DIAGRAMA DE BLOQUES
1)
Felorero
2025
·
REPRESENTACIÓN
LTI
A
,
B
,
C
,
D
=
matrices
de
parámetros
constantes
dinámica
del 7
X
=
Ax
+
Bu
X
=
estados
vector
de
estados
y
=
(x
+
Bu
U
=
Características
de
la
entrada
,
en
términos
de
variables
de
co-energía
↓
Salida
sistema
*
A me
da
la
estabilidad
del
sistema
.
Valores
propios
de
A
deben
estar
en
el
semiplano
izquierdo
.
Una
forma
de
comprobarlo
es
(ISI-A)
#0
Y
debe
ser
una
matriz
cuadrada
.
*
La
matriz
de
controlabilidad
debe
ser
de
vango
completo
para
ser
controlable
.
↓
son
A
y
B
↳
Igual
a
la
dimensión
de
la
de
estados
.
C
=
[B
AB
AB
...
AnB]
-
>
de
aquí
se
puede
sacar
el
rango
-
c-
*
La
matriz
observavilidad
0
=
:
-
CH-
I
E
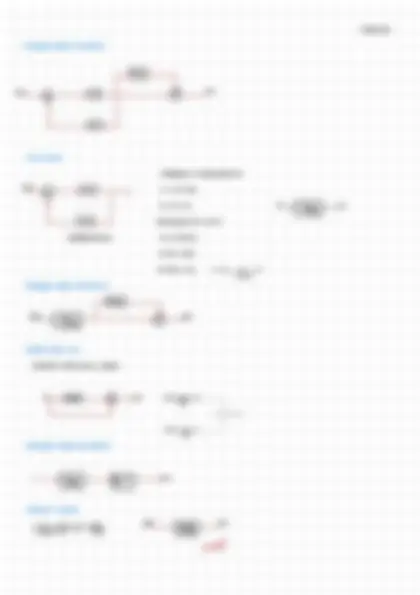
EMPLO1
.
Obtener
la
función
de
transferencia
en
lazo
cerrado
del
siguiente
diagrama
;
es
decir
:
RI)
<1)
>
Ha
R(s)
1
+
G0
Y
(S)
2
N
Hi
&
SOLUCIÓN
-
1
.
Quitar
una
señal
G
.
con
Hz
o
Gi
con
H
,
Ha/Gi
Potz
>
Ha
Pota
V
>
IIIIIIIII
*
S
>
G
·
P
.
G
,
*
PoGitPHey
#
PoGy
P(s)
a
>
Gi
·
DIAGRAMA
EQUIVALENTE
DIAGRAMA
ORIGINAL
I
.
Simplificar
para
obtener
la
salida
de
multiplicar
la
I
.
Salida
=
P
.
He
+
P
.
G
,
señal
P
.
G
,
por
el
bloque
#2/G
,
P
. c
[
=
P
.
Ha
#
Salida
del
equivalente
+
>
P
.
G
1
+
P
.
He