Vista previa parcial del texto
¡Descarga Masa resorte ejercicio de materiales rigidos y más Ejercicios en PDF de Cálculo solo en Docsity!
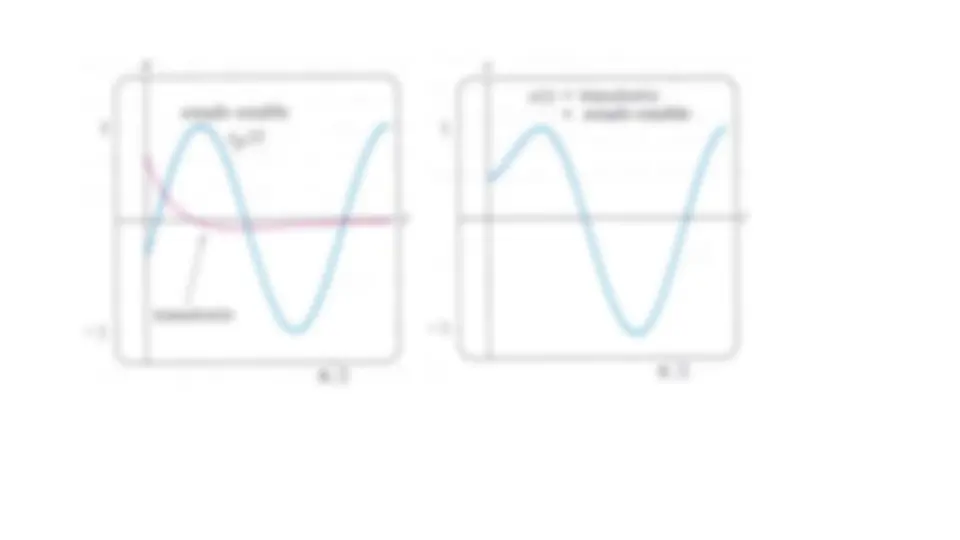
SISTEMAS RESORTE/MASA: MOVIMIENTO LIBRÉ NO AMORTIGUADO El no estirado posición de equilibrio mg—ks=0 movimiento LEY DE HOOKE SEGUNDA LEY DE NEWTON Px dos E —k(s + x) + mg = — kx + mg — ks = —kx == — cero 84 (1) ED DE UN MOVIMIENTO LIBRE NO AMORTIGUADO —Dividiendo (1) entre la masa m, se obtiene la ecuación diferencial de segundo orden 4%x/df + (k/m)x = 0, o A 0) dí” ECUACIÓN DE MOVIMIENTO - Para resolver la ecuación (2), se observa que la solución de su ecuación auxiliar m? + w? = 0 son los números complejos m, = w, m, = —0, Así de (8) de la sección 4.3 se encuentra la solución general de (2) es x(t) = c,cos wi + c, senwf. (3) T=27/w. f=1/T=w/21 ) el (o, XA SISTEMAS RESORTE/MASA: MOVIMIENTO LIBRE AMORTIGUADO ED DE UN MOVIMIENTO LIBRE AMORTIGUADO — En el estudio de la mecá- nica, las fuerzas de amortiguamiento que actúan sobre un cuerpo se consideran propor- cionales a una potencia de la velocidad instantánea. En particular, en el análisis pos- terior se supone que esta fuerza está dada por un múltiplo constante de dx/dt. Cuando ninguna otra fuerza actúa en el sistema, se tiene de la segunda ley de Newton que donde fB es una constante de amortiguamiento positiva y el signo negativo es una consecuencia del hecho de que la fuerza de amortiguamiento actúa en una dirección opuesta al movimiento. d?x dx di? q” EN CASO |: A? — w? > 0 En esta situación el sistema está sobreamortiguado porque el coeficiente de amortiguamiento B es grande comparado con la constante del resorte k. La solución correspondiente de (11) es x(t) = c,e” + c,e”z o x(t) = ec A + cje7 Pat) Esta ecuación representa un movimiento uniforme y no oscilatorio. En la figura 5.1.6 se muestran dos gráficas posibles de x(t). Xx m Y CASO Il: A? — ww? = 0 Este sistema está críticamente amortiguado porque cual- quier ligera disminución en la fuerza de amortiguamiento daría como resultado un movimiento oscilatorio. La solución general de (11) es x(t) = c,e”* + cate” O o =« Ye, + (14) En la figura 5.1.7 se presentan algunas gráficas típicas de movimiento. Observe que el movimiento es bastante similar al de un sistema sobreamortiguado. También es evi- dente de (14) que la masa puede pasar por la posición de equilibrio a lo más una vez. ¡A Y 5.1.3 SISTEMAS RESORTE/MASA: MOVIMIENTO FORZADO ED DE MOVIMIENTO FORZADO CON AMORTIGUAMIENTO Suponga que ahora se toma en consideración una fuerza externa (1) que actúa sobre una masa vibrante en un resorte. Por ejemplo, f(t) podría