¡Descarga Microcontroladores MC68HC11 y más Apuntes en PDF de Microcontroladores solo en Docsity!
MICROCONTROLADOR 68HC11: Fundamentos, recursos y programación. MICROBÓTICA.
MICROCONTROLADOR
MC 68 HC 11
FUNDAMENTOS, RECURSOS Y PROGRAMACIÓN
CRISTINA DOBLADO ALCÁZAR
JUAN GONZÁLEZ GÓMEZ
ANDRÉS PRIETO−MORENO
JUAN JOSÉ SAN MARTÍN
I
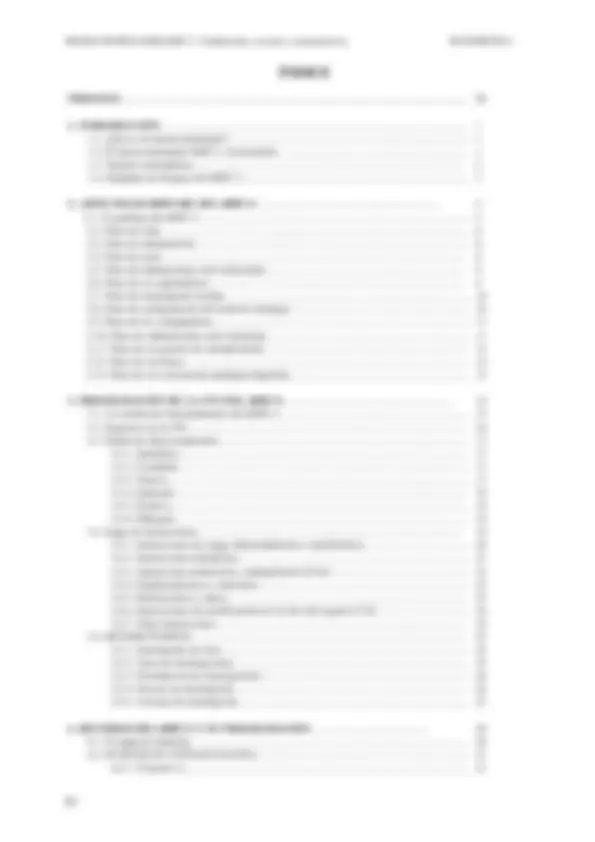
CPU
BUS EXPANSION
DIRECCIONES DIRECCIONES/DATOS
E/S PARALELA
PUERTO B
CONTROL PUERTO C
LOGICA DEL RELOJ
OSCILADOR (^) LOGICA DE
INTERRUPCIONES
XTAL EXTAL E IRQ XIRQ RESET
ROM 8K
PUERTO D
CONTROL
SPI SCI
PUERTO E
CONVERSOR A/D
VRH VRL
RAM 256 BYTES
EEPROM 512 BYTES
PUERTO A
CONTROL DE LOS MODOS
TEMPORIZADOR
MODA MODB
Interrupcionesperiódicas
COP
Acumulador depulsos
PA7 PA0PB7 PB0PC7 PC
PAIOC2OC3OC4OC5IC1IC2IC
PD5 PD0 PE7 PE
SSSCKMOSIMISOTxDRxD
R/WAS
STRBSTRA
STRB/ R/WSTRA/AS
MICROCONTROLADOR 68HC11: Fundamentos, recursos y programación. MICROBÓTICA
II
MICROCONTROLADOR 68HC11: Fundamentos, recursos y programación. MICROBÓTICA
ÍNDICE
MICROCONTROLADOR 68HC11: Fundamentos, recursos y programación. MICROBÓTICA.
