¡Descarga este requisito pendejo como caga y más Ejercicios en PDF de Mecánica solo en Docsity!
I
UNIVERSIDAD POLITÉCNICA SALESIANA
SEDE GUAYAQUIL
FACULTAD DE INGENIERÍAS
PORTADA
CARRERA DE INGENIERÍA ELECTRÓNICA MENCIÓN EN
SISTEMAS COMPUTACIONALES
TESIS PREVIA A LA OBTENCIÓN DEL TÍTULO DE:
INGENIERO ELECTRÓNICO CON MENCIÓN EN SISTEMAS
COMPUTACIONALES
TEMA:
“DISEÑO Y CONSTRUCCIÓN DE 2 ROBOTS SUMO PARA LAS
CATEGORÍAS PESADO Y LIVIANO Y UN ROBOT SEGUIDOR
DE LÍNEA MODALIDAD VELOCIDAD”
AUTORES:
JOSÉ SANTIAGO LINDAO GONZÁLEZ
ERICK HERMEL QUILAMBAQUI MAYORGA
TUTOR:
ING. GABRIEL GARCÍA VÁSQUEZ
GUAYAQUIL, FEBRERO 2014
II
DECLARATORIA DE RESPONSABILIDAD
Nosotros, José Santiago Lindao González y Erick Hermel Quilambaqui Mayorga declaramos bajo juramento que el trabajo aquí descrito es de nuestra autoría; que no ha sido previamente presentada para ningún grado o calificación profesional; y, que hemos consultado las referencias bibliográficas que se incluyen en este documento. A través de la presente declaración, cedemos nuestros derechos de propiedad intelectual correspondiente a este trabajo, a la Universidad Politécnica Salesiana, según lo establecido por la ley de propiedad intelectual por su reglamento y por su normatividad institucional vigente.
Guayaquil, 24 de Febrero del 2014
_________________________
José Santiago Lindao González C.I.: 091665211- 8
____________________________
Erick Hermel Quilambaqui Mayorga C.I.: 092017776- 3
IV
ÍNDICE GENERAL
PORTADA .................................................................................................................... I
DECLARATORIA DE RESPONSABILIDAD ......................................................... II
DEDICATORIA ....................................................................................................... III
ÍNDICE GENERAL ................................................................................................. IV
ÍNDICE DE TABLAS .............................................................................................. IX
ÍNDICE DE FIGURAS ............................................................................................ XI
ÍNDICE DE ANEXOS ....................................................................................... XVIII
RESUMEN.............................................................................................................. XIX
ABSTRACT ............................................................................................................. XX
INTRODUCCIÓN .................................................................................................. XXI
CAPÍTULO I................................................................................................................ 1
1. EL PROBLEMA ...................................................................................................... 1
1.1. Planteamiento del problema .................................................................................. 1 1.2. Delimitación del problema .................................................................................... 2 1.3. Objetivos ............................................................................................................... 2 1.3.1. Objetivo general ................................................................................................. 2 1.3.2. Objetivos específicos ......................................................................................... 2 1.4. Justificación........................................................................................................... 3 1.5. Hipótesis................................................................................................................ 3 1.6. Variables e indicadores ......................................................................................... 3
V
VIII
4.4.2. Identificación de partes principales de seguidor de línea modalidad velocidad ............................................................................................................................. 150 4.4.3. Producto terminado seguidor de línea modalidad velocidad ......................... 151 4.5. Cronograma de actividades ............................................................................... 152 4.6. Presupuesto ....................................................................................................... 153
CONCLUSIONES ................................................................................................... 154
RECOMENDACIONES .......................................................................................... 156
BIBLIOGRAFÍA ..................................................................................................... 157
ANEXOS ................................................................................................................. 159
X
Tabla 23: Elementos de la Etapa de Potencia .......................................................... 135 Tabla 24: Cronograma de Actividades ..................................................................... 152 Tabla 25: Presupuesto .............................................................................................. 153
XI
- 1.7. Metodología
- 1.7.1. Método teórico y sistémico
- 1.8. Población y muestra
- 1.8.1. Población
- 1.8.2. Muestra...............................................................................................................
