



Semestre 2017 MSc. Ing. Fabián Jiménez López
Escuela de Ingeniería Electrónica –UPTC Tunja Control
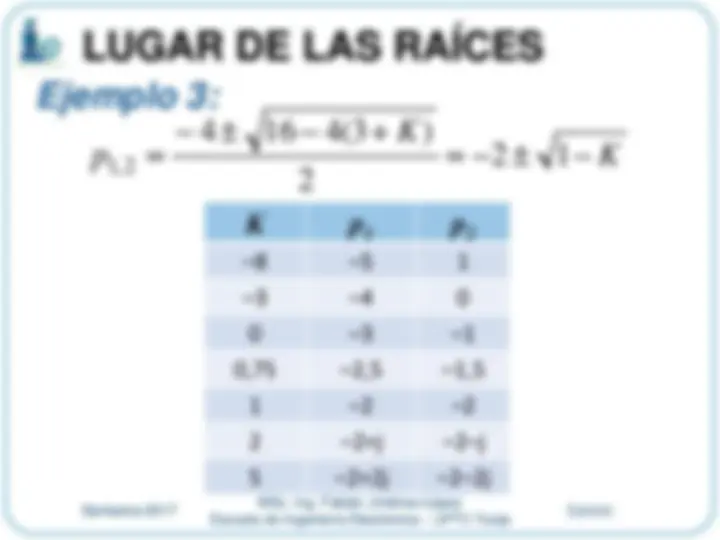
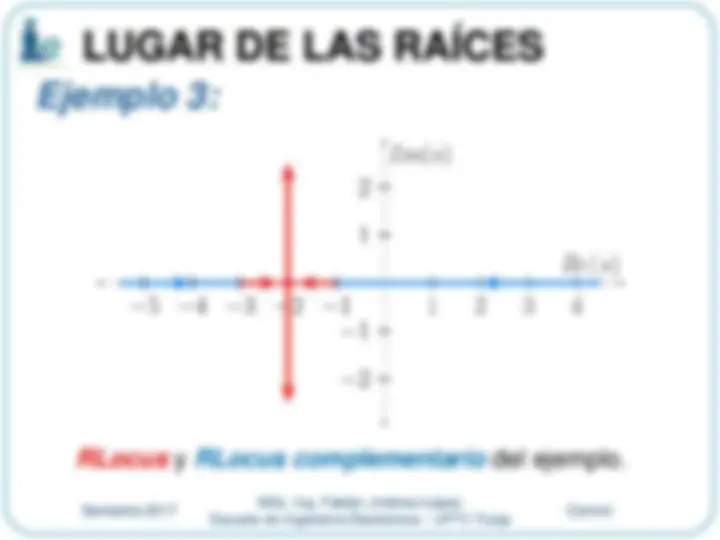
Ess y Rlocus
2017
Por: Fabián Jiménez López.
CONTROL ANALOGO Y
DIGITAL







Prepara tus exámenes y mejora tus resultados gracias a la gran cantidad de recursos disponibles en Docsity

Gana puntos ayudando a otros estudiantes o consíguelos activando un Plan Premium

Prepara tus exámenes
Prepara tus exámenes y mejora tus resultados gracias a la gran cantidad de recursos disponibles en Docsity
Prepara tus exámenes con los documentos que comparten otros estudiantes como tú en Docsity
Encuentra los documentos específicos para los exámenes de tu universidad
Estudia con lecciones y exámenes resueltos basados en los programas académicos de las mejores universidades
Responde a preguntas de exámenes reales y pon a prueba tu preparación
Consigue puntos base para descargar
Gana puntos ayudando a otros estudiantes o consíguelos activando un Plan Premium
Comunidad
Pide ayuda a la comunidad y resuelve tus dudas de estudio
Ebooks gratuitos
Descarga nuestras guías gratuitas sobre técnicas de estudio, métodos para controlar la ansiedad y consejos para la tesis preparadas por los tutores de Docsity
Explica como usar el comando rlocus para sistemas de control
Tipo: Diapositivas
1 / 82

Esta página no es visible en la vista previa
¡No te pierdas las partes importantes!