representar una fuerza motriz que causa un movimiento vertical oscilatorio del soporte del resorte. Véase la figura 5.1.11. La inclusión de f(t) en la formulación de la segunda ley de Newton da la ecuación diferen- cial de movimiento forzado o dirigido: de dx pe =B= + ' mz kx B di YO) (24) Dividiendo la ecuación (24) entre m, se obtiene d? d. E dy +7 + lx = Fl, (25) donde F(t) = f(t)/m y, como en la sección anterior, 24 = B/m, w? = k/m. Para re- solver la última ecuación homogénea, se puede usar ya sea el método de coeficientes indeterminados o variación de parámetros. CIRCUITO EN SERIE ANÁLOGO CIRCUITOS LRC EN SERIE Como se mencionó en la introducción de este capítulo, mu- chos sistemas físicos diferentes se describen mediante una ecuación diferencial de segundo orden similar a la ecuación diferencial de movimiento forzado con amortiguamiento: im Ex Maz + eE + kx =f(0). Si i(f) denota la corriente en el circuito eléctrico en serie LRC que se muestra en la 2500000 como se muestra en la figura 1.3.3. Por la segunda ley de Kirchhoff, la suma de estos SR figura 5.1.15, entonces las caídas de voltaje en el inductor, resistor y capacitor son (2) L 8 Ml voltajes es igual al voltaje E(t) aplicado al circuito; es decir, c di 1 Ea + Ri + ¿1 = Elt). Circuito LRC Pero la carga q(t) en el capacitor se relaciona con la corriente ¿(t) con i¡ = dg/dt, así la ecuación (33) se convierte en la ecuación diferencial lineal de segundo orden d?g dq 1 LA RT => de FR gp 1 0 TÉRMINOS TRANSITORIO Y DE ESTADO ESTABLE Cuando F es una función periódica, como F(t) = F, sen yt o F(t) = F, cos yt, la solución general de (25) para A > 0 es la suma de una función no periódica x (+) y una función periódica x 10) Además x.(t) se desvanece conforme se incrementa el tiempo, es decir, lím,_,.. x 1 = = 0. Así, para valores grandes de tiempo, los desplazamientos de la masa se aproximan mediante la solución particular x, (1). Se dice que la función complementaria x, (+) es un término transitorio o solución. transitoria y la función x,(t), la parte de la solución que per- manece después de un intervalo de tiempo, se llama término de estado estable o solu- ción de estado estable. Por tanto, observe que el efecto de las condiciones iniciales en un sistema resorte/masa impulsado por F es transitorio. En la solución particular (28), e” 38 cos 1 — EN un término de anda estable. Las gráficas de estos dos términos y la solución (28) se presentan en las figuras 5.12a y 5.12b, respectivamente. $ Sent) es un término transitorio y x,(1) = 5 cos 41 + 3 sen 41 es estado estable Xp (1) transitorio T/2 x(t) = transitorio + estado estable 7/2