



Stability & Control
Aerospace Science & Technology
F. Mellibovsky
Escola d’Enginyeria de Telecomunicaci´o i Aeron`autica de Castelldefels
Universitat Polit`ecnica de Catalunya
March 2, 2011

Prepara tus exámenes y mejora tus resultados gracias a la gran cantidad de recursos disponibles en Docsity

Gana puntos ayudando a otros estudiantes o consíguelos activando un Plan Premium

Prepara tus exámenes
Prepara tus exámenes y mejora tus resultados gracias a la gran cantidad de recursos disponibles en Docsity
Prepara tus exámenes con los documentos que comparten otros estudiantes como tú en Docsity
Encuentra los documentos específicos para los exámenes de tu universidad
Estudia con lecciones y exámenes resueltos basados en los programas académicos de las mejores universidades
Responde a preguntas de exámenes reales y pon a prueba tu preparación
Consigue puntos base para descargar
Gana puntos ayudando a otros estudiantes o consíguelos activando un Plan Premium
Comunidad
Pide ayuda a la comunidad y resuelve tus dudas de estudio
Ebooks gratuitos
Descarga nuestras guías gratuitas sobre técnicas de estudio, métodos para controlar la ansiedad y consejos para la tesis preparadas por los tutores de Docsity
Asignatura: Tecnologia Aeroespacial, Profesor: Fernando Mellivobsky, Carrera: Enginyeria de Sistemes Aeroespacials, Universidad: UPC
Tipo: Apuntes
1 / 34

