



1
Control PID y su aplicación en la
Automatización










Prepara tus exámenes y mejora tus resultados gracias a la gran cantidad de recursos disponibles en Docsity

Gana puntos ayudando a otros estudiantes o consíguelos activando un Plan Premium

Prepara tus exámenes
Prepara tus exámenes y mejora tus resultados gracias a la gran cantidad de recursos disponibles en Docsity
Prepara tus exámenes con los documentos que comparten otros estudiantes como tú en Docsity
Encuentra los documentos específicos para los exámenes de tu universidad
Estudia con lecciones y exámenes resueltos basados en los programas académicos de las mejores universidades
Responde a preguntas de exámenes reales y pon a prueba tu preparación
Consigue puntos base para descargar
Gana puntos ayudando a otros estudiantes o consíguelos activando un Plan Premium
Comunidad
Pide ayuda a la comunidad y resuelve tus dudas de estudio
Ebooks gratuitos
Descarga nuestras guías gratuitas sobre técnicas de estudio, métodos para controlar la ansiedad y consejos para la tesis preparadas por los tutores de Docsity
Apunte sobre qué es y cómo funciona el control PID y cuáles son sus principales beneficios para la aplicación automatizada de sistemas.
Tipo: Apuntes
1 / 45

Esta página no es visible en la vista previa
¡No te pierdas las partes importantes!
Contenidos
PID.
Definición.
Estructura del controlador P, PI y PID.
Sintonización.
Aplicaciones.
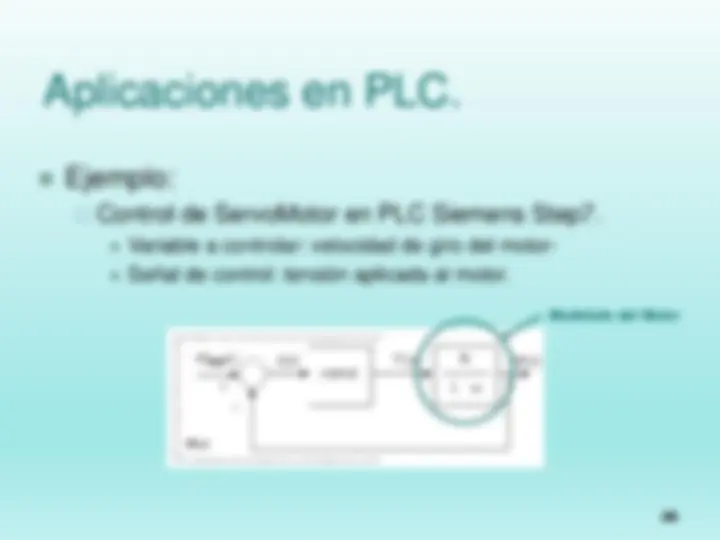
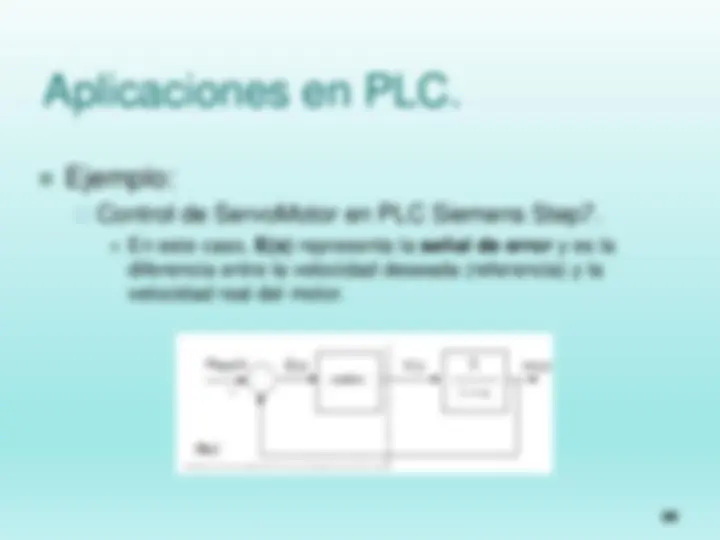
Aplicación en PLC.
Dispositivos PID Industriales.
Introducción
Introducción
Control Proporcional (P)
Se entrega una constante como función de
transferencia para el controlador P, denominada
Ganancia Proporcional (Kp).
Kp E s
U s C s ( )
( ) ( )
Control Proporcional (P)
De esto se puede desprender:
Cualquiera sea el mecanismo de actuación, el
controlador P es en esencia un amplificador de
ganancia ajustable.
Un controlador P puede controlar cualquier planta
estable, pero posee un desempeño limitado y error en
estado estacionario.
Se presenta la relación entre la actuación u(t) y
la señal de error e(t) :
t
0
Control Integral (I)
Además de la función de transferencia
correspondiente, Con una ganancia denominada
Ganancia Integral (Ki).
s
K
E s
U s C s
i ( )
( ) ( )
Control Derivativo (D)
La relación entre la salida del controlador
(actuación u(t) ) y la señal de error e(t), es una
derivada.
dt
de t u t K d
( ) ( )
Control Derivativo (D)
Además de la función de transferencia
correspondiente, Con una ganancia denominada
Ganancia derivativa (Kd).
K s E s
U s C s d ( )
( ) ( )
Control Integral y Derivativo.
Por la naturaleza de estos controles, se
recomienda que sólo sean utilizados en conjunto
con un control proporcional.
Es decir, que podemos tener los siguientes tipos
de control, que serán los más eficientes en
ciertos casos.
Control P.
Control PI.
Control PID.
Control Proporcional-Integral (PI)
Este control genera una señal resultante de la
combinación de la acción proporcional e integral.
t
i
p
t
0 0
Donde Ti se denomina tiempo integral y
corresponde con el tiempo requerido para que la
acción integral iguale a la proporcional.
Control Proporcional-Integral (PI)
i p
i p p
Si Kp>>Ki.
El cero estará muy próximo al origen y la ganancia del
controlador vendrá de Kp.
Si Kp es muy grande, aumenta la ganancia en lazo
abierto del sistema, mejorando la exactitud sin
modificar importantemente la velocidad de respuesta
y la estabilidad del mismo.
Control Proporcional-Derivativo (PD)
Este control genera una señal resultante de la
combinación de la acción proporcional e
derivativo.
dt
de t K e t T dt
de t u t Kpe t Kd p d
( ) ( )
( ) ( ) ( )
Donde Td se denomina tiempo derivativo.