PROLOGO
A lo largo del siglo XX, la construcción de sistemas electrónicos ha exhibido un ritmo de
crecimiento único; sus logros resultan impensables en cualquier otra rama de la tecnología. Una de
las claves de este desarrollo ha sido la estandarización, miniaturización y abstracción de sus
componentes, un proceso comenzó con la radiodifusión comercial, continua con la aparición de la
televisión y recibe el impulso definitivo durante la Segunda Guerra Mundial. El tiempo
transcurrido entre los relés, válvulas, transistores, circuitos impresos, circuitos integrados de
densidades y tecnologías diversas, hasta llegar a los chips VLSI actuales es tan breve, que aún hoy
es posible encontrar venerables ingenieros−dinosaurios que, a lo largo de su carrera profesional,
han creado productos electrónicos sorprendentes con cada uno de estos dispositivos.
Uno de los componentes estándares más famosos han sido los pertenecientes a la "familia" TTL. La
mayoría de los estudiante de Ingeniería y Ciencias Físicas los conocen: han sido obligados a
perpetrar al menos un circuito digital con ellos. Estos dispositivos han ofrecido durante años una
variedad de útiles funciones estandarizadas, magníficamente implementadas e ingeniosamente
divididas en "rebanadas" de 4, 8 o más bits. Sin embargo, ya en la década de los ´70 el estilo de
diseño TTL había entrado en crisis. En efecto, si bien la agrupación de estos componentes permitía
al diseñador materializar cualquier producto imaginable, sus características finales en tamaño,
consumo, fiabilidad y precio limitaban notablemente la posibilidad de ganar dinero mediante su
comercialización. Adicionalmente, dado que cada producto debía diseñarse de manera artesanal,
incluso la cantidad de ingenieros disponibles por aquella época para realizar estas tareas comenzó a
ser insuficiente, constituyendo otro freno a las posibilidades de negocio.
Algunas personas comenzaron a preguntarse como salir de esta crisis. Por un lado, los avances en
el proceso de integración permitían aumentar la complejidad de los circuitos integrados. Pero
agregar complejidad a los dispositivos implicaba también aceptar que el campo de aplicación sería
más restringido. Otra vez aparecían los aspectos económicos. La pregunta que flotaba en el aire
era: ¿Cómo hacer un dispositivo lo suficientemente "grande" como para permitir la construcción
de sistemas electrónicos lo suficientemente complejos, pero que a la vez que resultara lo
suficientemente estándar para que su precio fuese lo suficientemente bajo? La respuesta a esta
encrucijada la encontró Ted Hoff y la materializó Federico Fagin. Aparecía un componente
paradigmático: el microprocesador.
Hoff y Fagin trabajaban en 1971 en una pequeña empresa dedicada al prometedor campo de la
electrónica integrada, dos palabras cuyos apócopes daban nombre a la compañía: INTEL. Habían
recibido el encargo de realizar un conjunto de chips para una calculadora electrónica. Pronto se
dieron cuenta que con el man−power disponible (solo 4 ingenieros de diseño) no podrían terminar
el trabajo a tiempo. Solo había una posibilidad de éxito: diseñar un único circuito, que fuera
programable a la manera de los grandes computadores de la época. Así, el mismo chip podría ser
usado en las diferentes tareas de la calculadora: leer el teclado, realizar las operaciones, exhibir los
resultados, etc. con solo modificar su programa. El resto de la historia es conocido.
El microprocesador surge como el primer circuito integrado altamente complejo, totalmente
estándar y relativamente fácil de utilizar. La combinación complejidad−programabilidad se ha
extendido a dos famosos derivados del microprocesador: el Procesador Digital de Señal y el
Microcontrolador. La fórmula también ha sido aplicada exitosamente en el otro componente−
paradigma totalmente diferente: la FPGA. Este libro se centra uno de ellos, el microcontrolador.
El microcontrolador es uno de los componente actuales más "entretenidos", económicos y de
mayor campo de aplicación. Por un precio cercano a 1K pesetas, se puede conseguir un chip que
VII
MICROCONTROLADOR 68HC11: Fundamentos, recursos y programación. MICROBÓTICA
integra una CPU, varios temporizadores, puertos de E/S, bloques de comunicación e incluso
conversores analógico−digital. Solo le falta incluir una FPGA, al menos por ahora.... En lo que
respecta al software de programación, es sencillo, potente, gratis, e ilimitado en la www. Más no se
puede pedir.
