


Solución numérica de
sistemas de ecuaciones no
lineales




Prepara tus exámenes y mejora tus resultados gracias a la gran cantidad de recursos disponibles en Docsity

Gana puntos ayudando a otros estudiantes o consíguelos activando un Plan Premium

Prepara tus exámenes
Prepara tus exámenes y mejora tus resultados gracias a la gran cantidad de recursos disponibles en Docsity
Prepara tus exámenes con los documentos que comparten otros estudiantes como tú en Docsity
Encuentra los documentos específicos para los exámenes de tu universidad
Estudia con lecciones y exámenes resueltos basados en los programas académicos de las mejores universidades
Responde a preguntas de exámenes reales y pon a prueba tu preparación
Consigue puntos base para descargar
Gana puntos ayudando a otros estudiantes o consíguelos activando un Plan Premium
Comunidad
Pide ayuda a la comunidad y resuelve tus dudas de estudio
Ebooks gratuitos
Descarga nuestras guías gratuitas sobre técnicas de estudio, métodos para controlar la ansiedad y consejos para la tesis preparadas por los tutores de Docsity
Soluciones numéricas para sistemas de ecuaciones no lineales mediante métodos iterativos y Newton. Se incluyen ejemplos con métodos de punto fijo, desplazamientos simultáneos y sucesivos, y método de Newton. Se explican conceptos básicos como notación, escalar y vectorial, resolución iterativa, criterios de convergencia y parada.
Tipo: Diapositivas
1 / 14

