric Dríves
More precise and smooth speed control over a wide range such as 200:1, and even higher, is accomplished in which there are no sources of noise and vibration. In such an adjustable voltage system, harder torque-speed chara`.?teristics can be obtained by providing !.arfl compensation. Soft starting can also be incorporated. Non-electrical prime movers can be used to drive the dc generator of the Ward-Leonard drive. For example, in diesel electric locomotives and ship propulsion drives, the generator is driven by a diesel engine or a gas turbine. Examples of applications are rolling mills, paper mills, mine hoists, etc.
3.2.2 Buck-boost control
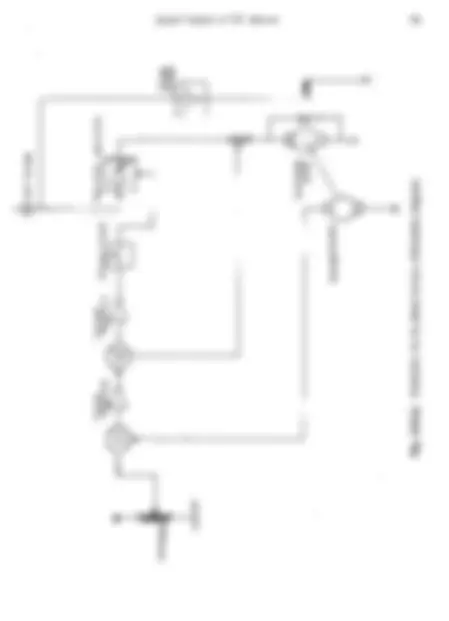
ln this method, a variable voltage generator (Buck-boost), driven by a constant speed motor, is connected in series with the dc supply. The schematic connection diagram is given in Fig. 3.3.
Fig. 3.3 Schematic diagram of Buck-boost method of speed control of dc shunt motors.
At starting, the generator is excited in a direction such that its output voltage is in series buck with the dc supply. The potentiometer is adjusted such that the permissible starting current flows through the armature of the controlled dc motor, whose speed depends upon its field excitation (current) and hence, the output voltage of the generator. As the field current is decreased with the help of the potentiometer, the bucking voltage of the generator decreases too and the net voltage appearing across the motor increases, thus increasing its speed. When the excitation current of the generator is reduced to zero, the motor runs at ha]f the rated (base) speed. Beyond this point (mid- point of the potentiometcr), the field current is increased in the opposite direction. The polarity of the generator now reverses, connecting it in series boost with [he dc supply. The rated (base) speed Ís obtained, when the booster voltage is -increased by adjustment of its excitation curreni with the help of the potentiometer such that ratcd voltage is applied across the motor. The motor field excitation is always at rated value. Beyond the rated (base) speed, the motor speed is controlled by variation of field excitation. The speed control takcs place in two modes: (a) armature vo]tage control, and (b) field excitation (curi€nt) control. The relevant performance characteristics are described in Section 3.2.1. Thus, buck-boost control is siinilar in principle to Ward-Leonard control with the advantagcs and disadvantages bejng nc¿irly the same. However, the scheme is economical because of the reduced size of the M-G set.
66 Electríc Dríves
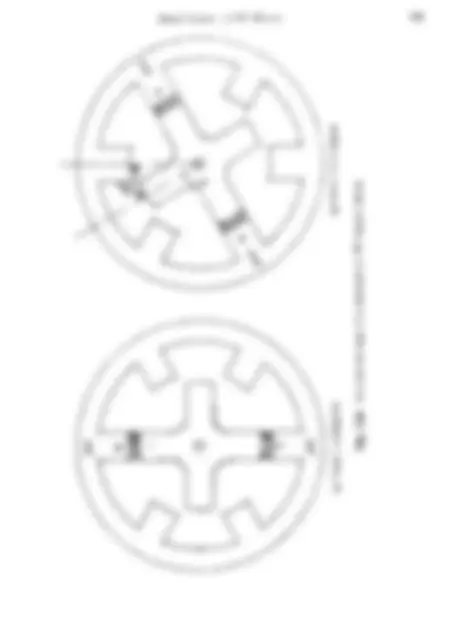
(a) Series connection.
(b) Parallel connection.