El enfoque para la enseñanza de microcontroladores adoptado en este libro por el Grupo J&J es
útil, eminentemente práctico y ligado al objetivo esencial del dispositivo: la construcción de
productos electrónicos fiables en el mínimo tiempo posible. Para ello el texto incluye 43 ejemplos
muy claros, pequeños programas que en conjunto cubren la mayoría de las aplicaciones de los
microcontroladores y finalmente, 8 planos de circuitos. La cosa no queda allí, los J&J (que en
realidad son, alfabéticamente, A&C&J&J) también han desarrollado una tarjeta de desarrollo, la
CT6811 basada en el 68HC11 de Motorola, una interface de potencia y varias rutinas para su
programación. No resulta extraño que estos productos hayan alcanzado cierta popularidad entre los
aficionados a la mecatrónica−robótica y que el Grupo J&J se haya transformado en uno de los
impulsores de esta disciplina en el área de Madrid.
Confío que este libro permitirá a los lectores aprender todos los trucos del tema en unas pocas
horas.
Prof. Eduardo Boemo
Escuela Superior de Ingeniería Informática, Universidad Autónoma de Madrid, 1998
VIII
MICROCONTROLADOR 68HC11: Fundamentos, recursos y programación. MICROBÓTICA
DISPOSITIVO RAM ROM EPROM EEPROM COMENTARIOS
MC68HC11A0 256 0 0 0
MC68HC11A1 256 0 0 512
MC68HC11A7 256 8K 0 0
MC68HC11A
256 8K 0 512
Temporizador de 16 bits 8 canales A/D SPI
SCI
MC68HC11D0 192 0 0 0
MC68HC11D3 192 4K 0 0
MC68HC
D
192 0 4K 0
Temporizador de 16 bits SPI
SCI
MC68HC11EDO 512 0 0 0 Temporizador, SPI,SCI
MC68HC11E0 512 0 0 0
MC68HC11E1 512 0 0 512
MC68HC11E8 512 12K 0 0
MC68HC11E9 512 12K 0 512
MC68HC
E
512 0 12K 512
Temporizador de 16 bits 8 canales A/D SPI
SCI
MC68HC811E2 256 0 0 2K Temporizador,SPI,SCI, 8 canales A/D
MC68HC11E20 768 20K 0 512
MC68HC
E
768 0 20K 512
Temporizador de 16 bits,
8 canales A/D, SPI,SCI
MC68HC11F1 1K 0 0 512 Bus no multiplexado, 8 canales A/D,SCI,SPI,44 CS
Figura 1: La familia 68hc11 de Motorola
1.3. Tarjetas entrenadoras
Para desarrollar aplicaciones con el microcontrolador 68HC11 se necesita una tarjeta entrenadora. Estas tarjetas permiten cargar programas en la RAM interna del microcontrolador desde el PC. Una vez que el programa funciona correctamente se graba en la EEPROM interna o en una EPROM externa. Aquí se hace referencia a la tarjeta CT6811 del Grupo J&J. Esta entrenadora contiene lo mínimo que se necesita para poder trabajar con el 68HC11. Lo interesante es que puede servir para el desarrollo de aplicaciones (modo entrenador), y para usarla como producto terminado (modo autónomo). La CT6811 funciona con una fuente de alimentación de 5 voltios, siendo también posible utilizar pequeños transformadores a 6 voltios, o incluso 4 pilas tamaño AA. La conexión al PC se realiza por el puerto serie y la tarjeta dispone de una serie de ’jumpers’ para configurar difrentes modos de trabajo.
X
MICROCONTROLADOR 68HC11: Fundamentos, recursos y programación. MICROBÓTICA.