Esta página no es visible en la vista previa
¡No te pierdas las partes importantes!
n n
n^
n
i
n n^
i^
n
1
1
2 2
1
2 1
2
1
1
n^
n
n^
n
1
1
incr, iter
incr > tol
&
iter < maxiter
x
-^ incr = norm(x
−^ x
) 0
x^0
, iter
incr > tol
no converge
-^ Punto fijo •^ Estimación inicial •^ Iteraciones •^ Criterio de parada •^ Convergencia:
x^
G x k^
k
(^
)^
(^ ) (^
)
+^ 1 = x^
x^
x^ n
(^ )^
(^ )^
(^ )
(^
,...,
)
0
(^0 )
0
= x^
x^
tol
k^
k
(^
)^
(^ ) +^
−^
<
1 F x
x^
G x
(^ )^
(^
)
=^
⇔
=
0
.n ,... (^2) , 1 j; 1 K; K n x
)x (gj i
= < < ∂ ∂
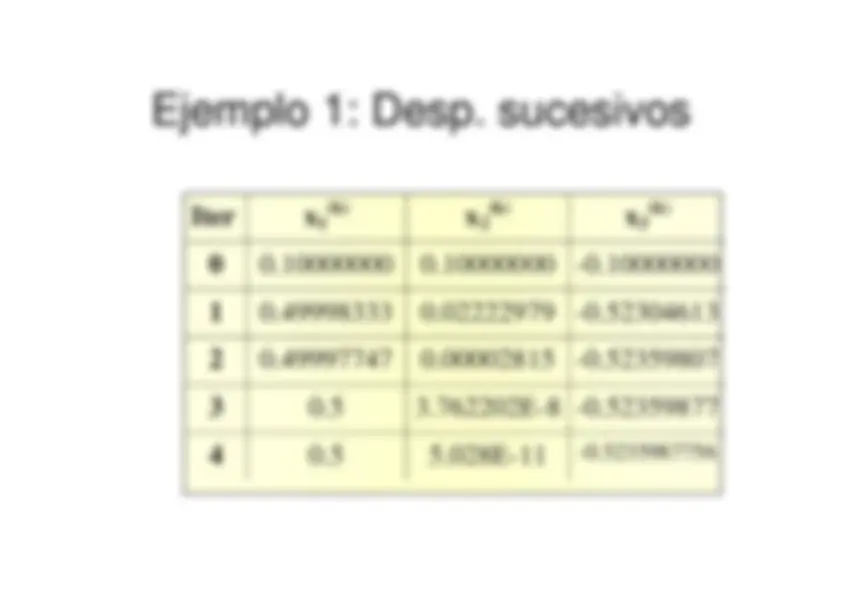
-^ Punto Fijo con desplazamientos simultáneos•^ Punto Fijo con desplazamientos sucesivos
x^
x^
x
x^
x^
x
x^
x^
x
k^
k^
k
k^
k^
k
k^
k^
k
(^11)
2
3
16
(^12)
19
1
2
3
(^13)
120
1
2 3
1 06
0 1
1
6
(^ )^
(^ )^
(^ )
(^ )^
(^ )^
(^ )
(^ )^
(^ )^
(^ )
cos(
) / sen
.^
.
exp
/
=^
=^
+^
+^
−
=^
−^
−^
−
⎫ ⎪⎪ ⎬ ⎪ ⎪⎭ π
x^
x^
x
x^
x^
x
x^
x^
x
k^
k^
k
k^
k^
k
k^
k^
k
(^11)
2
3
16
(^1 )
19
(^1 ) 2
3
(^1 )
120
(^11)
(^12) 3
1 06
0 1
1
6
(^ )
(^ )^
(^ )
(^ )
(^ )
(^ )
(^ )
(^ )
(^
)
cos(
) / sen
.^
.
exp
/
+^
+^
+^
=^
=^
+^
+^
−
=^
−^
−^
−
⎫ ⎪⎪ ⎬ ⎪ ⎪⎭ π
Iter
(k)x 1
(k)x 2
(k)x 3
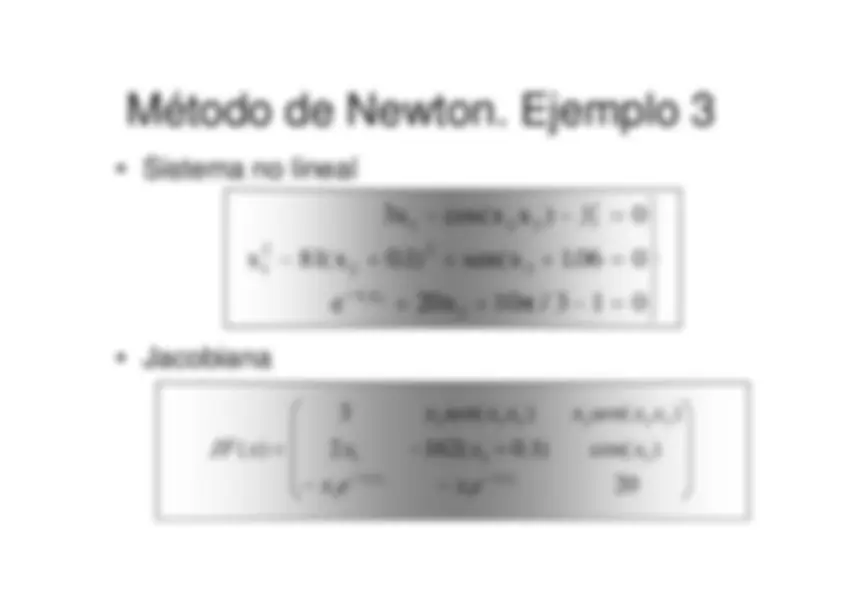
-^ Sistema de ecuaciones•^ Aproximación por el plano tangente•^ Paso de Newton•^ Se estila:
F x
x^
x^
x^
f^
x^
f^
x
n^
n
n^
n
1
1
) () ( ) ( )(
) (^0) (
) (^0) (
) (^0) (
x x x JF xF xF
− ⋅
≅
) ( ) (^
) (^0) ( 1 ) (^0) (
) (^0) ( ) (^1) (
xF
x JF x x^
⋅
− =^
−
) x( F y) x( JF con
y x x
) (^0) (
) (^0) ( ) (^0) (
) (^0) ( ) (^0) ( ) (^1) (
=
x^
y x^
y^
Sol x
y
2
2 2
2
12
12
34
x^
y
0
0 1
3
=^
= ,
x y
x y
x^
y x^
y
x^
y x^
y
1 1
0 0
0
0 0
0
1
(^20)
(^20) (^20)
(^2 )
12
−
⎞ ⎟ ⎟ ⎟ ⎠
⎛ ⎜ ⎜ ⎜ ⎝
−
−
−
=
−
−^
20
) cos( ) (^1). 0 ( 162
2
) (
) (
3 )(
(^21)
(^21)
1
2
3
2
1
(^32) 2 (^32) 3
xx
xx
ex
ex
x
x
x
xx senx
xx senx
x JF
1
2 3
12
(^21)
2
2
3 3
1 2
x x
−
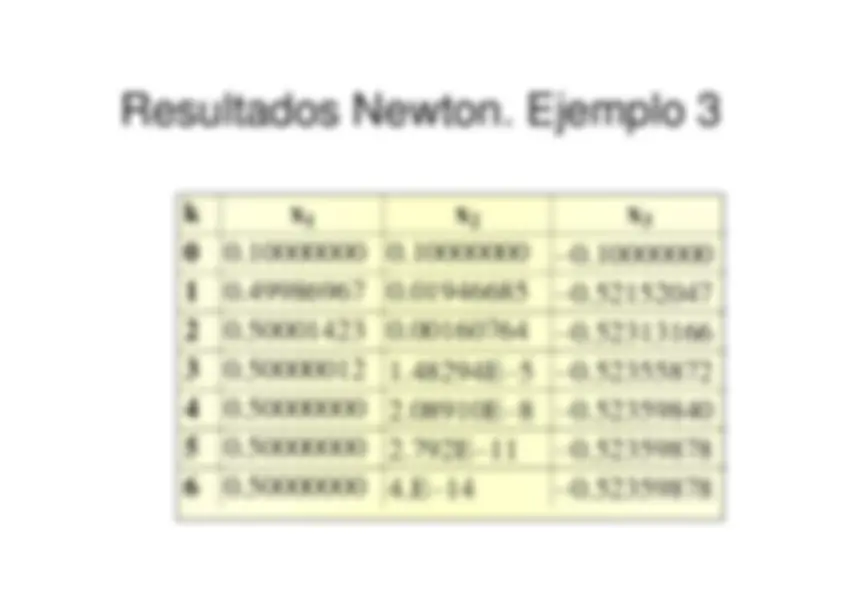
k^
x^1
x^2
x^3
0
−
1
−
2
−
3
1.48294E
−^5
−
4
2.08910E
−^8
−
5
2.792E
−^11
−0.
6
4.E
−^14
−0.