- 1.9. Análisis de los datos
- 1.10. Descripción de la propuesta
- 1.10.1. Beneficiarios
- 1.10.2. Impacto
- CAPÍTULO II
- MARCO TEÓRICO
- 2.1. Antecedentes
- 2.2. Robótica
- 2.2.1. Hardware
- 2.2.2. Software
- 2.2.3. Investigación en robótica
- 2.2.4. Robótica educativa
- 2.3. Robot
- 2.3.1. Funcionamiento del robot
- 2.3.2. Los autómatas programables
- 2.3.3. Robot sumo
- 2.3.4. Robot seguidor de línea modalidad velocidad
- 2.4. Los microcontroladores y los microprocesadores
- 2.4.1. Características del microcontrolador................................................................
- 2.4.2. Microcontroladores PIC programables
- 2.4.3. Entornos de programación
- 2.5. Sistemas de control
- 2.5.1. Función de reset y del clock
- 2.5.2. Modulación por ancho de pulso (PWM)
- 2.5.3. El dohyo VI
- 2.5.4. Programación
- 2.5.5. El programa
- 2.5.6. Los sensores
- 2.5.7. Motores de corriente directa............................................................................
- CAPÍTULO III
- DISEÑO Y CONSTRUCCIÓN DE LOS ROBOTS SUMO
- 3.1. Robots sumo categoría liviano y categoría pesado
- 3.2. Breve descripción
- 3.3. Hardware
- 3.4. Fuente de alimentación
- 3.4.1 Descripción de nuestra fuente de alimentación
- 3.4.2. Tensión E1
- 3.4.3. Tensión E2
- 3.5. Etapa de control...................................................................................................
- 3.5.1. Descripción de la etapa de control
- 3.6. Sensores
- 3.6.1. Sensor sharp gp2y0a21yk
- 3.6.2. Sensor QRD1114
- 3.7. Conector de programación
- 3.8. Etapa de potencia
- 3.8.1. Descripción del circuito
- 3.8.2. Transistor 2N39004 NPN.................................................................................
- 3.8.3. Relay
- 3.8.4. Condensador
- 3.8.5. Motor DC
- 3.8.6. Resistencia y diodos
- 3.9. Software
- 3.9.1. Instalación de programas..................................................................................
- 3.9.2. Descripción del programa VII
- 3.9.3. Estructura del programa
- 3.9.4. Diagrama de flujo
- 3.9.5. Código de programación
- 3.9.6. Descripción de las partes más importantes de microcode studio
- 3.10. Diseño y estructura
- 3.10.1. Descripción de la construcción de los autómatas
- 3.10.2. Ensamblaje del robot sumo categoría liviano
- 3.10.3. Detalle del ensamblaje del robot sumo categoría liviano.............................
- 3.10.4. Identificación de partes principales del robot sumo categoría liviano
- 3.10.5. Dimensiones del robot sumo categoría liviano
- 3.10.6. Peso de robot sumo categoría liviano...........................................................
- 3.10.7. Ensamblaje del robot sumo categoría pesado
- 3.10.8. Identificación de partes principales del robot sumo categoría pesado
- 3.10.9. Dimensiones del robot sumo categoría pesado
- 3.10.10. Peso de robot sumo categoría pesado.........................................................
- CAPÍTULO IV
- DISEÑO Y CONSTRUCCIÓN DEL ROBOT SEGUIDOR DE LÍNEA
- 4.1. Robot seguidor de línea modalidad velocidad
- 4.2. Hardware
- 4.2.1. Fuente de alimentación
- 4.2.2. Etapa de control..............................................................................................
- 4.2.3. Etapa de potencia
- 4.3. Software
- 4.3.1. Estructura del programa
- 4.3.2. Código de programación
- 4.4. Diseño y estructura
- 4.4.1. Ensamblaje del robot seguidor de línea velocista
- Tabla 1: Cálculo de la muestra ÍNDICE DE TABLAS
- Tabla 2: Sexo................................................................................................................