Total [urrent , I = (c) Total characteristics of a pair of series motors. Fig. 3.4 Series-parallel control of a pair of dc series motors.
Speed Control of DC Mo{ors
Torque = +
(b)
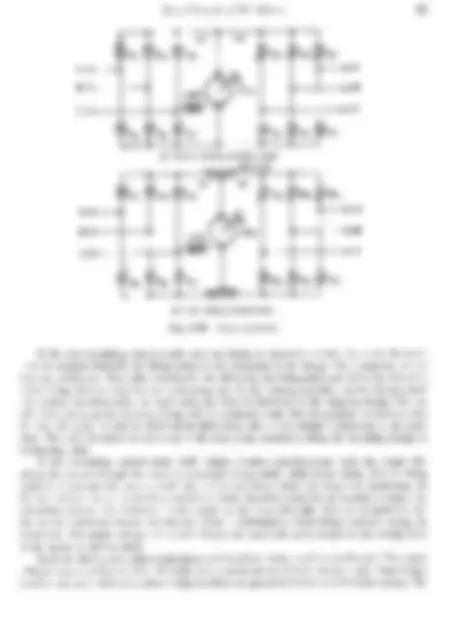
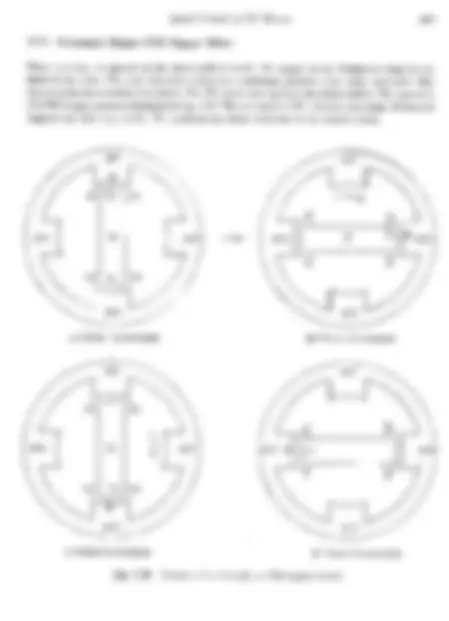
(c) Fig. 3.5 Circuits and speed-torque characteristics of dc series motors used in cranes: (a) Circuit for motor (hoist) operation; (b) Circuit for dynamic (emergency) braking during lowering; (c) Speed-torque characteristics for dynamic braking.
Dynamic braking during lowering
The lowering speed can be controlled suitably, if the armature and field circuits are connected in
parallel as shown in Fig. 3.6 instead of in series. The series motor acts as a separately excited generator, while the load on the hook overhauls it under the influence of gravity. E is negátive undi`i. this condition. The current will flow in the same direction as during motoring. Dynamic braking torque is produced.
Fig. 3.6 Circuit connections of a dc series motor in a crane for lowering using dynamic braking.
The armature current-voltage relationship can be expressed as
- E = V + Ia (R-mt + Re*`) (^) (3.3)
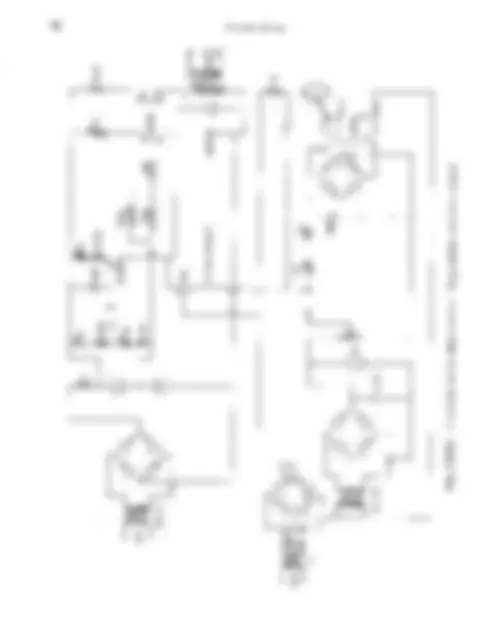
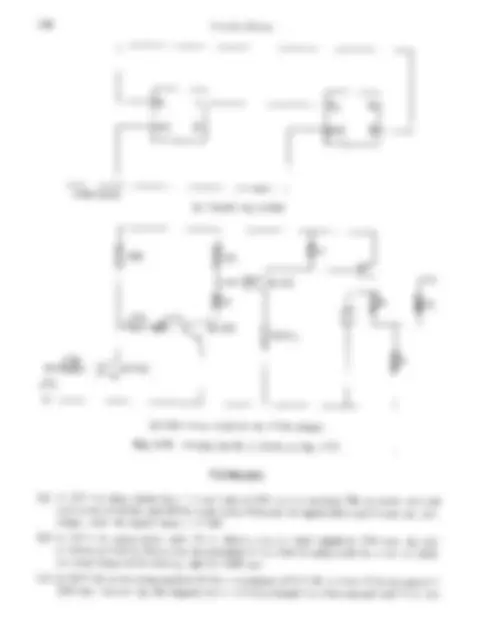
Fig. 3.9(a) Circuit of a dc series motor used in cranes for lowering during dynamic braking using Rex\1 Rf tind Rs. -Torqu.-- OT
Ba,
Ft€xt = Rs = constant Rfi Rf=variablc
uC1m'^ Rfz
Rf
Rfi > Rfz > Rf
Fig.3.9(b)Speed-torquecharacteristicsofthedcseriesmotorofFig3.9(a)forvariousvaluesoffield circuit resistance.