1.4. Diagrama de bloques del 68HC
XI
MICROCONTROLADOR 68HC11: Fundamentos, recursos y programación. MICROBÓTICA.
Debido al diseño de los circuitos internos del micro, muchas de las señales de salida son de colector abierto. El fabricante recomienda como resistencia de pull−up un valor de 4K7.
Cuando se monta un sistema digital basado en microcontrolador, existe siempre el peligro de que un mal diseño provoque no solo un mal funcionamiento sino un daño irreparable de los circuitos. Esto se debe a que a diferencia de la lógica digital habitual, los microcontroladores, en general, trabajan con varios tipos de señales, conversores A/D, salidas PWM, líneas de transmisión y un largo etcétera, lo que provoca que un mal conexionado pueda tener graves consecuencias.
Un mecanismo de protección frente a este tipo de conflictos es el adoptado por el 68HC11 donde varios de sus pines se encuentran dotados de circuitos internos de protección. Igualmente este tipo de soluciones tienen sus propias limitaciones por lo que nunca se debe bajar la guardia. Para saber más sobre estas protecciones acudir al manual de Referencia Técnica de Motorola.
Para facilitar la comprensión se clasifican todos los pines del microcontrolador en grupos de acuerdo a las funciones de los mismos, siendo estas agrupaciones las siguientes.
- Alimentación: VDD, VSS.
- Reloj: EXTAL, XTAL, E.
- Reset: RESET.
- Transmisión serie asíncrona: TxD, RxD.
- Petición de interrupciones hardware: IRQ, XIRQ, IC1−3, PAI, STRA.
- Modos de arranque: MODA, MODB.
- Comparadores: OC1−5.
- Capturadores: IC1−3, PAI.
- Transmisión serie síncrona: SCK, MISO, MOSI, SS.
- Puertos: PA0−7, PB0−7, PC0−7, PD0−3, PE0−3.
- Conversores: AN0−7.
- Buses: AD0−7, A8−15, AS, R/W.
Con esta clasificación, se intenta dar una vista general de todos los subsistemas hardware que conforman el microcontrolador y que tienen salida directa al exterior a través del encapsulado. Las descripciones son resumidas ya que en capítulos posteriores se detallan cada uno de los sistemas individualmente.
2.2. Pines de reloj
- EXTAL y XTAL : Son las conexiones de entrada para la introducción de una señal de reloj. El microcontrolador está diseñado para trabajar con osciladores de cristal de la forma que muestra la figura 2. Esta frecuencia de reloj que es introducida en el MCU, es la encargada de regir el funcionamiento interno de los susbsisitemas que lo componen, por lo que no hay que confundirla con la señal de reloj de sus buses de datos ya sea internos o externos. La velocidad máxima aconsejable por el fabricante está en torno a los 8Mhz. Es muy recomendable trabajar a esta frecuencia ya que de esta manera se consigue que el chip disponga de valores de velocidades para las transmisiones asíncronas compatibles con el estándar RS232c como los típicos 9600 baudios. Para frecuencias altas, mayores de 1 MHz el circuito es el mostrado en la figura 3. Para trabajar a frecuencias más bajas es necesaria la inclusión de una resistencia más para lograr que la impedancia de salida aumente y no afecte mucho al MCU. Los valores que da el fabricante para los componentes del circuito de reloj son: R=1−10MΩ y C1=C2=5−
25pF. En el circuito de reloj de la tarjeta CT6811 los valores empleados son C1=C2=22pF y R=10MΩ. El valor del cristal es de 8 MHZ.
XIII
MICROCONTROLADOR 68HC11: Fundamentos, recursos y programación. MICROBÓTICA
- E : Por este pin el MCU genera una señal de reloj, cuatro veces menor, que la que es introducida por medio del oscilador externo (EXTAL y XTAL). Esta señal, la utiliza el micro para gestionar todos los dispositivos periféricos del sistema., es decir, la señal E es la velocidad del bus. A modo de ejemplo, cabe notar que la tarjeta CT6811 dispone de una velocidad de bus de 2MHz. Debido a la importancia de esta señal, y al uso que se hace de la misma se la volverá a citar más adelante.