- Tabla 3: Edad
- Tabla 4: Conoce sobre el CER
- Tabla 5: Participación de una división
- Tabla 6: Categoría
- Tabla 7: Procedencia de las tarjetas
- Tabla 8: Factores que inciden en la compra
- Tabla 9: Iniciativa para programación
- Tabla 10: Desarrollo de tarjetas
- Tabla 11: Elaboración propia de tarjeta
- Tabla 12: Diseño ideal
- Tabla 13: Beneficios
- Tabla 14: Elementos de la Fuente de Alimentación...................................................
- Tabla 15: Elementos de la etapa de control
- Tabla 16: Especificaciones técnicas del PIC 16F877A..............................................
- Tabla 17: Descripción de la conexión de los pines del PIC 16F877A
- Tabla 18: Especificaciones técnicas Sensor SHARP GP2Y0A21
- Tabla 19: Elementos de la Etapa de potencia.............................................................
- Tabla 20: Elementos de la Fuente de Alimentación.................................................
- Tabla 21: Elementos de la Etapa de Control
- Tabla 22: Descripción de la conexión de los pines del PIC 16F819
- Figura 1: Sexo ÍNDICE DE FIGURAS
- Figura 2: Edad
- Figura 3: Conoce sobre el CER....................................................................................
- Figura 4: Participación de una división
- Figura 5: Participación de una división
- Figura 6: Procedencia de las tarjetas
- Figura 7: Factores que inciden en la compra
- Figura 8: Iniciativa para programación
- Figura 9: Desarrollo de tarjetas
- Figura 10: Elaboración propia de tarjeta
- Figura 11: Diseño ideal
- Figura 12: Beneficios
- Figura 13: Robot Club de Robótica UPS-G casa abierta
- Figura 14: Robot Sumo Categoría Pesado (3 Kg Max)
- Figura 15: Robot Sumo Categoría Liviano (1.5 Kg Max)
- Figura 16: Dentro del Dohyo Robot Sumo Liviano y Pesado
- Figura 17: Robot seguidor de línea modalidad velocidad
- Figura 18: Diagrama de Bloques General de un PIC
- Figura 19: PIC16F877A
- Figura 20: Driver L293D XII
- Figura 21: Conexión Reset en un PIC
- Figura 22: Cristal Oscilador Generador de Clock en el PIC
- Figura 23: Componentes que Generan la señal de Clock en el PIC...........................
- Figura 24: Una señal de onda cuadrada de amplitud acotada
- Figura 25: Vista Isométrica de un Dohyo para Rotos Sumo......................................
- Figura 26: Vista superior de un Dohyo y dos sumos a competir
- Figura 27: Sensor Sharp
- Figura 28: Sensor QRD114
- Figura 29: Motor DC 12 V 120 RPM 50:1
- Figura 30: Diagrama de bloques de la tarjeta electrónica
- Figura 31: Tarjeta Electrónica Sumo Liviano Identificando sus Etapas
- Figura 32: Baterías Recargable de 9VDC y 12VDC
- Figura 33: Diagrama electrónico: Fuente de alimentación
- Figura 34: Batería de Li-Ion Recargable. 9VDC 350mA
- Figura 35: Regulador de voltaje
- Figura 36: Switch SW1 consta en la tarjeta electrónica
- Figura 37: Elementos usados en la Fuente de alimentación
- Figura 38: Batería Seca Sellada Recargable. 12VDC 1.3A
- Figura 39: Switch SW1 y Diodo led D4, montados en la placa
- Figura 40: Tarjeta Electrónica de Robot Sumo Liviano Versión 1.0
- Figura 41: Tarjeta Electrónica de Robot Sumo Pesado Versión 1.0 XIII
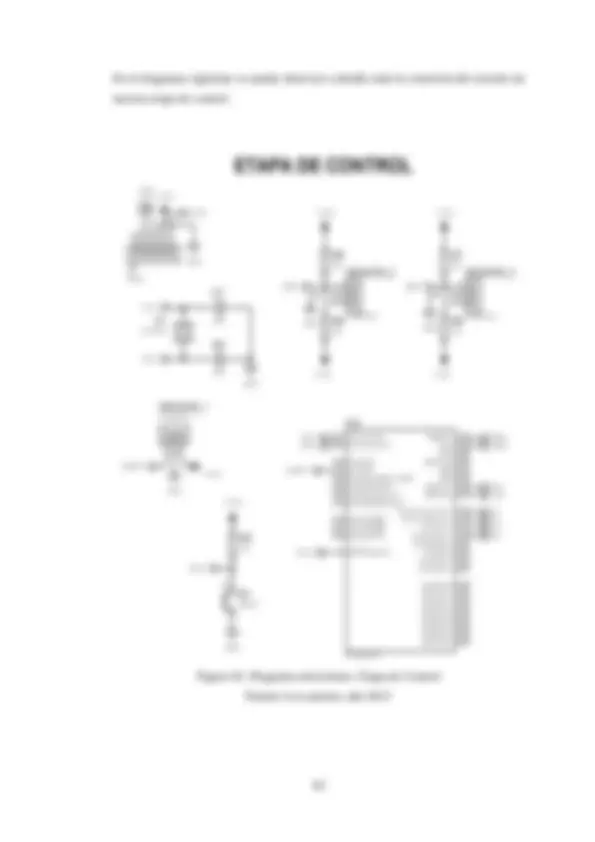
- Figura 42: Diagrama electrónico. Etapa de Control...................................................