Semestre 2017 MSc. Ing. Fabián Jiménez López Control
CONTROL ANALOGO Y
DIGITAL
Semestre 2017 MSc. Ing. Fabián Jiménez López Control
AGENDA
Semestre 2017 MSc. Ing. Fabián Jiménez López Control
m m
m
m
m m
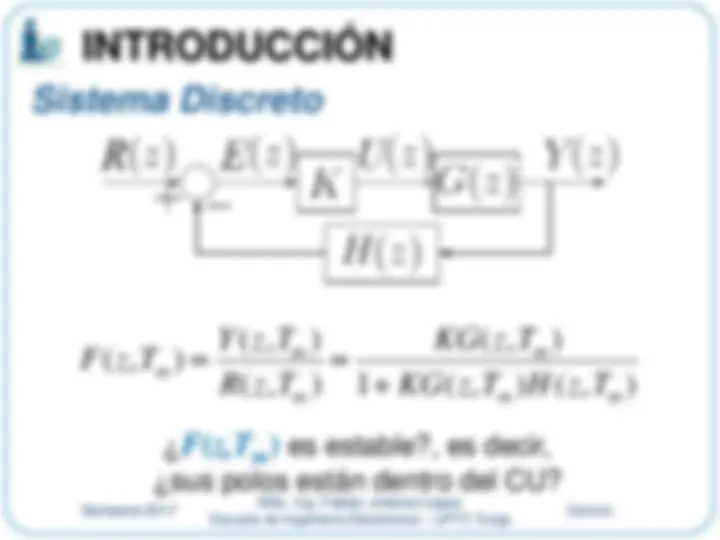
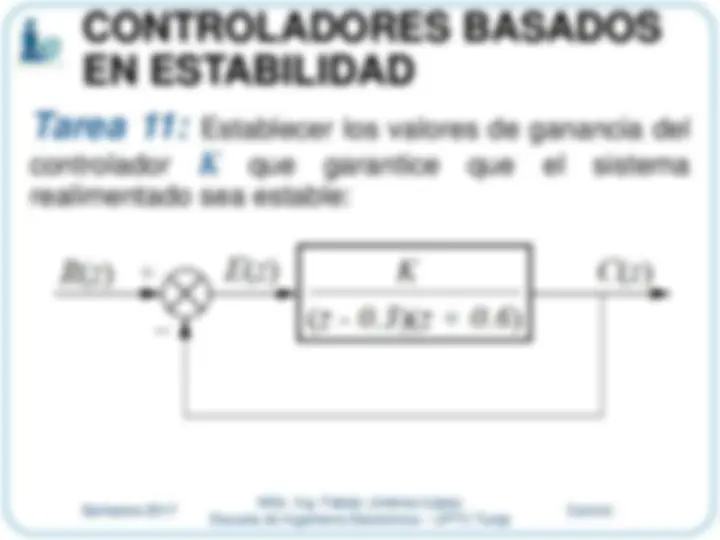
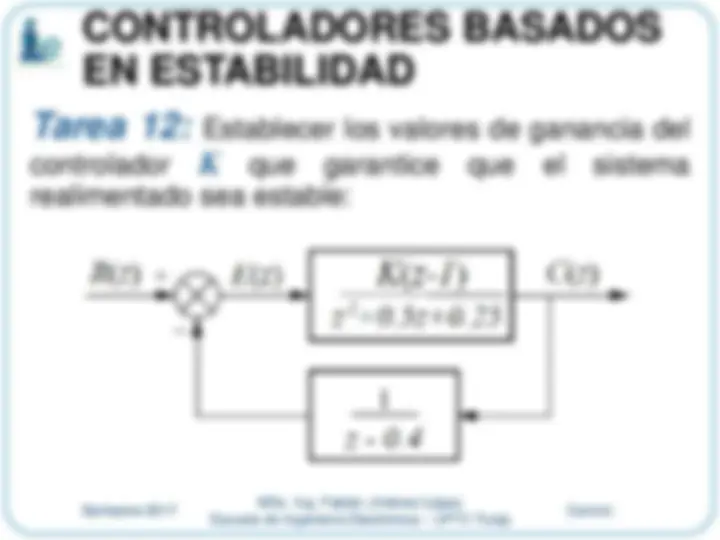
