


TRABAJO FINAL DE GRADO
TÍTULO: DISEÑO DE UN SIMULADOR ACTIVO DE UN PULMÓN PARA UN
RESPIRADOR MECÁNICO
AUTORES: CRUCIANI TOTI, RODOLFO OSCAR;
GRAU CLAVERO, JUDIT;
FECHA: Setiembre, 2016

























































































Prepara tus exámenes y mejora tus resultados gracias a la gran cantidad de recursos disponibles en Docsity

Gana puntos ayudando a otros estudiantes o consíguelos activando un Plan Premium

Prepara tus exámenes
Prepara tus exámenes y mejora tus resultados gracias a la gran cantidad de recursos disponibles en Docsity
Prepara tus exámenes con los documentos que comparten otros estudiantes como tú en Docsity
Encuentra los documentos específicos para los exámenes de tu universidad
Estudia con lecciones y exámenes resueltos basados en los programas académicos de las mejores universidades
Responde a preguntas de exámenes reales y pon a prueba tu preparación
Consigue puntos base para descargar
Gana puntos ayudando a otros estudiantes o consíguelos activando un Plan Premium
Comunidad
Pide ayuda a la comunidad y resuelve tus dudas de estudio
Ebooks gratuitos
Descarga nuestras guías gratuitas sobre técnicas de estudio, métodos para controlar la ansiedad y consejos para la tesis preparadas por los tutores de Docsity
ojbhiuhiu giugi ghib jjk lnlkj bhhrespìradfor artificial
Tipo: Apuntes
1 / 152

Esta página no es visible en la vista previa
¡No te pierdas las partes importantes!
FECHA: Setiembre, 2016
Cruciani Toti, Rodolfo Oscar; Grau Clavero, Judit APELLIDOS: GRAU CLAVERO NOMBRE: JUDIT TITULACIÓN: GRADO EN INGENIERIA ELECTRÒNICA INDUSTRIAL Y AUTOMÁTICA PLAN: GRADO DIRECTOR: GONZÁLEZ ROJAS, HERNÁN ALBERTO CODIRECTOR: RAYA GINER, CRISTOBAL DEPARTAMENTO: 712 – INGENIERÍ MECÁNICA; 707 - ENGINYERIA, SISTEMES, AUTOMÀTICA I INFORMÀTICA INDUSTRIAL APELLIDOS: CRUCIANI TOTI NOMBRE: RODOLFO OSCAR TITULACIÓN: GRADO EN INGENIERIA MECÀNICA PLAN: GRADO DIRECTOR: GONZÁLEZ ROJAS, HERNÁN ALBERTO CODIRECTOR: RAYA GINER, CRISTOBAL DEPARTAMENTO: 712 – INGENIERÍ MECÁNICA; 707 - ENGINYERIA, SISTEMES, AUTOMÀTICA I INFORMÀTICA INDUSTRIAL
Cruciani Toti, Rodolfo Oscar; Grau Clavero, Judit
Agradecimientos a nuestros tutores, Cristóbal Raya y Hernán González por el planteamiento de este proyecto y la ayuda recibida durante el desarrollo, a la universidad por el préstamo de los dispositivos electrónicos, así como talleres mecánicos y electrónicos para poder desarrollar el prototipo del pulmón, y al hospital Sant Joan de Déu de Barcelona que es el precursor de este proyecto. Por último, dar las gracias a nuestras familias por todo el apoyo y ánimos que nos han brindado a lo largo de toda la carrera.