- Figura 43: Descripción de los pines del PIC 16F877A
- Figura 44: Tarjeta Electrónica Sumo Liviano - Etapa de control
- Figura 45: Sensor SHARP GP2Y0A21YK
- Figura 46: Dimensiones de Sensor SHARP GP2Y0A21YK
- Figura 47: Diagrama interno en Bloque.
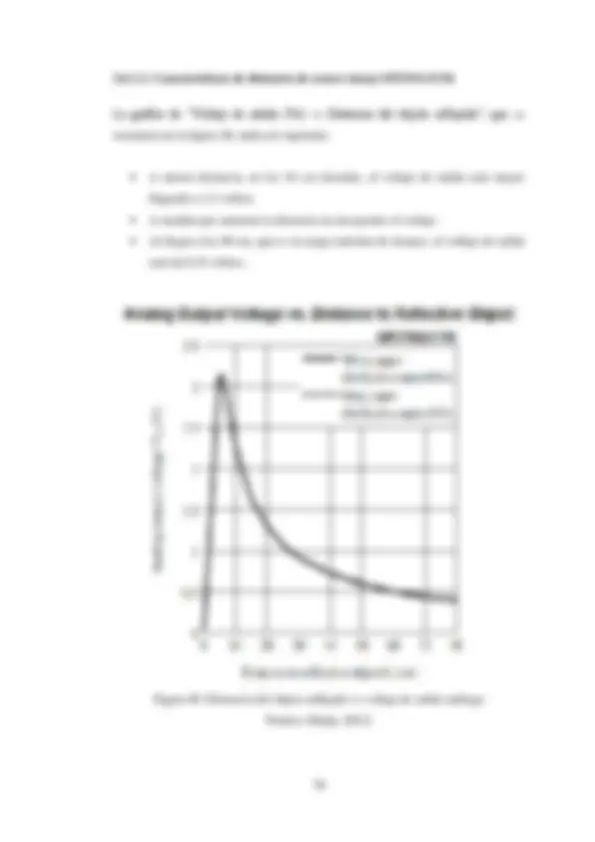
- Figura 48: Distancia del objeto reflejado vs voltaje de salida análogo
- Figura 49: Esquemático sensor QRD1114
- Figura 50: Dimensiones de QRD1114
- Figura 51: Esquemático para QRD1114 y CNY70
- Figura 52: Características de sensor reflectivo QRD1114
- Figura 53: Corriente de colector normalizada vs distancia
- Figura 54: Esquemático de Conector J1.....................................................................
- Figura 55: Transferencia de datos PC – Hardware - Robot
- Figura 56: Diagrama electrónico Etapa de Potencia Motor 1 Robot Sumo Liviano
- Figura 57: Diagrama electrónico Etapa de Potencia Motor 2 Robot Sumo Liviano
- Figura 58: Transistor 2N39004 NPN
- Figura 59: Transistor NPN 2N3904 y Diagrama esquemático
- Figura 60: Relé HKFF-DC5V-SHG y Esquema interno............................................
