


TEMA 5.6
PROGRAMACIÓN NO LINEAL
5.6.1. INTRODUCCIÓN
5.6.2. CONCEPTOS BÁSICOS
5
.
6
.
3
.
MÉT
O
D
O
DE
N
E
W
T
ON
S
I
N
RE
S
TRI
CC
I
ON
E
S
5
.
6
.
3
.
OO
NWON
SN
SCCONS
5.6.4. MÉTODO DE NEWTON CON RESTRICCIONES. FUNCIONES DE
PENALIZACIÓN.

















Prepara tus exámenes y mejora tus resultados gracias a la gran cantidad de recursos disponibles en Docsity

Gana puntos ayudando a otros estudiantes o consíguelos activando un Plan Premium

Prepara tus exámenes
Prepara tus exámenes y mejora tus resultados gracias a la gran cantidad de recursos disponibles en Docsity
Prepara tus exámenes con los documentos que comparten otros estudiantes como tú en Docsity
Encuentra los documentos específicos para los exámenes de tu universidad
Estudia con lecciones y exámenes resueltos basados en los programas académicos de las mejores universidades
Responde a preguntas de exámenes reales y pon a prueba tu preparación
Consigue puntos base para descargar
Gana puntos ayudando a otros estudiantes o consíguelos activando un Plan Premium
Comunidad
Pide ayuda a la comunidad y resuelve tus dudas de estudio
Ebooks gratuitos
Descarga nuestras guías gratuitas sobre técnicas de estudio, métodos para controlar la ansiedad y consejos para la tesis preparadas por los tutores de Docsity
El método de Newton para solucionar problemas de programación no lineal sin restricciones. Se incluyen ejemplos con funciones cuadráticas separables y se discuten los conceptos básicos de gradiente y hessiano. Además, se mencionan los desafíos del algoritmo de Newton, como la existencia de múltiples mínimos locales y la convergencia a la solución global.
Tipo: Apuntes
1 / 30

Esta página no es visible en la vista previa
¡No te pierdas las partes importantes!
5.6.1. INTRODUCCIÓN5.6.2. CONCEPTOS BÁSICOS5.6.3. MÉTODO DE NEWTON SIN RESTRICCIONES5.6.3.
O^
O^
N^
W ON S N
S^
CC ON
S
5.6.4.
MÉTODO
DE
NEWTON
CON
RESTRICCIONES.
FUNCIONES
DE
PENALIZACIÓN.
TEMA 5.6. PROGRAMACIÓN NO LINEAL
modelo
matemático
o
problema
se
dice
que
pertenece
a
la
Un
modelo
matemático
o
problema
se
dice
que
pertenece
a
la
programación
no
lineal
si
la
función
objetivo
y/o
alguna
de
las
restricciones del problema son una función no lineal de las variables ded^
i ió
d l
bl^
li^
l ) Si l
f
ió^
bj ti
l
decisión (
modelo o problema no lineal
). Si la función objetivo y/o alguna
de las restricciones son no lineales y las variables sólo pueden tomarvalores enteros no negativos (
modelo o problema no lineal entero
entonces
el^
modelo
matemático
pertenecería
al^
campo
de
la
programación no lineal entera
Problemas de estas características surgen de forma inevitable en lasaplicaciones de ingeniería, tales como diseño y control óptimo, y enaplicaciones científicas. Además muchos problemas que se formulan comoaplicaciones científicas. Además muchos problemas que se formulan comolineales se convierten en no lineales cuando se tienen en cuenta economíasde escala (por ejemplo, costes no proporcionales a la cantidad).
