Scarica coniche determinante e mantrici e più Dispense in PDF di Geometria Lineare solo su Docsity!
Fissiamo nel piano un sistema di riferimento cartesiano ortogonale O , ~ x , ~ y , u.
Definizione
Una conica è il luogo dei punti, propri o impropri, reali o immaginari, che con le loro coordinate omogenee (x ′ , y ′ , t′) soddisfano un’equazione di secondo grado omogenea nelle variabili x ′ , y ′ , t′:
a 11 x ′^2 + 2 a 12 x ′y ′^ + a 22 y ′^2 + 2 a 13 x ′t′^ + 2 a 23 y ′t′^ + a 33 t′^2 = 0_._
Per considerare i punti propri della conica teniamo conto del fatto che x = x^
′ t ′^ e^ y^ =^
y ′ t ′^. Allora, dividendo per^ t
′^2 :
a 11
x ′^2 t′^2
x ′ t′
y ′ t′^
y ′^2 t′^2
x ′ t′^
y ′ t′^
⇒ a 11 x 2 + 2 a 12 xy + a 22 y 2 + 2 a 13 x + 2 a 23 y + a 33 = 0_._
Questa è l’equazione della conica in forma non omogenea.
Ad ogni conica associamo la matrice simmetrica:
B =
a 11 a 12 a 13 a 12 a 22 a 23 a 13 a 23 a 33
.
Se poniamo:
x ′^ =
x ′ y ′ t′
e^ x^ =
x y 1
,
allora l’equazione della conica può essere scritta in forma compatta. La forma omogenea può essere scritta in questo modo:
tx ′Bx ′ (^) = 0 ,
mentre quella non omogenea in quest’altro:
tx Bx = 0_._
Se a 11 = a 12 = a 22 = 0, allora la conica è riducibile e contiene la retta impropria t′^ = 0. Supponiamo a 11 6 = 0. Dividiamo l’equazione per y ′^2 :
a 11
( x ′ y ′
) 2
x ′ y ′^
In questo caso otteniamo i punti impropri (−a 12 +
√ a^212 − a 11 a 22 , a 11 , 0 ) e
(−a 12 −
√ a 122 − a 11 a 22 , a 11 , 0 ).
Se a 11 = 0, abbiamo: { 2 a 12 x ′y ′^ + a 22 y ′^2 = 0 t′^ = 0_._
e otteniamo i punti impropri ( 1 , 0 , 0 ) e (a 22 , − 2 a 12 , 0 ).
In ogni caso, si ottiene che i punti impropri di una conica che non contiene la retta impropria sono sempre 2 e sono:
I (^) reali e distinti se a^212 − a 11 a 22 > 0 I (^) reali e coincidenti se a^212 − a 11 a 22 = 0 I (^) immaginari e coniugati se a^212 − a 11 a 22 < 0_._
Definizione
Una conica irriducibile si dice:
I (^) iperbole, se ha due punti impropri reali e distinti I (^) parabola, se ha due punti impropri reali e coincidenti I (^) ellisse, se ha due punti impropri immaginari e coniugati.
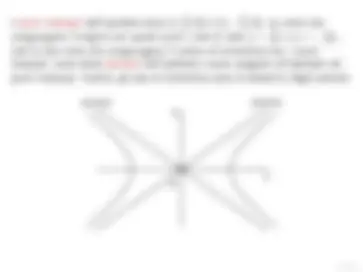
Fissiamo nel piano due sistemi di riferimento O , ~ x , ~ y , u e O′ , X ~ , Y ~ , u. Sia P = (x , y ) un punto del piano. Se vogliamo passare da O′ , X ~ , Y ~ a O , ~ x , ~ y occorre effettuare una rototraslazione, cioè una composizione tra una rotazione e una traslazione: {
x = X cos θ − Y sen θ + a y = X sen θ + Y cos θ + b ,
dove O′^ = (a , b) in O , ~ x , ~ y e θ è l’angolo formato da ~ i e ~ I.
~ x
~ y
O
O′
~ i
Y^ ~
X^ ~
~ I
θ
Se:
x =
x y 1
e X =
X
Y
,
allora le equazioni del cambiamento di coordinate si possono scrivere nella forma: x = QX ,
con:
Q =
cos θ − sen θ a sen θ cos θ b 0 0 1
matrice della rototraslazione.
Se θ = 0, allora abbiamo una traslazione.
~ x
~ y
O
O′
Y^ ~
X^ ~
Le equazioni di una traslazione sono: { x = X + a y = Y + b_._
Teorema
Data una conica Γ a coefficienti reali di equazione t x Bx = 0 , è sempre possibile effettuare una rototraslazione, di matrice Q, tale che Γ nel nuovo riferimento O′ , X ~ , Y ~ , u abbia una delle due forme:
I) α X 2 + β Y 2 = γ II) β Y 2 = 2 γ X.