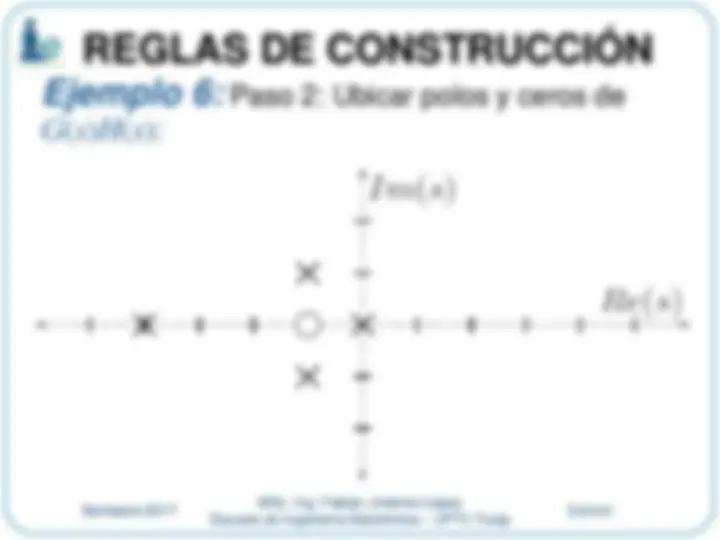
¿sus polos están dentro del CU?
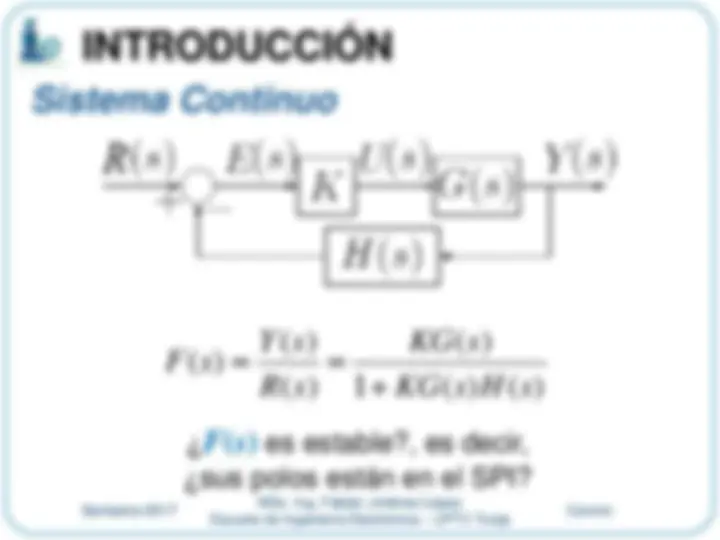
INTRODUCCIÓN
Semestre 2017 MSc. Ing. Fabián Jiménez López Control
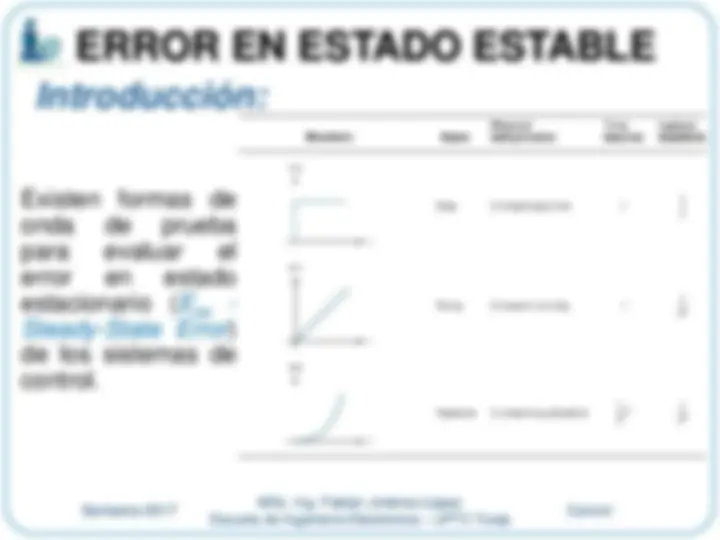
Existen formas de
onda de prueba
para evaluar el
error en estado
estacionario ( Ess -
Steady-State Error )
de los sistemas de
control.