ESTADÍSTICA Y OPTIMIZACIÓN
TEMA 5.6. PROGRAMACIÓN NO LINEAL
4
13
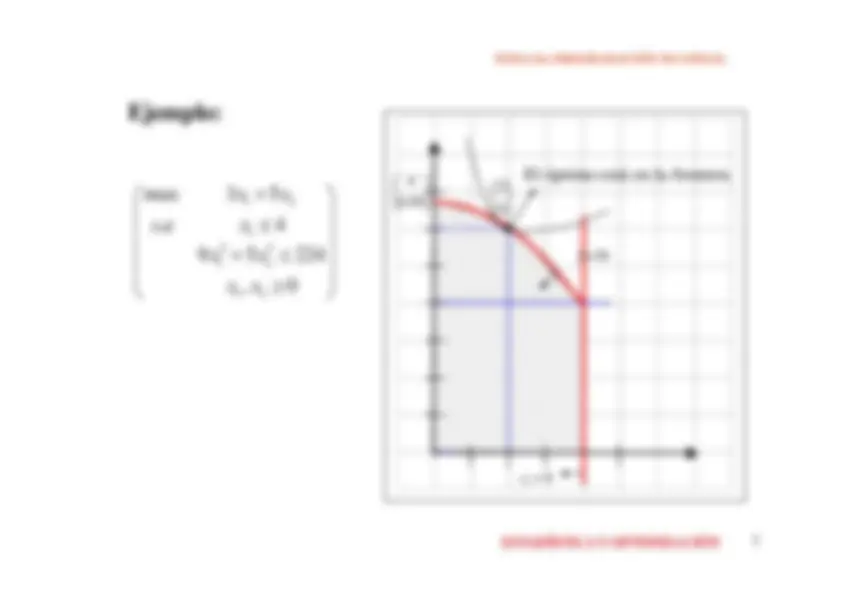
182 9
126 max
(^22) 2
(^21) 1
x
as
x x
x x
2
18 2 3
12 2
4
.
2 1
1 2^ x x
x x
as
Z=
0 6
6
(^8) ^3 ^5
^
^0 ,^ xx^21
4 ^
Z*=
^3 ^
Z= 0 4
ESTADÍSTICA Y OPTIMIZACIÓN
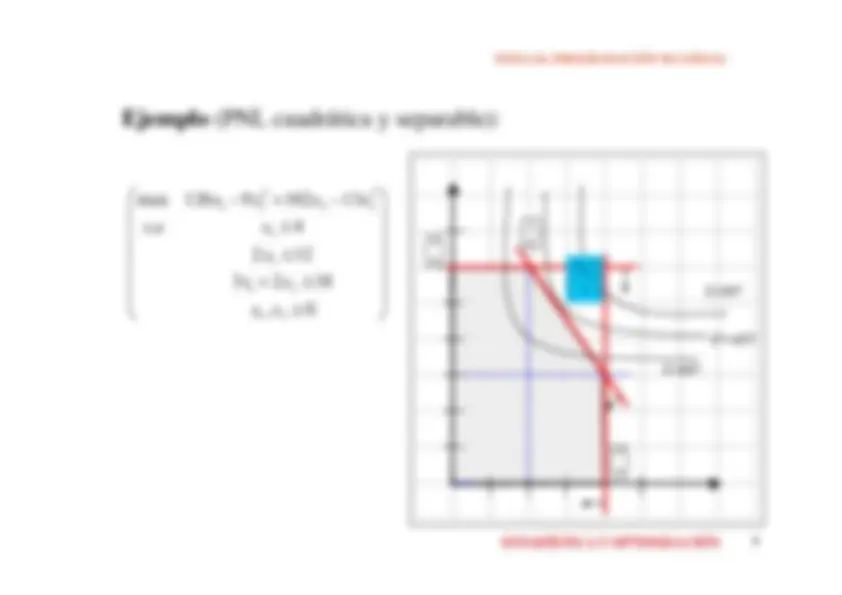
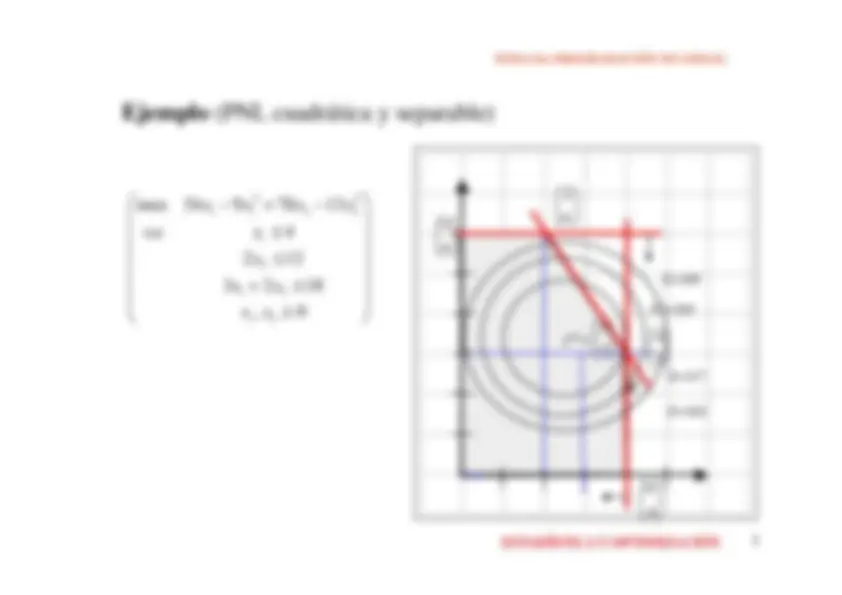
TEMA 5.6. PROGRAMACIÓN NO LINEAL
4
13 78 9 54 max
(^22) 2 (^21) 1
x
as
x x x x
0 ^
2 6
18 2 3
12 2
4
.
2 1
1 2^ x x
x x
as
6
Z=
^
^0 ,^ xx^21
4 ^ 3 ^
3 3
Z*=265^ ^ Z=117Z=162 (^0) 4
ESTADÍSTICA Y OPTIMIZACIÓN
TEMA 5.6. PROGRAMACIÓN NO LINEAL
Sin embargo, muchos problemas no lineales tienen óptimos localesúnicos
que,
por
definición,
necesariamente
deben
ser
globales.
Por
ejemplo las siguientes condiciones garantizan si existe que el óptimo esejemplo, las siguientes condiciones garantizan, si existe, que el óptimo esglobal:
f^
ió^
bj^
i^
d^
á i
ó^
l l
i^
d^
l
La función objetivo de máximo y cóncava, o el logaritmo de lafunción objetivo cóncava, con restricciones lineales.
2.^
La función objetivo de mínimo y convexa, con restriccioneslineales.
No obstante, cuando apliquemos el algoritmo de Newton, en general, noconoceremos
si
la
solución
obtenida
es
un
óptimo
global.
Como
consecuencia, se suele intentar la prueba de iniciar el algoritmo desdeconsecuencia, se suele intentar la prueba de iniciar el algoritmo desdediferentes
puntos
para
determinar
si
el
problema
tiene
diferentes
soluciones óptimas.