The armature resistance control for dynamic braking during lowering is not suitable for constant speed operation. The speedLtorque characteristics are further modified by connecting a third rheostat in series with both the field and armature circuits as shown in Fig. 3.9a. This type of connection has considerable applications in dynamic braking lowering control of crane hoists. The speed-torque characteristics are shown in Fig. 3.9b.
Example 3.
A 400 V dc shunt motor takes 110 A and runs at 900 rpm and provides 35 kw of power to a mechanical load in the rated condition. The armature and field resistances of the motor are 0.18 Q and 140 Q, respectively. Compare the efficiencies of the motor at 500 rpm at rated torque and 1500 rpm at rated power.
Solution
V=400V, /=110A, Ji/=140Q, Rfl=0.18r2, N[=900rpm At rated condition
Output power Pw = 35 kw
lnput power P„ = V/ = 400 x 110 = 44 kw
Efficiencw=#-#=07955=79.55%
70 Electric Drives
Fieldcument/„=#=#=2857A
Armature current /fl = J -J/] = 110 -2.857 = 107.143 A Armature copper loss = /fl2Ra = (107.143)2 X 0.18 = 2.066 kw Field copper loss = Vr,] = 400 x 2.857 = 1.143 kw Constant (core and rotational) 1osses = P, -Po -Jfl2Jia -VJ,i = 44 -35 -2.066 -1.143 = 5.791 kw
Angular speed a)] = 2z¥ = 2" x 900
= 94.25 rad/s
Shaft (rated) torque r[ = fii = ÉíÍJ£i = 37i.35 N. m
a)i 94. (a) At N2 = 500 rpm wjth rated torque
Angular speed ú2 = 277 X 500 60
= 52.36 rad/s
Output power P„ = @2r] = 52.36 x 371.35 = 19.444 kw Armature current Jfl remains constant, as flux ¢[ or field current /,] is constant. |nput power P,. = Output power + Armature copper loss + Field copper loss + Constant losses = 19.444 + 2.066 + 1.143 + 5.791 = 28.444 kw
Efficienc" = i# = 0.6836 = 68.36%
(b) At N3 = 1500 rpm with rated power
Output power Po3 = 35.0 kw
Armature current /a remains constant.