- Figura 61: Condensador 104pf
- Figura 62: Condensador Electrolítico XIV
- Figura 63: Motor 12VDC 10RPM 100:1
- Figura 64: Resistencias
- Figura 65: Diodos Rectificadores...............................................................................
- Figura 66: Vista Inferior de la tarjeta electrónica Robot sumo categoría Liviano
- Figura 67: Vista superior de la tarjeta electrónica Robot Sumo Categoría Liviano
- Figura 68: Etapa de Potencia Motor 1 y Motor 3. Robot Sumo Pesado
- Figura 69: Etapa de Potencia Motor 2 y Motor 4. Robot Sumo Pesado
- Figura 70: Tarjeta del Robot Sumo Pesado, detalle de los elementos
- Figura 71: Interface para comunicación PIC con Programa en PC
- Figura 72: Conexión y programación del autómata Sumo categoría Liviano
- Figura 73: Conexión y programación del autómata Sumo categoría Pesado
- Figura 74: Diagrama de flujo del programa
- Figura 75: Partes importantes del Lenguaje de Programación MicroCode Studio
- Figura 76: Estructura del Robot Sumo Categoría Liviano
- Figura 77: Instalación de Motores en Robot Sumo Categoría Liviano
- Figura 78: Parte Inferior de la estructura del Robot Sumo categoría Liviano
- Figura 79: Ubicación de sensor de línea derecho.....................................................
- Figura 80: Ubicación de Sensor de Proximidad.......................................................
- Figura 81: Ubicación de sensor de línea izquierdo
- Figura 82: Robot Sumo Liviano ensamble de sus partes principales
- Figura 83: Robot Sumo liviano diseño final XV
- Figura 84: Identificación de Partes principales dentro de su estructura...................
- Figura 73: Producto terminado – Robot Sumo Categoría Liviano
- Figura 86: Peso 1.5 kg de Robot Sumo Liviano
- Figura 87: Estructura de del Robot con Motores y Llantas
- Figura 88: Estructura y Chasis con Baterías, Motores, Llantas
- Figura 89: Estructura con Baterías de 12 Volteos de corriente directa (VDC)
- Figura 90: Base de Estructura de Robot Sumo Pesado Compactada
- Figura 91: Ensamblaje de Partes de Robot sumo Pesado
- Figura 92: Ensamblaje de Tarjeta Electrónica en Robot Sumo Pesado
- Figura 93: Estructura de Robot sumo Pesado con Tarjeta Electrónica
- Figura 94: Diseño Final del Robot Sumo Pesado
- Figura 95: Partes Principales del Robot Sumo Pesado
- Figura 96: Producto terminado - Robot Sumo Categoría Pesado
- Figura 97: Peso 3.0 kg Robot Sumo Pesado
- Figura 98: Robot seguidor de línea modalidad velocidad.
- Figura 99: Diagrama de bloques de la tarjeta electrónica
- Figura 100: Diagrama electrónico: Fuente de alimentación
- Figura 101: Diodo Rectificador 1N4001 – Simbología
- Figura 102: Descripción del regulador de Voltaje
- Figura 103: Diagrama electrónico: Etapa de Control
- Figura 104: PIC 16F819 XVI
- Figura 105: Tarjeta de sensores del robot seguidor de línea en su lado superior.....
- Figura 106: Tarjeta de sensores del robot seguidor de línea en su lado inferior......
- Figura 107: Conexión de entradas de sensores QRD1114 en el PIC16F819
- Figura 108: Esquemático de conexión de cristal oscilador
- Figura 109: Componentes que generan la Señal del CLOCK
- Figura 110: Distribución de los Puertos B en la tarjeta electrónica.