Inoltre, dette B e A la matrice della conica e la sottomatrice dei termini di secondo grado in x e y , rispettivamente, e B′^ e A′^ le corrispondenti matrici per la conica in forma canonica, si ha:
a) B e B′^ hanno lo stesso determinante e lo stesso rango b) A e A′^ sono simili, e, quindi, hanno lo stesso polinomio caratteristico, stesso determinante e stessa traccia.
Osservazione
Se:
A =
( a 11 a 12 a 12 a 22
) ,
allora Tr(A) = a 11 + a 22 è la traccia di A. (^) 11 / 41
Studio dell’ellisse in forma canonica
L’equazione canonica dell’ellisse reale è del tipo:
x 2 a^2
y 2 b^2
Essa rientra tra le coniche del tipo I α x 2 + β y 2 = γ , con αγ = (^) a^12 e βγ = (^) b^12. L’equazione canonica dell’ellisse immaginaria è:
x 2 a^2
y 2 b^2
Notiamo che per l’ellisse reale Tr(A) · |B| < 0, mentre per l’ellisse immaginaria Tr(A) · |B| > 0.
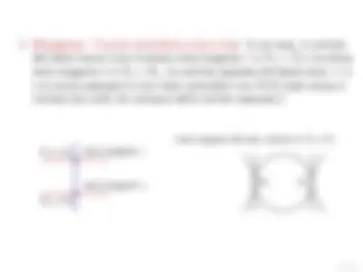
- L’origine O = ( 0 , 0 ) è il centro di simmetria, perché se ( α, β ) ∈ Γ =⇒ (− α, − β ) ∈ Γ.
- L’asse ~ x è asse di simmetria, perché se ( α, β ) ∈ Γ =⇒ ( α, − β ) ∈ Γ.
- L’asse ~ y è asse di simmetria, perché se ( α, β ) ∈ Γ =⇒ (− α, β ) ∈ Γ.
~ x
~ y
O
( α, β )
( α, − β )
(− α, β )
(− α, − β )
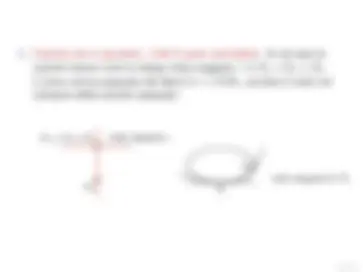
Sia a > b. In tal caso, consideriamo i punti F 1 = (c , 0 ) e F 2 = (−c , 0 ), con c =
a^2 − b^2. F 1 e F 2 sono detti fuochi dell’ellisse. Si dimostra che l’ellisse si può ottenere come il luogo dei punti P = (x , y ) del piano tali che: PF 1 + PF 2 = 2 a_._
Le rette d 1 : x = a
2 c e^ d^2 :^ x^ =^ −^
a^2 c sono dette direttrici relative ai fuochi F 1 e F 2. Sull’asse maggiore vi sono i due fuochi.
~ x
~ y
O
F 2 F 1 asse maggiore
d 2 d 1
Proposizione
I rapporti: PF 1 d(P , d 1 )
e
PF 2
d(P , d 2 )
sono, al variare di P sull’ellisse Γ, costanti e uguali a una costante e = ca , detta eccentricità dell’ellisse. Inoltre si prova che e < 1 , cioè:
PF 1 d(P , d 1 )
PF 2
d(P , d 2 )
= e =
c a
< 1 ∀P ∈ Γ.
Studio dell’iperbole in forma canonica
L’equazione canonica dell’iperbole è del tipo:
x 2 a^2
y 2 b^2
Essa rientra tra le coniche del tipo I α x 2 + β y 2 = γ , con αγ = (^) a^12 e β γ =^ −^
1 b^2.
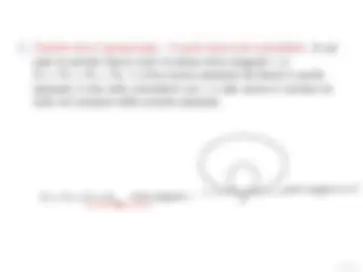
- L’origine O = ( 0 , 0 ) è il centro di simmetria, perché se ( α, β ) ∈ Γ =⇒ (− α, − β ) ∈ Γ.
- L’asse ~ x è asse di simmetria, perché se ( α, β ) ∈ Γ =⇒ ( α, − β ) ∈ Γ.
- L’asse ~ y è asse di simmetria, perché se ( α, β ) ∈ Γ =⇒ (− α, β ) ∈ Γ.
L’asse ~ x è l’unico dei due assi di simmetria che incontra l’iperbole in due punti reali, V 1 = (a , 0 ) e V 2 = (−a , 0 ). Sono i due vertici dell’iperbole e l’asse ~ x è detto asse trasverso.
~x
~y
O
asse trasverso V 2 V 1