ESTADÍSTICA Y OPTIMIZACIÓN
TEMA 5.6. PROGRAMACIÓN NO LINEAL x
f^
^
) 0 ( 0
2
x
x^
^
) 0 ( 0 2
Función convexa (curvatura
Función cóncava (curvatura
hacia arriba)
Función cóncava (curvaturahacia abajo)
f(x)
f(x)( )
ESTADÍSTICA Y OPTIMIZACIÓN
Cuando las funciones del problema son
funciones diferenciables
, podemos aplicar
TEMA 5.6. PROGRAMACIÓN NO LINEAL
algoritmos de solución basados en las derivadas de la/s función/es. Dos conceptosbásicos asociados con las funciones diferenciables son el
gradiente
y el
hessiano
(para
el
cálculo
de
este
último
se
necesita
que
la
función
sea
dos
veces
(p^
q
diferenciable)Dada una función
f :^
n R
,^ se
define
el
gradiente
de
f ,^
f
,^ como
Dada
una
función
f :^
,^ se
define
el
gradiente
de
f ,^
f
,^ como
^
^
^
^
^
,..., 1
,..., 1 2
,..., 1 1
t xxnxn f
x xn xf xxnx f
: el gradiente de una función (campo) escalar indica en cada
t^
l^
di^
ió^
d^
á i
i^
i^
t^
d^
l^
i^
A i
i
l^
di^
t^
d
2
1
2 1
xn
x
x
punto la
di
rección de máximo crecimiento
de la misma. Asimismo, el gradiente de
una función en un punto es el
vector normal al hiperplano tangente
de la función
en dicho punto.Una
condición necesaria
para que un punto sea un máximo o mínimo (local) de
una función es que su gradiente sea cero en dicho punto, es decir que sea un
punto
10
estacionario
ESTADÍSTICA Y OPTIMIZACIÓN
TEMA 5.6. PROGRAMACIÓN NO LINEAL
Dada una función
f :^
