Informe de Laboratorio
Implementación PACKML – ROBODK a través de Codesys-RPI
Informe de Laboratorio
Implementación PackML con Raspberry PI-Codesys (RoboDK)
Felipe Andrés Aguirre Hernández Cod:20181383011
Eddy Mauricio Suarez Molina Cod:20172383011
INTRODUCCIÓN
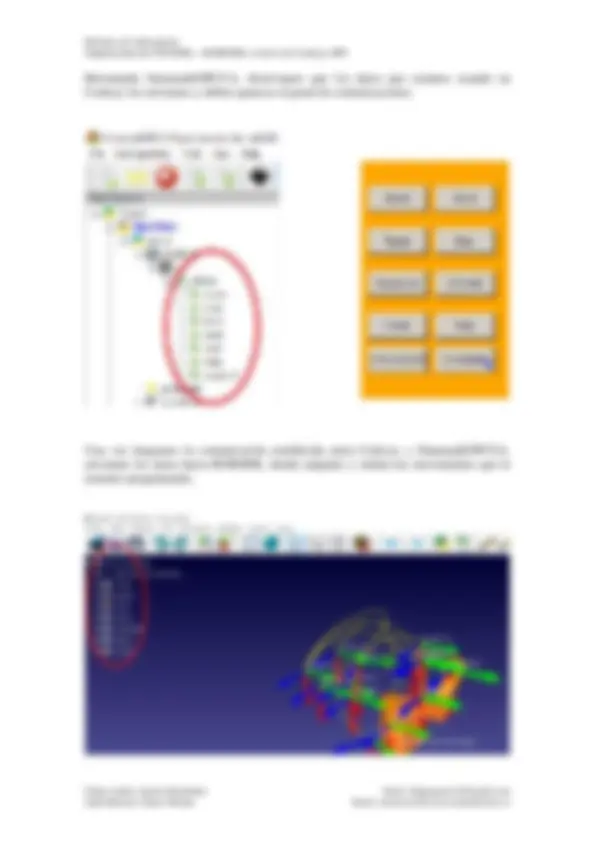
Se implementó un proceso Batch Discreto (Motion), usando Codesys V14, dónde se
establece una comunicación entre Codesys, SimunatikOPCUA y Simunatik3D, hasta la
aplicación de RoboDK. En Codesys se incorpora la estructura de un proceso Batch
Discreto usando PACKML, que define una máquina de estados implementada en MatLab
y la exportamos.
En PACKML definimos dos estados de fase, establecidos de la siguiente forma: START,
que es usado para que el brazo mecánico haga el proceso de “tapar la botella” y
ABORTING, que es usado para que el brazo mecánico retire la tapa de la botella, en caso
de emergencia. El proceso es autónomo y detecta las fallas durante el desarrollo y actúa
de inmediato hacia la FASE.
PROCESO A REALIZAR