Neglectingsaturationw+±,J„=#/„=É£%x2.857=1.714A
Field copper loss = V/,3 = 400 X 1.714 = 0.686 kw
lnput power P,.3 = 35.0 + 2.066 + 0.686 + 5.791 = 43.543 kw
Efficienc" = íg = 0.8038 = 8038%
Elec{ric Drives
r3=irl
0 .66&] x (.1 3) (,1)
0 .666] x (| 3)
(120)
120
J2xO.666]
= 103.9 A
+e3 = o.6667 x to3.9 = 69.27 A Eb3 = Vi -/37.fl -Jjc3r„ = 500 -(103.9 X 0.11) -(69.27 X 0.04) = 485.8 V
Eb3/f¿,i „ 485.8xl20x N 3 = _no 3 _ T` C L N + __ Ebilse3 L 482X69.2]
= 1397 rpm
Therefore
Or
Therefore
(c) T4= O.]5TL
Or
l_É r, J
Therefore
/42 = 0.75 x (|20)
0r
/4 = 103.9 A R = r„ + rfl + R,./7 = 0.04 + 0.11 + 1.0 = 1.15 Q TTierefore E/,4 = Vi -J+R = 500 -(103.9 x 1.15) = 380.5 V Hence
N4= Eb4/LwiNl-^ „^ 380.5xl20x Ebi JTc4 482 x l03.
= 729 rpm
Examp]e 3.
Two dc series motors with different air gaps, but otherwise identical, run at 700 and 750 rpm. respectively, when taking 50 A at 500 V. The total resistance of each motor is 0.36 Q. If the motors
Speed Contr()l of DC Motors 73
are mechanically coupled, and connected in series to a 500 V supply and take a current of 50 A, ca]culate:
(a) the speed at which the set will run, and (b) the voltage across each machine.
Solution
V=500V, /=50A, r„,=0.36Q, N[=700rpm, N2=750rpm
ú)1= zm _ 27t X 700
= 73.3 rad/s, o. = 277 x 750
= 78.54 rad/s
When the motors are running independently, we have
Ebi = Eb2 = V -/flrm = 500 -(50 X 0.36) = 500 - 18 = 482 V
K¢[=#=#=6576V.s/rad
K¢2=#=6.137V.s/rad
Now
Eb = K¢ cO
(a) Assume that the set will run at the speed N3, when mechanically coupled. The voltage across machine 1, Vi = Ebi + /arm = 6.576 ú)3 + 18 The voltage across machine 2, V2 = 6.137 a)3 + 18
Now
V= V1 + V
Therefore
(6.576 + 6.137)aJ3 + 36 = 500
0r
C03=^ 500 - 36
N3=
6.576 + 6.
= 36.5 rad/s
É9± = 60 x 36.
2 T, 2T[
= 349 rpm
Therefore
(b) V[^ =^ (6.576^ x^ 36.5)^ +^18 =^ 258.0^ V V2 = V - Vi = 500 - 258.0 = 242.0 V
Example 3.
A 240 V dc series motor has an armatui.e resistance of 0.42 Q and a series field resistance of 0.18 f2.
Speed Coii[rol of DC Motors 75
3.4.1 Thyristor Bridge Rectifier Circuits
Single-plmse half-controlled bridge rectifier
The single-phase full-wave half-controlled bridge rectifier (converter) with dc motor load is shown in Fig. 3.1 la. The first type (Fig. 3.11a(i)) uses two thyristors and three diodes, one of them being, a freewheeling (FWD) one, while the second type (Fig. 3.1 la(ii)) has two thyristors and two diodes', to be also used in freewheeling mode. This type is suitable for one quadrant operation, with the output voltage being positive and the current in the thyristor unidirectional. The thyristors are fired once in each cycle, 7T] in positive half and r2 in negative with delay angle, t¥, The voltage arid current waveforms with dc motor load ¿ire shown in Fig. 3.11b. The current is continuous for low values of firing delay angle cr and high ]oad torque, while the current is discontinuous for large
r: r{®r\ r
\ \ \ \
(b) Voltage and current waveforms for continuous load current. Fig. 3.11 Single-phase ful]-wave half-controllcd bridge rectifier (converter).
76 Electric Drives
values of delay angle c¥ and low load torque. The thyristor 7T] conducts from cr to 77, and then the l`reewheeling action takes place from 77 to (7r + c¥). This is repeated for the negative half with r2 in place of 7']. The output voltage with continuous current is
Vt,t =0.9 V(1 +cos c¥) for 7T> cy>0 (^) (3..4)
Single-phase fuu-controlled bridge rectifier
The single-phase full-controlled bridge rectifier with four thyristors is shown in Fig. 3.12a alon'g with continuous voltage and current waveform for motoring action (Fig. 3.12b). This circuit i; suitable for two-quadrant operation as the output voltage can be both positive and negative, the current in the thyristors being unidirectional. The output voltage with continuous current is
Vdc=0.9 VCoS C¥ for7r> cr>
(a) Power circuits with dc motor load.