n R
, se define el
hessiano
de
f ,^
Hf
, como
n
n
x,...,x xx f
x x
x ,...,x f
^
1 2
1 2
^
^
n
n
n x x
x ,...,x f
x x
x ,...,x f
xx
x x
n
1 2
1 2
1
1 1
2 1
n n
n^
x x
x x^
^
1
el^
hessiano
de
una
función
nos
sirve
para
dar
condiciones
suficientes
para que un punto estacionario de la función sea un
condiciones
suficientes
para que un punto estacionario de la función sea un
máximo o mínimo (relativo).
ESTADÍSTICA Y OPTIMIZACIÓN
TEMA 5.6. PROGRAMACIÓN NO LINEAL
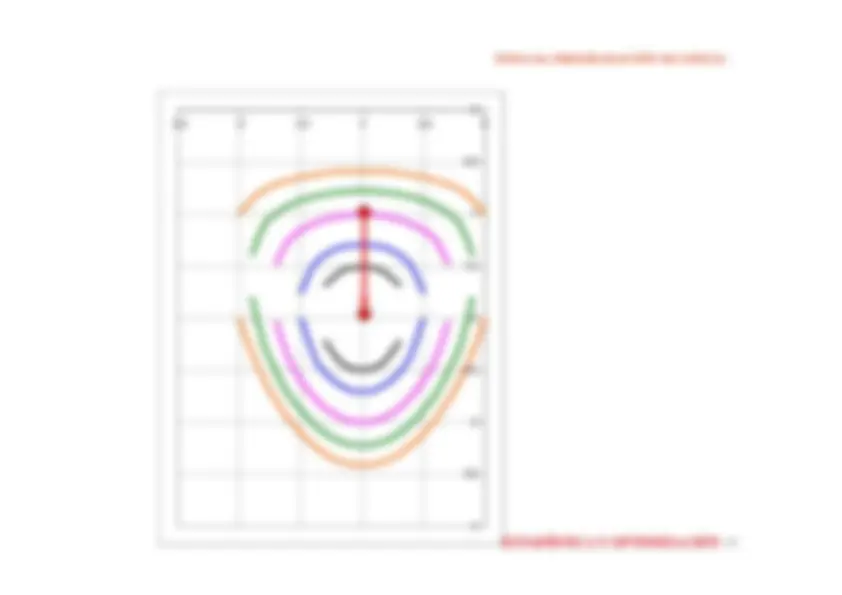
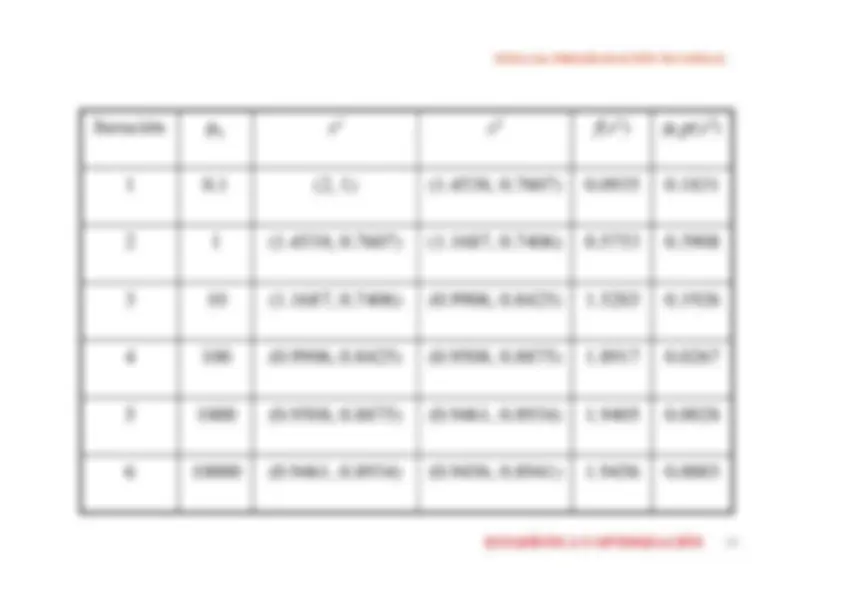
: resolver el siguiente PNL por el algoritmo de Newton.
2 4
epsilón =
0,
Iteración
x^
x^
Abs(f'(x1))
Abs(x2 - x1)
1
-3,
-2,
104,
0,
1
3,
2,
104,
0,
2
-2,
-1,
30,
0,
3
-1,
-0,
9,
0,
4
-0,
-0,
3,
0,
2
1
3 1 1
n
n
n n
,^
,^
,^
,
5
-0,
1,
1,
1,
6
1,
1,
1,
0,
7
1,
1,
0,
0,
8
1,
1,
0,
0,
9
1,
1,
0,
0,0000^13
ESTADÍSTICA Y OPTIMIZACIÓN
TEMA 5.6. PROGRAMACIÓN NO LINEAL
Microsoft Excel 10.0 Informe de respuestasHoja de cálculo: [Programación ni lineal.xls]Hoja5 Celda objetivo (Mínimo)
j^
(^
)
Celda
Nombre
Valor original
Valor final
$B$
FUNC.OBJ. Iteración
78
Celdas cambiantes
Ce
lda
Nombre
Valor original
Valor final
Ce da
o^
b e
a o
o
g
a
a o
a
$C$
X^
-^
0,
Restricciones
NINGUNA
ESTADÍSTICA Y OPTIMIZACIÓN
TEMA 5.6. PROGRAMACIÓN NO LINEAL
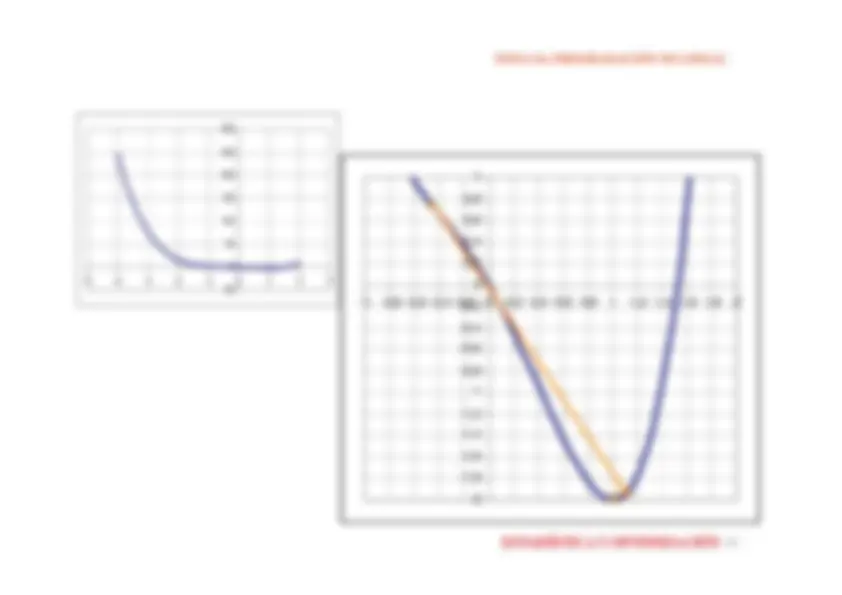
: resolver el siguiente PNL por el algoritmo de Newton.