Cruciani Toti, Rodolfo Oscar; Grau Clavero, Judit
Palabras clave (máximo 10): Simulación Educación profesional Sanidad Aprendizaje guiado Simulador pulmonar Pulmón Este proyecto impulsado por el Hospital Sant Joan de Déu de Barcelona, consiste en diseñar y elaborar un simulador capaz de representar el movimiento y el comportamiento un pulmón mecánico en estado activo y pasivo de un bebé recién nacido hasta un niño de 3 años de edad. La necesidad nace dentro de una de las principales limitaciones en el campo de la docencia sanitaria, ya que fuera de la simulación es difícil obtener una representación clara que no involucre ningún paciente real. Por este motivo, la realización de este proyecto permite sustituir o ampliar las experiencias reales a través de experiencias guiadas que pueden repetirse todas las veces que sean necesarias, para la educación o la investigación resulta un método muy eficaz para representar casos concretos de pacientes. El proyecto arranca con el diseño mecánico y electrónico del simulador, seguido por el montaje y las pruebas de cada uno de los componentes, para controlar su efectividad, y así finalmente enlazarlos para obtener la maqueta final. Por último, se programa y se comprueba su correcto funcionamiento. Finalmente se ha desarrollado el simulador de pulmón activo y pasivo automatizado acotado al rango de edad estimado donde los valores fisiológicos del paciente varían en función del volumen corriente de 50 a 200 cm3. Este dispositivo se controla mediante una aplicación Android, donde el usuario podrá elegir el modo de funcionamiento, el volumen corriente, la resistencia, la compliancia, la activación de la electroválvula para simular las pérdidas de aire de la intubación, y la frecuencia de respiración.
Cruciani Toti, Rodolfo Oscar; Grau Clavero, Judit
Este proyecto ha sido desarrollado conjuntamente entre los dos miembros participantes, ya que buscábamos la forma de interactuar lo máximo entre nosotros para poder aportar conocimientos de ambas carreras en todos los apartados y así hacer más completa la maqueta. Es cierto que en partes más específicas ha habido más trabajo electrónico o más trabajo mecánico, como, por ejemplo: Rodolfo Oscar Cruciani:
Cruciani Toti, Rodolfo Oscar; Grau Clavero, Judit ANEXO C: ESQUEMA ELECTRONICO .................................................................................... 151 ANEXO D: DATASHEET COMPONENTES .............................................................................. 151
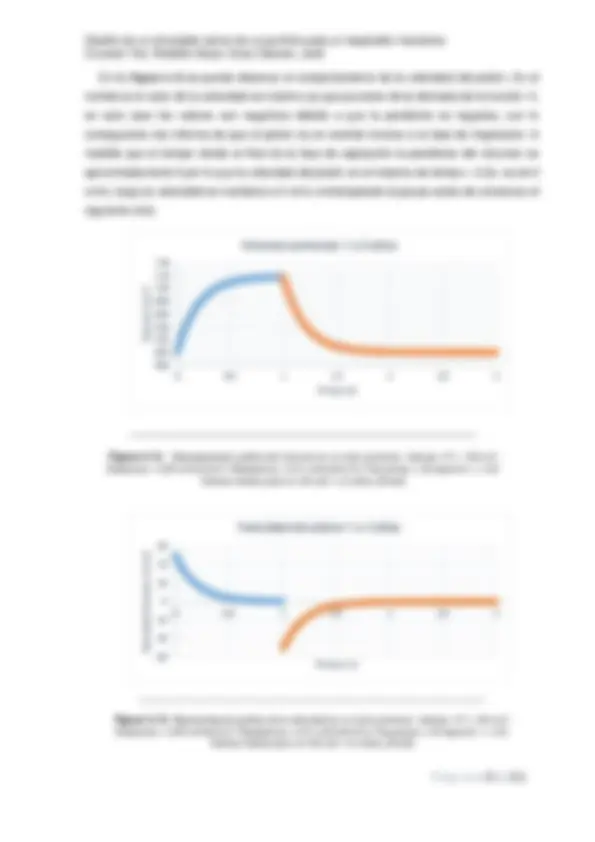
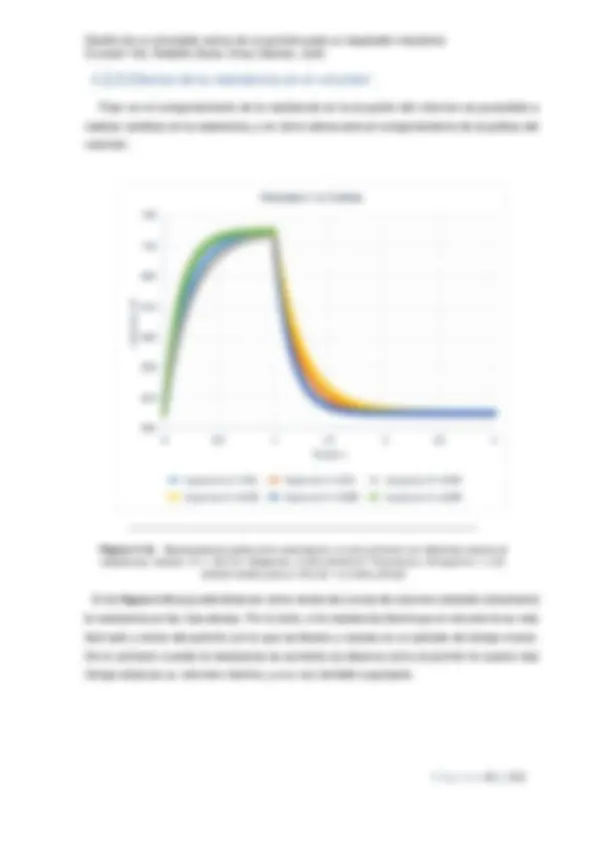