IIIEIII
= (b) Voltage and current waveforms for continuous load current. Fig. 3.12 Single-phase t`ull-con[rolled bridge rectifier.
(3.5)
(^78) Elec{ric Drives
similar to the case of the single-phase type. The thyristors are fired at delay angle c¥ from the natural commutation, while the diodes are naturally commutated. The voltage waveform is continuous for c¥ < #/3 and discontinuous for c¥ > 7r/3. The output voltage (with continuous current) is Vdc= 1.35 V,.(1 +cos cr) for7r> a>0 (3.6) Figure 3.13b(i) shows the voltage waveform for the diode bridge or thyristor bridge for c¥ = 0°, wher.c the thyristor rí is fired at 0 = 60° with thyristor r[ and diode D6 conducting (r5 going off) for 60° when commutatíon occurs from D6 to D2. At 0 = 180°, the thyristor, r3 is fired with r] going off. If c¥ = 90°, r] is fired at 0 = 150°, with 7[ and D2 conducting for 90°(9 = 240°), when freewheeling diode (FD) takes over, as the instantaneous voltage goes negative. r3 is fired at 270° with r3 and D+ conducting. This is shown in Fig. 3.13b(ii).
Three-phase full-controlled bridge rectifier
A three-phase full-controlled bridge rectifier with six thyristors is shown in Fig. 3.14a along with waveforms (Fig. 3.14b). The thyristors are fired in sequence with delay angle cL with each thyristor
(a) Power circuits with dc motor load.
o( = 0. T6T'
0 tT/ 1"
2íT / 3 tT 4tí/3 5TT/ 3 2TÍ -0=ut
(ii) =e=ut (b) Voltages: (i) cr = 0°, (ii) cÍ = 60° and current (cr = 60°) waveforms for continuous load current. Fig. 3.14 Three-phase full-controlled bridge rectifier.
Sp£ed Conirol of DC Mo[or.s 79
ionducting for angle 120°. Two thyrístors conduct at a time. When thyristor, r[ is triggered, the thyristors 7T] and r6 start conducting, with thyristor r5 going off. Prior to this, the thyristors r5 and 76 are conducting. When iiiyristor r2 is triggered after a delay of 60° from the instant T[ is triggered, the thyristors, r[ and r2 start conducting, with thyristor, ró going off. This sequence is repeated at an interval of 60°. The output voltage is positive for cr < 7r/2, ar,d negative for cÍ > 7J/2. The output voltage with continuous current is Vdc= 1.35 V£cos cr for7[> cr>0 (3.7) The current is mostly continuous, except for large delay in motoring mode, but can be discontinuous in braking mode. In all cases, thcse circuits are used for armature voltage control to change the speed of dc shunt motors, whi]e the field is fed from a diode bridge. These bridge circuits are used for high power drives. As the {hyristors conduct for about one-third of the cyc]e, the average current in the thyristors is less than rated motor current.
3.4.2 Chopper circuits
Step-down chopper The simple chopper can be explained by means of a switch as shown in Fig. 3.15a. When the switch is ON, the output voltage appears across the load. If the switch is made OFF after time roN, the
(a) Motoring mode. (^) (b) Braking mode. Fig. 3.15 Chopper circuits.
current through the load freewheels through the diode (FWD). The output voltage is zero during the time roFF. The total time period is given by T = roN + roFF. The average output voltage is
V4c=V,¥=W forc¥<1 (3.8)
Thus, by keeping time period r or chopping frequency / = l/r constant and varying roN (r > roN > 0), the average output voltage can be varied. The roN period can be varied from 10% to 90% of time period r. This type of chopper is also called the step-down chopper, as V„ < V`f. In this case, the load has been assumed to be inductive with or without any back emf. In certain cases, roFF is kept constant and only roN is varied, thus varying time period r or chopping frequency /. The chopper switch, in earlier days, used a thyristor, which required an additional thyristor to switch it off. Nowadays, a GTO is used, which can be turned off through its gate. Also, a power transistor or power MOSFET can be used instead. The chopping frequency is increased, when a power transistor/MOSFET is used.