Semestre 2017 MSc. Ing. Fabián Jiménez López Control
R s KG s H s
E s F s
KG s H s
KG s
R s
Y s F s
E
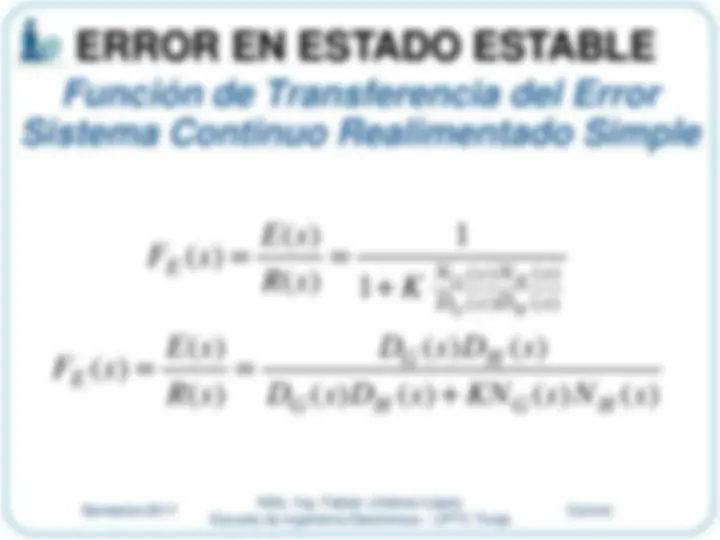
KG ( s ) es la Ganancia de Lazo y KG ( s ) H ( s ) es la Ganancia de
Lazo Cerrado
Semestre 2017 MSc. Ing. Fabián Jiménez López Control
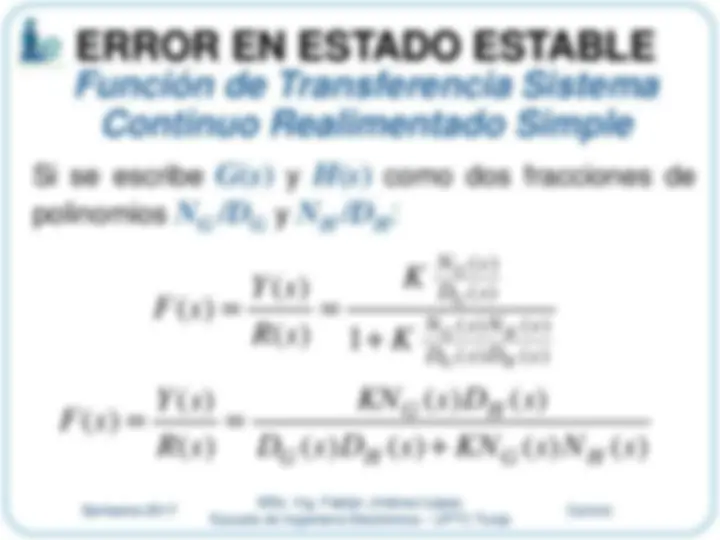
( ) ( ) ( ) ( )
( ) ( )
( )
( ) ( )
( ) 1
( ) ( )
( ) ( )
( ) ( )
( )
( )
D s D s KN s N s
KN s D s
R s
Y s F s
K
K
R s
Y s F s
G H G H
G H
D s D s
N s N s
D s
N s
G H
G H
G
G
= =
= =
Semestre 2017 MSc. Ing. Fabián Jiménez López Control
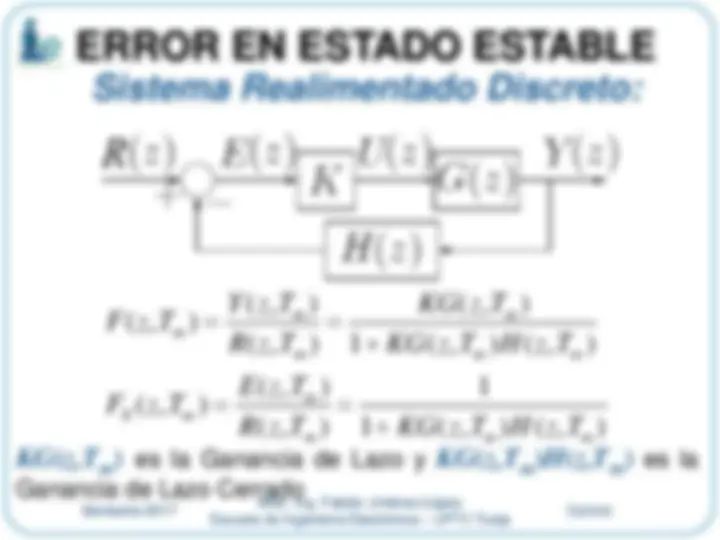