Cruciani Toti, Rodolfo Oscar; Grau Clavero, Judit capacidad inspiratoria; FRC: capacidad residual funcional; IVC: capacidad vital; TLC: capacidad pulmonar total. [3] 37 Figura 4.9. Duración del ciclo respiratorio 38 Figura 4.10. Representación gráfica de la ecuación (14) en el tiempo. Valores: 𝑉𝑇 = 120 cm^3 ; Elastancia = 0,05 cmH 2 O/cm^3 ; Resistencia = 0,01 cmH 2 O/cm^3 /s; Frecuencia = 20 resp/min; r = 0,5. Valores medios para un niño de 1 a 3 años. [Excel]. 41 Figura 4.11. Representación gráfica de la ecuación (4.22)en el tiempo. Valores: VT = 120 cm^3 ; Elastancia = 0,05 cmH 2 O/cm^3 ; Resistencia = 0,01 cmH 2 O/cm^3 /s; Frecuencia = 20 resp/min; r = 0,5. Valores medios para un niño de 1 a 3 años. [Excel]. 42 Figura 4.12. Representación gráfica de la ecuación (4.26) en el tiempo. Valores: VT = 120 cm^3 ; Elastáncia = 0,05 cmH 2 O/cm^3 ; Resistencia = 0,01 cmH 2 O/cm^3 /s; Frecuencia = 20 resp/min; r = 0,5. Valores medios para un niño de 1 a 3 años. [Excel]. 44 Figura 4.13. Representación gráfica de la ecuación ( 4.27 ) en el tiempo. Valores: VT = 120 cm^3 ; Elastancia = 0,05 cmH 2 O/cm^3 ; Resistencia = 0,01 cmH 2 O/cm^3 /s; Frecuencia = 20 resp/min; r = 0,5. Valores medios para un niño de 1 a 3 años. [Excel]. 44 Figura 4.14. Representación gráfica del volumen en un ciclo pulmonar. Valores: VT = 120 cm^3 ; Elastancia = 0,05 cmH 2 O/cm^3 ; Resistencia = 0,01 cmH 2 O/cm^3 /s; Frecuencia = 20 resp/min; r = 0,5. Valores medios para un niño de 1 a 3 años. [Excel]. 45 Figura 4.15. Representación gráfica de la velocidad en un ciclo pulmonar. Valores: VT = 120 cm^3 ; Elastancia = 0,05 cmH 2 O/cm^3 ; Resistencia = 0,01 cmH 2 O/cm^3 /s; Frecuencia = 20 resp/min; r = 0,5. Valores medios para un niño de 1 a 3 años. [Excel]. 45 Figura 4.16. Representación gráfica de la velocidad en un ciclo pulmonar con diferentes valores de resistencias. Valores: VT = 120 cm^3 ; Elastancia = 0,05 cmH 2 O/cm^3 ; Frecuencia = 20 resp/min; r = 0,5. Valores medios para un niño de 1 a 3 años. [Excel]. 46 Figura 4.17. Representación gráfica de la velocidad en un ciclo pulmonar con diferentes valores de compliancia. Valores: VT = 120 cm^3 ; Resistencia = 0,01 cmH 2 O/cm^3 /s; Frecuencia = 20 resp/min; r = 0,5. Valores medios para un niño de 1 a 3 años. [Excel]. 47 Figura 4.18. Tabla con valores predefinidos para el simulador pulmonar. [Excel] 49 Figura 5.1. Imagen del diseño base. 50 Figura 5.2. Motor reductor DOGA 111 12V 20W DC. ( http://www.sytrans.es/docs/cms/documento- 1 - 1349106651.pdf (Setiembre, 2016)) 51 Figura 5.3. Especificaciones del motor. [DOGA]. (http://www.sytrans.es/docs/cms/documento- 1 - 1349106651.pdf (Setiembre, 2016)) 52 Figura 5.4. Curvas características del motor DOGA 111. [DOGA] 53 Figura 5.5. Polea Dentada Z 27; a) Vista Isométrica; b) vista frontal [SolidWorks] 55