Esta página no es visible en la vista previa
¡No te pierdas las partes importantes!
F. Mellibovsky
Escola d’Enginyeria de Telecomunicaci´o i Aeronautica de Castelldefels Universitat Politecnica de Catalunya
March 2, 2011
Basic Concepts
Longitudinal Flight Longitudinal Equations Longitudinal Equilibrium Longitudinal Balance Longitudinal Stability Static Stability Dynamic Stability
Lateral Flight Lateral Equations Lateral Equilibria Lateral Stability Static Stability Dynamic Stability
I (^) Flight Equilibria: All forces and moments are balanced I (^) Flight Parameters: Speed, ascent/descent rate, turn radius... I (^) Aircraft Control / Piloting: Ability to prescribe flight parameter values and modify equilibria I (^) Performances: Equilibrium optimisation I (^) Flight Dynamics: Response to unbalanced force/moment I (^) Time-evolution of flight parameters I (^) Stability I (^) Stability conditions: Unstable, Neutral, Stable I (^) Static Stability: Initial response to perturbation Restoring Force I (^) Dynamic Stability: Dynamical behaviour Restoring Force Damping Force I (^) Handling & Flying Qualities: Dynamical response optimisation I (^) Manoeuvrability: Response celerity to command input I (^) Stability Augmentation: Automatic Control
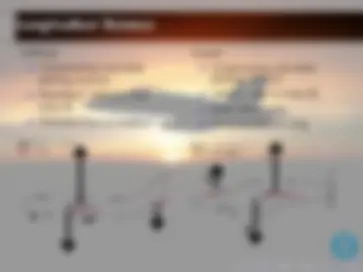
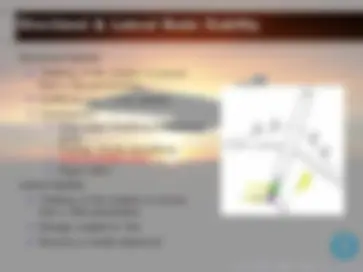
Angular velocities: I (^) x: p (roll) I (^) y: q (pitch) I (^) z: r (yaw) Aerodynamic forces: I (^) xa: −D (drag) I (^) y: FY (lateral force) I (^) za: −L (lift) Aerodynamic Moments & Commands: I (^) x: Ml , δl I (^) y: Mm, δm I (^) z: Mn, δn
symmetryplane
"wings"plane
Secondary Control Surfaces I (^) High-Lift Devices: I (^) flaps, slats, slots I (^) Trim tabs: I (^) elevator trim I (^) rudder and aileron trims (large aircraft) I (^) Spoiler / Air Brakes I (^) Others: flaperons, stabilators... Flight Control Systems: I (^) Mechanical I (^) Hydro-mechanical I (^) fly-by-wire
Empennage: I (^) Tailplane: I (^) Horizontal Stabiliser I (^) Elevator I (^) Elevator trim tab I (^) Fin: I (^) Vertical Stabiliser I (^) Rudder I (^) Combined: V-tail (with ruddervators) Canards I (^) Lifting-canard I (^) Control-canard Winglets
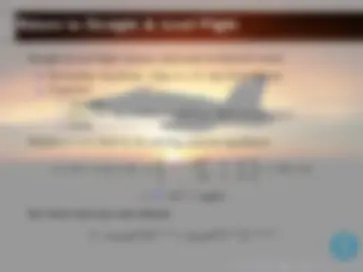
Hypothesis: I (^) Aircraft reflexion-symmetry plane is vertical −→ φ = 0 I (^) No roll or yaw rotation velocities −→ p = r = 0 I (^) Aerodynamic Forces within the symmetry plane −→ β = 0 I (^) Propulsion Forces parallel to the symmetry plane I (^) Aerodynamic Moment orthogonal to the symmetry plane I (^) Propulsion Moments orthogonal to the symmetry plane Consequences: I (^) Longitudinal Equations decoupled I (^) Flight occurs in the vertical plane
Equations (aerodynamic axes projection): I (^) Propulsion equation (P): m V˙ = − 12 ρSV 2 CD + T cos α − mg sinγ I (^) Lift equation (L): −mV γ˙ = − 12 ρSV 2 CL−T sin α + mg cos γ I (^) Pitching Moment equation (Q): Iy q˙ = 12 ρSlV 2 Cm+MT I (^) Pitch Velocity equation (QV): α˙ + ˙γ = q I (^) Altitude equation (H): h˙ = V sin γ Simplifying Hypothesis: I (^) T~ and V~ parallel −→ P and L decouple regarding T I (^) MT = 0 −→ P and Q decouple regarding T I (^) Small γ (cos γ ' 1, sin γ ' γ) −→ P and L decouple regarding γ
Centre of Lift (xL): I (^) Place where Lift is Applied I (^) No Pitching Moment Cm(xL) = 0 I (^) Changes with α
Aerodynamic Centre (xAC ): I (^) Where Lift change is applied I (^) Constant Pitching Moment (∂Cm/∂α)(xAC ) = 0 I (^) Fairly independent of α
Pitching Moment Coefficient (with respect to xG ):
Cm = Cmα (α − α 0 ) = Cm 0 + Cmα α
Pitching Moment Gradient Model:
Cmα =
xAC − xG l
CLα
but the aircraft is yet to be balanced...
I (^) Elevators (stick or yoke command): δm I (^) Modify lift (small effect): CL = CLα (α − α 0 ) + CLδm δm I (^) Modify pitching moment: Cm = Cm 0 + Cmα α + Cmδm δm I (^) Q: Cm = Cm 0 + Cmα α + Cmδm δm = 0 I (^) δm ↔ α: δm = −(Cm 0 + Cmα α)/Cmδm I (^) Depends on: centering (xG − xAC ) I (^) Independent of: h, V , γ, m I (^) To sustain α: elevator trim (secondary control surface). I (^) Pitching moment due to engine axis neglected.
I (^) L: mg cos γ = 12 ρSV 2 CL(α) −→ V 2 (α − α 0 ) = ct I (^) α ↔ V I (^) Depends on: h, m I (^) Independent of: centering (xG − xAC ) I (^) P: T = 12 ρSV 2 CD (α) + mg γ −→ ∆T (δx ) = mg ∆γ I (^) δx ↔ γ I (^) Depends on: h, m, V I (^) Independent of: centering (xG − xAC ) I (^) P/L: T = mg (1/E + γ) I (^) V ↔ γ I (^) Depends on: h, m, V , Regimes I (^) Independent of: centering (xG − xAC )
I (^) Power setting: δx ↔ γ I (^) Elevator deflection: δm ↔ α ↔ V ↔ γ Flight Regimes: T − D = mg γ I (^) R1: ∆V · ∆γ < 0 I (^) R2: ∆V · ∆γ > 0
Drag (Required Thrust) vs. Speed:
D = DP + Di = AD V 2 + BD /V 2
ρSCD 0 BD =
kW 2 1 2 ρS Power vs. Speed:
P = PP + Pi = AD V 3 + BD /V
Available Thrust:
T (δx ) = kT ρV λT^ δx
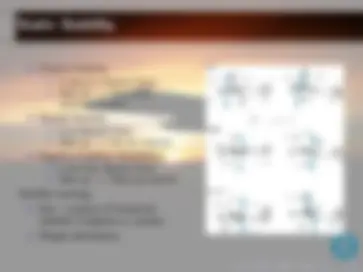
I (^) Five longitudinal equations I (^) Three longitudinal modes: I (^) Pitching Oscillation: oscillatory, involving I (^) α: angle of attack I (^) q: pitch angular velocity I (^) Phugoide: oscillatory, involving I (^) V : velocity I (^) γ: slope I (^) Return to straight & level flight: aperiodic, involving I (^) h: altitude
Pitching oscillation (α ↔ q) with respect to a point ahead of G
I (^) Decoupling Hypothesis: V , h ' ct I (^) Spring / Restoring effect: Cmα (pitching moment due to α) I (^) Damping effect: Cmq (horizontal stabiliser), CLα (wing) I (^) Properties I (^) Short period: ωn = V
√ 1 2 ρSl/Iy
√ −Cmα = (1/ρx )
√ g (xG − xAC )
√ CLα /CL I (^) Stable while periodic, then aperiodic, then unstable I (^) Static margin ms = (xAC − xG )/l: G forward → ω ↑, constant damping I (^) Attention to Pilot-Induced Oscillations! Do not try to pilot it!