XIV
EXTAL
XTAL
C
C
R
Figura 2: Circuito de reloj para frec. mayores de 1MHZ
MICROCONTROLADOR 68HC11: Fundamentos, recursos y programación. MICROBÓTICA
2.3. Pines de alimentación
- VDD : Es el pin de alimentación positiva, la cual debe ser el valor estándar de cinco voltios (el margen aceptado es de 4.5 a 5.5 voltios)
- VSS : Es la masa del MCU.
Para asegurar una buena robustez contra el ruido, es conveniente la conexión de un par de condensadores en paralelo entre VDD y VSS, con el fin de que estos anulen los posibles rizados provenientes de la fuente de alimentación y provocados por las conmutaciones internas del microcontrolador. Dichos condensadores deben estar físicamente lo más cerca posible al chip. Los valores cedidos por el fabricante para dichos componentes son de 1 y 0.01 microfaradios.
2.4. Pines de reset
- RESET : Está señal, activa a nivel bajo, es bidireccional. El 68HC11 está preparado no sólo para recibir señales de "reset" por este pin sino que es el propio dispositivo el que es capaz de generar dicha señal para todos los periféricos que conformen el sistema digital. De esta manera es posible que el diseñador trate a los subsistemas internos del microcontrolador como un conversor A/D, del mismo modo que a cualquier dispositivo externo como un display, ya que al recibir la señal de "reset, el MCU la transmitirá internamente al A/D, y generará la misma señal para el display. Generar un "reset" admite una gran cantidad de diseños diferentes. Dependiendo del tipo de sistema digital conviene uno u otro. Uno de los más utilizados en las tarjetas entrenadoras, es la conexión de un simple pulsador que al presionarlo habilite un camino de masa al pin E. A partir de aquí, las evoluciones son muy variadas. En la figura 4 se muestra un ejemplo de un circuito de reset. Este circuito es el empleado en la tarjeta CT6811. Observar que se ha conectado el componente MC34064, de Motorola, en la entrada de reset del 68HC11. Este componente se emplea para que sólo lleguen tensiones de 0 ó 5 voltios a la entrada de "reset". Si no se emplea este componente, al conectar y desconectar la alimentación pueden aparecer tensiones transitorias entre 0 y 5 voltios que hagan que el micro ejecute instrucciones aleatorias, lo que provoca cosas inesperadas. Cabe notar, que en este mismo circuito se dispone de una entrada de "reset software", esto brinda la posibilidad del control de la tarjeta, es este caso la CT6811, dese otro dispositivo que tenga acceso a ese pin como puede ser un PC. Por último destacar que este pin es de colector abierto y para deshabilitarlo (que no sea un "reset" constante) debe tener una resistencia de pull−up de 4K7.
XVI
VCC
Reset Software
Reset del 68HC
MC
RST
VCC
4K
Pulsador de reset
Figura 4: Circuito de reset empleado en la tarjeta CT
MICROCONTROLADOR 68HC11: Fundamentos, recursos y programación. MICROBÓTICA.
2.5. Pines de transmisión serie asíncrona
- TxD y RxD : Son los pines de transmisión y recepción de datos serie asíncronos. El 68HC11 trabaja con niveles TTL, por lo que será necesario un circuito de adaptación si se quiere comunicar con un dispositivo que utilice otro tipo de norma como por ejemplo un PC (norma RS−232C). Un integrado que realiza esta adaptación es el MAX232. En la figura 5 se muestra el diagrama de bloques de la conexión del 68HC11 a un PC. En la figura 6 se muestra cómo se debe configurar el MAX232 para que realice correctamente la función de adaptación. Los condensadores empleados son
electrolíticos de 22μF y 25V.