Figura 5.8. Dibujo de la disposición de las poleas y la correa dentada con cotas representativas; “d=diámetro de la polea menor; D = diámetro de la polea conductora;
Cruciani Toti, Rodolfo Oscar; Grau Clavero, Judit Figura 7.1. Pines usados para interrupciones en diferentes modelos de Arduino. ( http://www.sistemasymicros.com.co/manejo-de-interrupciones-en-arduino/ ) 109 Figura 7.2. Interrupción para contar pulsos y saber el sentido de giro [Arduino]. 110 Figura 7.3. Obtención de la velocidad de giro del motor a través del encoder incremental, tiempo de cálculo T= 200 ms. [Arduino]. 110 Figura 7.4. Graficas de velocidades; En azul velocidad real del motor y en naranja velocidad obtenida con el encoder. [Arduino Plotter]. 111 Figura 7.5. Obtención de la velocidad del motor aplicando un filtro paso bajo, tiempo de cálculo T=100ms [Arduino]. 111 Figura 7.6. Tabla de datos obtenidos del motor, para un cierto valor de PWM proporciona valores de revoluciones por minutos en sentido de giro horario y anti horario. [Excel]. 112 Figura 7.7. Representación graficas de las curvas PWM/RPM del motor DOGA. [Excel]. 113 Figura 7.8. Diagrama de flujo programación final. 114 Figura 7.9. Lecturas y cálculo de la presión atmosférica media con o sin la electroválvula [Arduino] 116 Figura 7.10. Declaración del módulo bluetooth [Arduino] 116 Figura 7.11. Tratamiento de datos recibidos [Arduino] 117 Figura 7.12. Programación de la fase de inspiración modo activo. [Arduino]. 117 Figura 7.13. Programación de la fase de espiración modo activo. [Arduino]. 118 Figura 7.14. Funcionamiento de un control PID 119 Figura 7.15. Implementación PID discreto en el Arduino [Arduino] 120 Figura 7.16. Programación del modo pasivo. 121 Figura 7.17. Significado códigos enviados por la aplicación Android al microprocesador 122 Figura 7.18. Diagrama de flujo del funcionamiento de la aplicación realizada. 123 Figura 8.1. Valores de parámetros establecidos para la simulación. [Excel]. 124 Figura 8.2. Pulsos de encoder. [Arduino]. 125 Figura 8.3. Medición manual del recorrido del pistón. [Excel]. 126 Figura 8.4. Movimiento del pistón secundario con la válvula abierta. 127 Figura 8.5. Velocidad del pulmón, a) resistencia normal, b) resistencia elevada, c) resistencia baja. [Arduino Plotter]. 128 Figura 8.6. Velocidad del pulmón, a) compliancia normal, b) compliancia aumentada, c) compliancia disminuida. [Arduino Plotter]. 129 Figura 8.7. Presión en la salida del pulmón. Sin filtrar [Arduino Plotter]. 130 Figura 8.8. Presión y PID en el modo pasivo [Arduino Plotter]. 131 Figura 8.9. C omprobación del volumen en modo pasivo, a) pulsos del pulmón, b) punto inicial pistón secundario, c) punto final pistón secundario. [Arduino]. 132