- Figura 111: Conector J1 para programar PIC 16F819
- Figura 112: Diagrama en Bloques PIC16F819
- Figura 113: Esquemático de control de Dirección de Motor
- Figura 114: Esquemático de Motor de Tracción
- Figura 115: Driver L293D
- Figura 116: Diagrama Lógico de L293D
- Figura 117: Conexión de Motores en un L293D
- Figura 118: Tabla de Funcionamiento L293D
- Figura 119: Identificación de pines del TIP
- Figura 120: Especificación Técnica de TIP
- Figura 121: Identificación de motor de tracción y dirección en caja reductora
- Figura 122: Conexión y programación del autómata Seguidor de línea Velocista
- Figura 123: Diagrama de flujo del programa
- Figura 124: Tarjeta de sensores QRD1114
- Figura 125: Caja Reductora con dos motores de tracción y dirección XVII
- Figura 126: Tarjeta Electrónica
- Figura 127: Base donde se acopla la tarjeta electrónica
- Figura 128: Partes del robot seguidor de línea
- Figura 129 Ensamblaje de todas las partes del robot seguidor de línea.
- Figura 130: Partes principales del Seguidor de línea modalidad velocidad
- Figura 131: Producto Final del seguidor de línea modalidad Velocidad
- Figura 132: Paso 1 Instalación de MicroCode Studio Plus
- Figura 133: Paso 2 Instalación de MicroCode Studio Plus
- Figura 134: Paso 3 Instalación de MicroCode Studio Plus
- Figura 135: Paso 4 Instalación de MicroCode Studio Plus
- Figura 136: Paso 5 Instalación de MicroCode Studio Plus
- Figura 137: Paso 6 Instalación de MicroCode Studio Plus
XIX
RESUMEN
AÑO ALUMNOS DIRECTOR DE TESIS TEMA TESIS
JOSÉ SANTIAGO
LINDAO GONZÁLEZ
ERICK HERMEL
QUILAMBAQUI
MAYORGA
ING.
GABRIEL
GARCIA
VASQUEZ
“DISEÑO Y CONSTRUCCIÓN
DE 2 ROBOTS SUMO PARA
LAS CATEGORÍAS PESADO
Y LIVIANO Y UN ROBOT
SEGUIDOR DE LÍNEA
MODALIDAD VELOCIDAD”
El proyecto de titulación tiene como objetivo el profundizar e investigar los autómatas programables aplicados al campo de la robótica movil, para esto se implementó tres robots autónomos programables los cuales tienen cargados cada uno un algoritmo de control para el funcionamiento óptimo. Entre los principales componentes de cada robot se tienen los microcontroladores 16F877A y un 16F en cuyos dispositivos están cargados los respectivos programas para controlar el movimiento de cada robot.
El presente proyecto tiene la finalidad de analizar e interpretar el funcionamiento de hardware y software para la elaboración, puesta en marcha de robots sumos y seguidor de línea que permitan obtener prototipos de autómatas con características de eficacia y fuerza para competir de manera satisfactoria en diferentes torneos, además de ayudar a los estudiantes a incrementar el interés en el diseño y creación de los robots, donde se combinan conocimientos de electrónica, programación a nivel medio y avanzado, complementando con diseños mecánicos, fomentando el interés en el diseño estructural.
Palabras claves: Robótica, Sistemas de control, Robot autómata, microcontroladores.
XX
ABSTRACT
YEAR STUDENTS DIRECTORTHESIS THESIS TOPIC
•JOSÉ SANTIAGO
LINDAO GONZÁLEZ
•ERICK HERMEL
QUILAMBAQUI
MAYORGA
ENG. GABRIEL
GARCIA
VASQUEZ
“DESIGN AND
CONSTRUCTION OF 2
SUMO ROBOTS FOR
HEAVY AND LIGHT
CATEGORIES AND A
FOLLOWER OF LINE
MODE SPEED ONLINE
ROBOT”.
The titling project aims to investigate deeper the programable logic controllers applied to the field of mobile robotics, for this, it was implemented three autonomous programmable robots which have each loaded a control algorithm for the optimal operation. The main components of each robot are 16F877A and 16F819 microcontrollers, devices which are loaded with the respective programs for controlling the movement of each robot.
This aimed project is to analyze and interpret the operation of hardware and software for the development of the high robots and line follower which would make an ideal design that combines efficiency and robustness to compete successfully. Will help students to enhance their interest in designing and building robots, which involved electronics, programming at both the hardware and supplementing with mechanical design and creativity software.
Keywords: Robotics, control systems, Robot controller, microcontroller