KG ( z,Tm ) es la Ganancia de Lazo y KG ( z,Tm ) H ( z,Tm ) es la
Ganancia de Lazo Cerrado
m m m
m E m
m m
m
m
m m
R z T KG z T H z T
E z T F z T
KG z T H z T
KG z T
R z T
Y z T F z T
Semestre 2017 MSc. Ing. Fabián Jiménez López Control
( , ) ( , ) ( , ) ( , )
( , ) ( , )
( , )
( , ) ( , )
( , ) 1
( , ) ( , )
( , ) ( , )
( , ) ( , )
( , )
( , )
G m H m G m H m
G m H m
m
m m
D zT D zT
N zT N zT
D z T
N zT
m
m m
D z T D z T KN z T N z T
KN z T D z T
R z T
Y z T F z T
K
K
R z T
Y z T F z T
G m H m
G m H m
G m
G m
= =
= =
Semestre 2017 MSc. Ing. Fabián Jiménez López Control
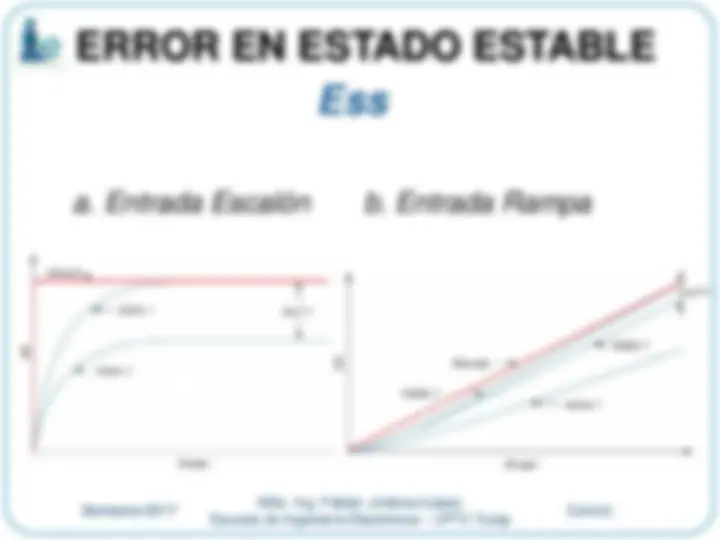
Ess
a. Entrada Escalón b. Entrada Rampa
Semestre 2017 MSc. Ing. Fabián Jiménez López Control
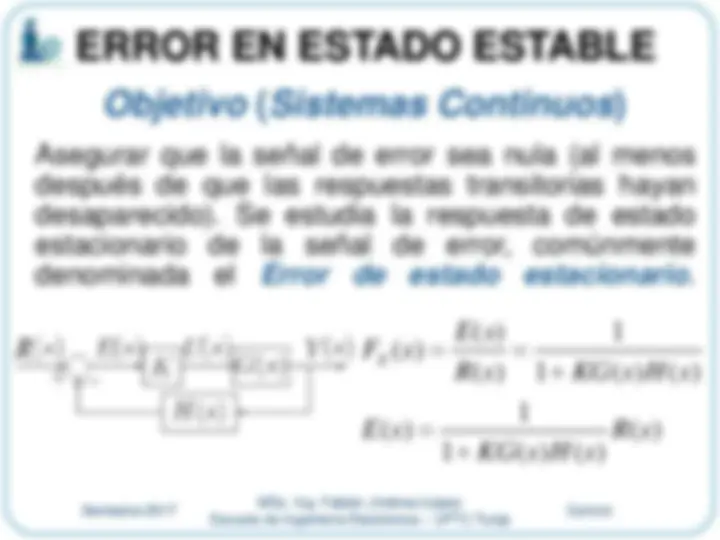
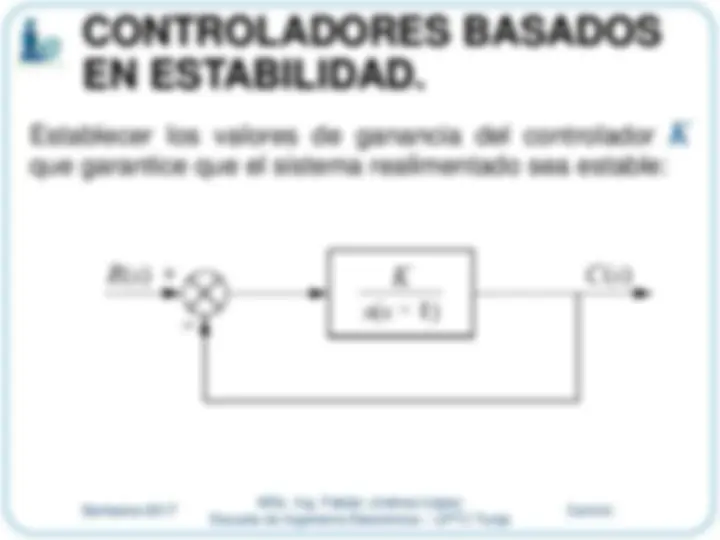
Asegurar que la señal de error sea nula (al menos
después de que las respuestas transitorias hayan
desaparecido). Se estudia la respuesta de estado
estacionario de la señal de error, comúnmente
denominada el Error de estado estacionario.
R s KG s H s
E s
R s KG s H s
E s FE s
Semestre 2017 MSc. Ing. Fabián Jiménez López Control
El Ess podrá ser 0 , ∞ o un valor finito, dependiendo
