¡Descarga Estudio del Pendulo simple y más Monografías, Ensayos en PDF de Física solo en Docsity!
UNIVERSIDAD MAYOR DE SAN SIMÓN
FACULTAD DE CIENCIAS Y TECNOLOGÍA
DEPARTAMENTO DE FÍSICA
PENDULO SIMPLE
Autor: Diego Alejandro Urdininea Castellón
RESUMEN
Un péndulo simple se define como una partícula de masa m suspendida del punto O
por un hilo inextensible de longitud l y de masa despreciable. Un péndulo simple es un
ejemplo de oscilador no lineal. Se puede aproximar a un oscilador lineal cuando su
amplitud es pequeña.
Existen muy variados tipos de péndulos que, atendiendo a su configuración y usos,
reciben los nombres apropiados: péndulo simple, péndulo compuesto, péndulo cicloidal,
doble péndulo, péndulo de Foucault, péndulo balístico, péndulo de torsión, péndulo
esférico, entre otros.
Sus usos son muy variados: medida del tiempo (reloj de péndulo, metrónomo, ...),
medida de la intensidad de la gravedad, etc.
1. INTRODUCCIÓN
Objetivos
Encontrar la relación funcional entre el periodo de oscilación de un
péndulo simple
Determinar el valor de la aceleración de la gravedad
Marco teórico
El péndulo simple es un cuerpo idealizado que consiste de una masa puntual
suspendida por una cuerda ligera e inextensible.
Cuando se desplaza de su posición de equilibrio y se suelta, el péndulo oscila en
un plano vertical por la influencia de la fuerza de la gravedad.
Produciendo un movimiento oscilatorio
En la figura 1 se muestran las fuerzas que actúan sobre la masa en cualquier
instante del movimiento, estas fuerzas son:
La tensión T sobre el hilo
La fuerza de gravedad:
Aplicando la ecuación de movimiento
en la dirección tangencial, se tiene:
Donde el signo menos indica que la fuerza
apunta al punto de equilibrio.
La aceleración en la dirección tangencial es:
𝜕
2
𝑆
𝜕𝑡
𝑠
donde:
Representa la longitud de arco o trayectoria circular, L es la longitud del péndulo
que se mantiene constante.
Por tanto, la ecuación (1) se puede expresar:
𝜕
2
𝜃
𝜕𝑡
2
𝑔
𝐿
Para conseguir un Movimiento Armónico Simple, consideramos ángulos
menores o iguales a 10◦, con lo que:
Entonces se puede escribir:
𝜕
2
𝜃
𝜕𝑡
2
𝑔
𝐿
La Ec. (6) es una Ecuación Diferencial (ED) de segundo grado.
Las resoluciones de las ED proponen múltiples soluciones, una solución es:
𝜃(𝑡) = 𝜃 0 ∗ 𝑐𝑜𝑠(𝜔𝑡 + φ ) (7)
Donde:
θ0 está en radianes y es el máximo desplazamiento angular; es el desfase,
φ es la frecuencia angular, que para el caso del péndulo simple está dada por:
La frecuencia angular del péndulo simple es:
A partir de la ecuación (8) y considerando que:
el período de oscilación para el péndulo simple es:
Registrar las longitudes 𝐿 de la cuerda y los tiempos 𝑡1, 𝑡2, 𝑡3, 𝑡4, 𝑡5, donde
cada tiempo corresponde a 15 oscilaciones.
N L[m] t1 [s] t2 [s] t3 [s] t4 [s] t5 [s]
Luna
El diámetro de la esfera con su respectivo error es:
)[
]
Registrar las longitudes 𝐿 de la cuerda y los tiempos 𝑡1, 𝑡2, 𝑡3, 𝑡4, 𝑡5, donde
cada tiempo corresponde a 15 oscilaciones.
N L[m] t1 [s] t2 [s] t3 [s] t4 [s] t5 [s]
Júpiter
El diámetro de la esfera con su respectivo error es:
𝐷 = ( 0 , 13 ± 0 , 001 )[𝑚]; 0 ,77%
Tabla 1: Datos de la longitud de la cuerda y los tiempos para 15 oscilaciones
Tabla 2: Datos de la longitud de la cuerda y los tiempos para 15 oscilaciones
Registrar las longitudes 𝐿 de la cuerda y los tiempos 𝑡1, 𝑡2, 𝑡3, 𝑡4, 𝑡5, donde
cada tiempo corresponde a 15 oscilaciones.