Una de las ventajas de este dispositivo o similar es que no hacen uso de alimentaciones externas, diferentes a las habituales en estos sistemas (5V), evitando de esta manera aumentar la complejidad de los sistemas de alimentación.
2.6. Pines de los
capturadores
- IC1, IC2 e IC3 : Estos tres pines representan las tres entradas de los tres capturadores independientes que incorpora el 68HC11. Mediante ellos, es posible recoger cualquier cambio de nivel que se produzca en la circuitería exterior. (Los capturadores son tratados en la sección 4.8).
- PAI : Este pin representa la entrada a un acumulador de pulsos, mediante el cual es posible medir la duración y contar flancos activos de señales externas al microcontrolador.
XVII
RS−232 TTL
PC (^) 68HC
Amplificación
Atenuación
Figura 1: Funcionamiento del integrado MAX
Figura 2: Configuración del MAX232 para conectar el 68HC11 a un PC (norma RS−232C)
MICROCONTROLADOR 68HC11: Fundamentos, recursos y programación. MICROBÓTICA.
2.9. Pines de los comparadores
− OC2, OC3, OC4 y OC5 : Estos cuatro pines representan las respectivas salidas hardware de cuatro de los cinco comparadores internos de los que está provisto el microcontrolador. Una vez comparado un valor previamente almacenado en un registro de 16 bits con el valor del temporizador principal, en el caso de producirse la igualdad y cuando las salidas hardware estén habilitadas, el pin correspondiente al comparador activado muestra a la salida el nivel para el cual esté configurado. Los comparadores se tratan en profundidad en la sección 4.7.
− OC1 : Si bien posee un solo nombre, aquí se ven representados nada menos que cinco pines de salida. Del mismo modo que en el caso anterior se trata de un comparador, pero que su salida hardware no es de un solo canal, sino de cinco!. (Más información en sección 4.7.4)
2.10. Pines de transmisiones serie síncrona
- SCK : Este pin se refiere a la señal de reloj que comanda cualquier transmisión síncrona. Puede ser tanto de salida como de entrada, según que el microcontrolador trabaje como maestro o esclavo respectivamente.
- MISO y MOSI : (Master In Slave Out) (Master Out Slave In), estos dos pines son las dos vías por donde van a fluir los datos. Para el caso en que se configure el 68HC11 para trabajar como Maestro frente a otro dispositivo, el cual hace de esclavo, el pin MOSI es el que funciona como salida de datos desde el maestro al esclavo y el pin MISO es la vía contraria, es decir por donde el maestro recibe los datos del esclavo.. En la figura 8 se muestra el estado de los pines del SPI cuando el 68HC11 funciona como maestro y como esclavo.
Mientras que si el MCU se usa como Esclavo, los datos del Maestro se reciben por el MOSI y tienen su vía contraria por MISO. Ver figura.
Para el caso en que a lo largo de las transmisiones el 68HC11 varíe su papel de maestro o esclavo, los pines cambiarán su función de forma automática.
−SS : Señal que se activa a nivel bajo y que tiene diferentes funciones según se haya configurado el micro como Maestro o Esclavo.
68HC11 como esclavo : Cuando SS=0 se activa el sistema de transferencias síncronas, en caso contrario la señal SCK no es tenida en cuenta y MISO está en estado de alta impedancia. 68HC11 como maestro : SS no repercute dentro de la transmisión propiamente dicha y puede ser utilizada como detección de errores, o de propósito general. Normalmente se utiliza para activar al esclavo, aunque cualquier bit de cualquier otro puerto sirve para esta función.