^
^
^
^
^
5
4 3 2 1
^
x x x x xx
min
(^65433210) - -0,^
0
0,^
1
1,^
2
2,^
3
3,^
4
4,^
5
5,^
548 675 340 75 6
2 3 4 5
1
^
n n n n n^
x x x x x x x
-2^ -3 -4 -5 -
548
1350
1020 300 30
2
3 4
1
n
n
n n
n n^
x x x x x x
-7 -8 -9 -10 (^11) -11-12-13-14-
16
-16-17 -
ESTADÍSTICA Y OPTIMIZACIÓN
TEMA 5.6. PROGRAMACIÓN NO LINEAL
Microsoft Excel 10.0 Informe de respuestasHoja de cálculo: [Programación ni lineal.xls]Hoja6 Celda objetivo (Mínimo)
C^
f
Microsoft Excel 10.0 Informe de respuestasHoja de cálculo: [Programación ni lineal.xls]Hoja6 Celda objetivo (Mínimo)
C ld
N^
b^
V l
i^ i^
l^
V l
fi
l
Celda
Nombre
Valor original
Valor final
$C$
f(x)
720
-16,
Celdas cambiantes
Celda
Nombre
Valor original
Valor final
$C$
f(x)
4,
-3,
Celdas cambiantes
Celda
Nombre
Valor original
Valor final
Celda
Nombre
Valor original
Valor final
$B$
x^
-^
0,
RestriccionesNINGUNA
Celda
Nombre
Valor
original
Valor final
$B$
x^
3, 2,
RestriccionesNINGUNA
NINGUNA Microsoft Excel 10.0 Informe de respuestasHoja de cálculo: [Programación ni lineal.xls]Hoja
NINGUNA Microsoft Excel 10.0 Informe de respuestasHoja de cálculo: [Programación ni lineal.xls]Hoja6 C ld
bj ti
(Mí i
)
Celda objetivo (Mínimo)
Celda
Nombre
Valor original
Valor final
$C$
f(x)
2,
-3,
C ld
bi^
t
Celda objetivo (Mínimo)
Celda
Nombre
Valor original
Valor final
$C$
f(x)
4,
-16,
Celdas cambiantes
Celdas cambiantes
Celda
Nombre
Valor original
Valor final
$B$
x^
1,
2,
Restricciones
Celdas cambiantes
Celda
Nombre
Valor original
Valor final
$B$
x^
3,
4,
Restricciones
17
Restricciones^ NINGUNA
RestriccionesNINGUNA
ESTADÍSTICA Y OPTIMIZACIÓN
TEMA 5.6. PROGRAMACIÓN NO LINEAL
: resolver el siguiente PNL por el algoritmo de Newton.
2
2
y y xy y x max
3
2
2
2
^
2 2
)y ,x f (
^
2 2 2 ) ( ) (
2
2 2
y,x f y,x f
^
3 2 2
2 (^22)
y x x
y xy
)y ,x f( y
)y , ( x )y ,x (f
^
^
2 2 2
2 2 2 ) ( ) (
) (
) (
)) ((
2 2
(^22)
x
x y
y,x f y y,x f xy
y yx y x y,x f H
(^2) x =^ x
Hf
(^1) ( x
f
(^1) ( x
1
Hf
f
iter
12 12 1
f
iter
si estuviésemos minimizando ocurriría lo mismo, por lo que –
Hf
(^1) ( x
f
(^1) ( x ) no sería una
d d
di^
ió^
d^
d
verdadera dirección de descenso.
ESTADÍSTICA Y OPTIMIZACIÓN