Cruciani Toti, Rodolfo Oscar; Grau Clavero, Judit 𝑃𝑝𝑜𝑙𝑒𝑎 Perímetro de la polea dentada 𝑃𝑅 propiedades resistivas 𝑝𝑡 Pulsos totales del encoder 𝑃𝑇 presión requerida para insuflar los pulmones 𝑝𝑣𝑢𝑒𝑙𝑡𝑎 Pulsos de encoder por vuelta 𝑃𝑊𝑀 Modulación por ancho de pulsos 𝑃𝑊𝑀𝐿 Modulación por ancho de pulsos giro horario 𝑃𝑊𝑀𝑅 Modulación por ancho de pulsos giro anti horario 𝑟 Radio de la polea grande 𝑅 Resistencia en las vías aéreas RV volumen residual 𝑅𝑥𝑏 Fuerza de reacción en x de la polea grande 𝑅𝑦𝑏 Fuerza de reacción en y de la polea grande 𝑆 Sección transversal de la correa dentada 𝑆𝑎 Sección transversal del acero 𝑆𝑐 Sección transversal del caucho 𝑡𝑖 tiempo de inspiración 𝑡𝑒 tiempo de espiración 𝑇𝑝𝑖𝑠𝑡𝑜𝑛 Fuerza generada por el pistón 𝑡𝑇𝑂𝑇 El tiempo de ciclo total TIR Tasa interna de rentabilidad TLC capacidad pulmonar total 𝑉̇ Flujo volumétrico 𝑉̈ aceleración de la masa pulmonar ∆𝑉̇ Diferencial de flujo volumétrico 𝑉𝑒 Volumen espirado 𝑉𝑖 Volumen inspirado 𝑉𝑒̇ Flujo espirado 𝑉𝑖̇ Flujo inspirado 𝑉𝑇 Volumen corriente VAN Valor actual neto VC capacidad vital 𝑣𝑝 Velocidad del pistón 𝑣𝑝𝑒 Velocidad del pistón en la fase de espiración 𝑣𝑝𝑖 Velocidad del pistón en la fase de inspiración 𝑣𝑝𝑚𝑎𝑥 Velocidad del pistón máxima 𝑋𝑟 Distancia recorrida del pistón
Cruciani Toti, Rodolfo Oscar; Grau Clavero, Judit 1 INTRODUCCIÓN En las últimas dos décadas, se ha estado implementando el uso generalizado de las simulaciones en la formación de los profesionales de las ciencias de la salud, ya sea de grado, postgrado u otro tipo de formación. En el área de la sanidad, la simulación consiste en exponer a un estudiante en un contexto que imite algún aspecto de la realidad clínica sin que lo sea. Esta técnica permite sustituir o ampliar las experiencias reales a través de experiencias guiadas, que evocan o replican aspectos sustanciales del mundo real, de una forma totalmente interactiva. Por este motivo surgido el concepto de la educación médica basada en las simulaciones, reconocida actualmente como una ayuda fundamental para asegurar el aprendizaje y mejorar la seguridad del paciente. En este proyecto como esta explicado en el resumen se diseñará, se implementará y se validará un simulador pulmonar mecánico para un bebé recién nacido hasta un niño de 3 años de edad y se desarrollará siguiendo el esquema de la Figura 1. 1. Figura 1. 1. Representación graficas de las curvas PWM/RPM del motor DOGA. [Excel].