XIX
68HC MAESTRO
MOSI
MISO
ESCLAVO
SCK
SS
68HC ESCLAVO
SCK MOSI MISO SS
MAESTRO
DISPOSITI VO
DISPOSITIVO
Figura 4: El 68HC11 funcionando como maestro y como esclavo
MICROCONTROLADOR 68HC11: Fundamentos, recursos y programación. MICROBÓTICA
2.11. Pines de los puertos de E/S
La integración y la potencia de este microcontrolador obliga a un alto grado de multiplexación de las funciones que soporta, por tanto, si bien la cantidad de puertos existentes en el chip es grande y variada, estos se ven a veces desactivados ya que son utilizados para otros fines como comparadores, capturadores, control de transmisiones asíncronas, etc...de tal manera que el número de puertos netos, puede hasta resultar escaso para algunas aplicaciones. Esto, que siempre es dependiente del sistema en cuestión, tiene una sencilla solución ya que el 68HC11 está preparado para soportar diferentes tipos de expansiones.
Estructura general de los puertos.
Puerto A B C D E Bit 0 entrada salida bidireccional entrada entrada Bit 1 entrada salida bidireccional salida entrada Bit 2 entrada salida bidireccional bidireccional entrada Bit 3 salida salida bidireccional bidireccional entrada Bit 4 salida salida bidireccional bidireccional entrada Bit 5 salida salida bidireccional bidireccional entrada Bit 6 salida salida bidireccional − entrada Bit 7 bidireccional salida bidireccional − entrada
2.12. Pines de los buses
Cuando el microcontrolador se configura para funcionar en el modo extendido , es decir, con la capacidad de redireccionar 64K de memoria, se ve obligado a generar un bus de direcciones, uno de datos y uno de control. De esta manera, el 68HC11 deja que su CPU interna tenga acceso al exterior, por lo que a partir de aquí, de alguna manera, el microcontrolador comienza a funcionar como un microprocesador. Dicho "nuevo" microprocesador tiene una potencia razonable regida por un bus de datos de 8 bits, y un bus de direcciones de 16 bits, por lo que su espacio de direccionamiento es de 64Kbytes de memoria plana. Este mapa de memoria es plano y comparte espacio con los puertos que se incorporen a nuestro sistema y todos los registros internos de MCU. En caso de que se superpongan registros internos del microcontrolador con dispositivos externos como pueden ser secciones de memoria, etc... el gestionador de bus, da prioridad a los internos, dejando de lado los restantes. Mediante la utilización de la totalidad del PUERTO B, el micro lleva al exterior la PARTE ALTA DEL BUS DE DIRECCIONES, y por medio del PUERTO C se presenta al exterior de forma multiplexada la PARTE BAJA DEL BUS DE DIRECCIONES, y el BUS DE DATOS. Esta multiplexación obliga a tener que agregar un hardware adicional que permita poder separar ambos buses. Para esto se puede utilizar un registro tipo latch triestado (para no cargar el circuito) ya sea por flanco (74374) o por nivel (74373, recomendado por el fabricante). Con este latch se intercepta la salida del puerto c de tal forma que se capture la parte baja del bus de direcciones, y no se solape con el dato. Ahora bien, esta multiplexación viene regida por una señal perteneciente al bus de control llamada E. Por este pin se va a obtener una señal de reloj que es la que se entrega a los periféricos y que por tanto comanda el ciclo de bus del sistema, de tal forma que cuando dicha señal E se encuentra a nivel bajo, por el puerto B se direcciona la parte alta del bus A, y por el puerto C la parte baja, los cuales serán capturados en el latch. Finalmente, cuando E pase, en la segunda parte del ciclo del bus, al nivel alto, el puerto C presenta a su salida al bus de datos completando de esta forma la demultiplexación. En la figura 9 se muestra cómo realizar esta demultiplexación.
- ADO−AD7 : Señales de los buses (A y D) multiplexadas.
- A8−A15 : Señales de la parte alta del bus de direcciones (A).
- AS : Señal de validación de la dirección puesta en el bus A, la cual es muy útil para validar la captura del latch, ya que al activarse informa que el bus de direcciones está completo.(AS pertenece al bus de control)
XX