del número del tipo del sistema a analizar y de la
= → ( ) ( ) ( ) ( ) ( )
( ) ( ) lim 0 R s D s D s KN s N s
D s D s
E s
G H G H
G H ss s
Semestre 2017 MSc. Ing. Fabián Jiménez López Control
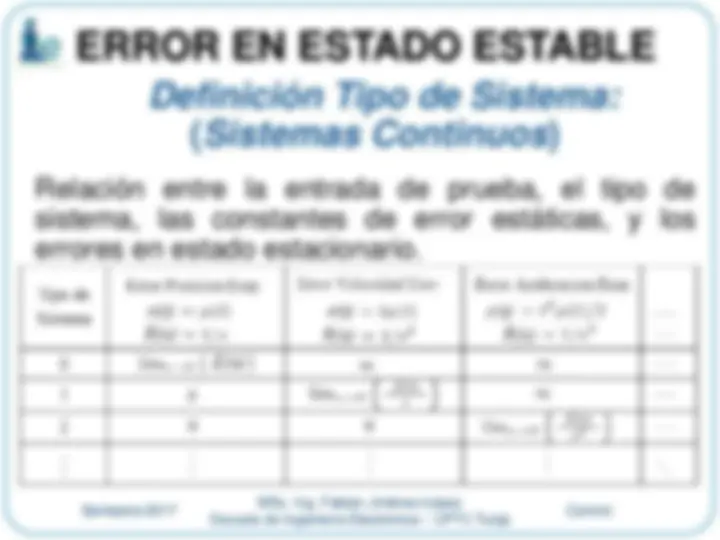
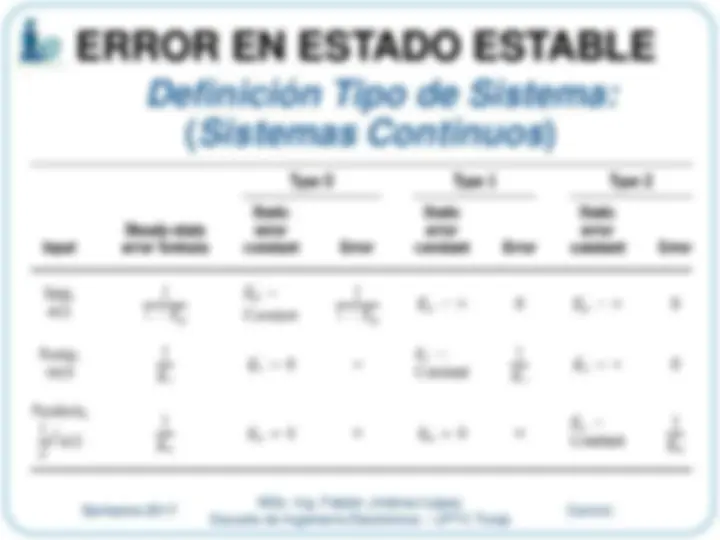
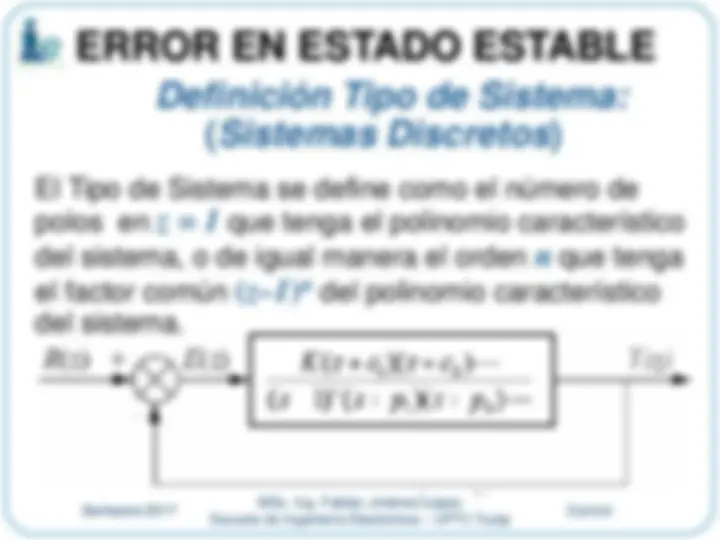
El Tipo de Sistema se define como el número de
n del polinomio característico del
sistema.
Semestre 2017 MSc. Ing. Fabián Jiménez López Control
Semestre 2017 MSc. Ing. Fabián Jiménez López Control
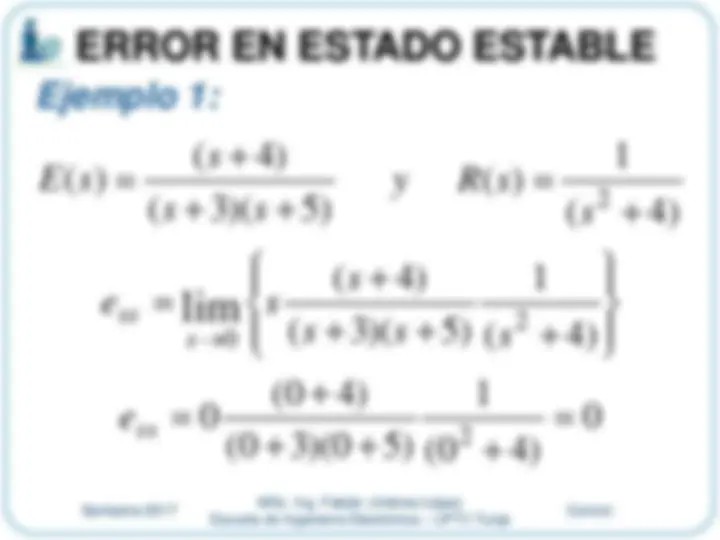
2
2 0
2
→
ss
s
ss