N L[m] t1 [s] t2 [s] t3 [s] t4 [s] t5 [s]
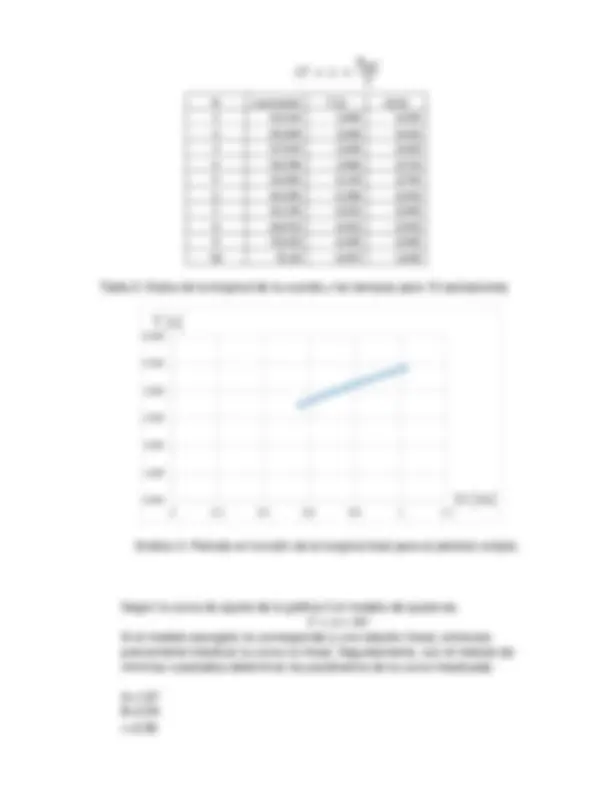
4. RESULTADOS
Tierra
A partir de la tabla 1 completar la tabla 4, donde 𝐿𝑇 es la longitud total del
péndulo, es decir la longitud 𝐿 de la cuerda más el radio de la esfera:
𝑒𝑠𝑓
N t promedio T [s] Lt[m]
1 21,364 1,424 0,
2 22,396 1,493 0,
3 23,406 1,560 0,
4 24,338 1,623 0,
5 25,27 1,685 0,
6 26,14 1,743 0,
7 27,038 1,803 0,
8 27,862 1,857 0,
9 28,634 1,909 0,
10 29,422 1,961 1,
Tabla 3: Datos de la longitud de la cuerda y los tiempos para 15 oscilaciones
Por tanto, la ecuación de ajuste escogida es:
𝑇
Con el modelo de ajuste escogido, encontrar el valor de la aceleración de la
gravedad local con su respectivo error:
2
𝑇
𝑇
2
𝑇
2
𝐿𝑡
2
𝑒𝑠𝑓
2
𝑑𝐿
𝑑𝐿 𝑇
𝐿
𝑒𝑠𝑓
𝑑𝐷 𝑒𝑠𝑓
𝑑𝐿 𝑇
𝐷
𝑒𝑠𝑓
𝑒𝑠𝑓
1
2
𝑒𝑠𝑓
𝐿𝑡
2
2
𝐿𝑡
𝑔
𝑇
2
𝑇
𝑇
𝐿
𝑇
𝑇
2
2
3
𝑇
𝑔
[
2
] ; 0 ,009%
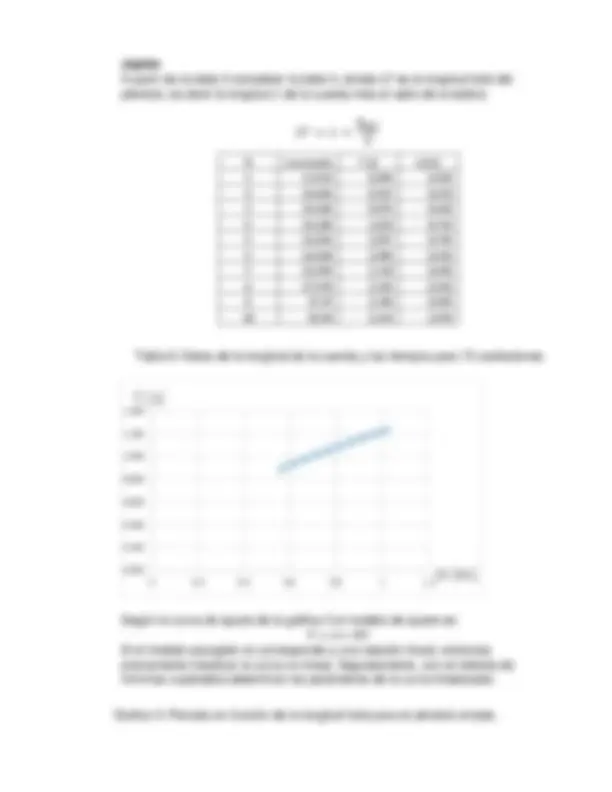
Luna
A partir de la tabla 2 completar la tabla 4, donde 𝐿𝑇 es la longitud total del
péndulo, es decir la longitud 𝐿 de la cuerda más el radio de la esfera:
𝑒𝑠𝑓
N t promedio T [s] Lt[m]
1 52,416 3,494 0,
2 54,964 3,664 0,
3 57,414 3,828 0,
4 59,784 3,986 0,
5 62,082 4,139 0,
6 64,254 4,284 0,
7 66,334 4,422 0,
8 68,412 4,561 0,
9 70,418 4,695 0,
10 72,25 4,817 1,
Según la curva de ajuste de la gráfica 2 el modelo de ajuste es:
Si el modelo escogido no corresponde a una relación lineal, entonces
previamente linealizar la curva no lineal. Seguidamente, con el método de
mínimos cuadrados determinar los parámetros de la curva linealizada:
A=1,
B=2,
r =0,
Tabla 5: Datos de la longitud de la cuerda y los tiempos para 15 oscilaciones
0,
1,
2,
3,
4,
5,
6,
0 0,2 0,4 0,6 0,8 1 1,
T [s]
Lt [m]
Grafico 2: Periodo en función de la longitud total para el péndulo simple,
Júpiter
A partir de la tabla 3 completar la tabla 5, donde 𝐿𝑇 es la longitud total del
péndulo, es decir la longitud 𝐿 de la cuerda más el radio de la esfera:
𝑒𝑠𝑓
N t promedio T [s] Lt[m]
1 13,416 0,894 0,
2 14,056 0,937 0,
3 14,686 0,979 0,
4 15,286 1,019 0,
5 15,856 1,057 0,
6 16,408 1,094 0,
7 16,954 1,130 0,
8 17,478 1,165 0,
9 17,97 1,198 0,
10 18,48 1,232 1,
Según la curva de ajuste de la gráfica 3 el modelo de ajuste es:
Si el modelo escogido no corresponde a una relación lineal, entonces
previamente linealizar la curva no lineal. Seguidamente, con el método de
mínimos cuadrados determinar los parámetros de la curva linealizada:
0,
0,
0,
0,
0,
1,
1,
1,
0 0,2 0,4 0,6 0,8 1 1,
T [s]
Lt [m]
Tabla 6: Datos de la longitud de la cuerda y los tiempos para 15 oscilaciones
Grafico 3: Periodo en función de la longitud total para el péndulo simple,
A=0,
B=0,
r =0,
2
2
2
2
2
2
− 4
2
2
𝐴
∑𝑑𝑖
2
𝑛− 2
∑𝑥𝑖
2
Δ
𝐵
∑𝑑𝑖
2
𝑛− 2
𝑛
Δ
𝐴
𝐵
Posteriormente encontrar los parámetros del modelo escogido con sus
respectivos errores
)[ ]
)[ ]
Por tanto, la ecuación de ajuste escogida es:
𝑇
Con el modelo de ajuste escogido, encontrar el valor de la aceleración de la
gravedad local con su respectivo error:
2
𝑇
𝑇
2
𝑇
2
𝑇
𝑇
𝐿 𝑇
𝑇
2
2
3
𝑇
𝑔
[
2
] ; 0 ,014%