


1
CS 430
Computer Graphics
3D Transformations
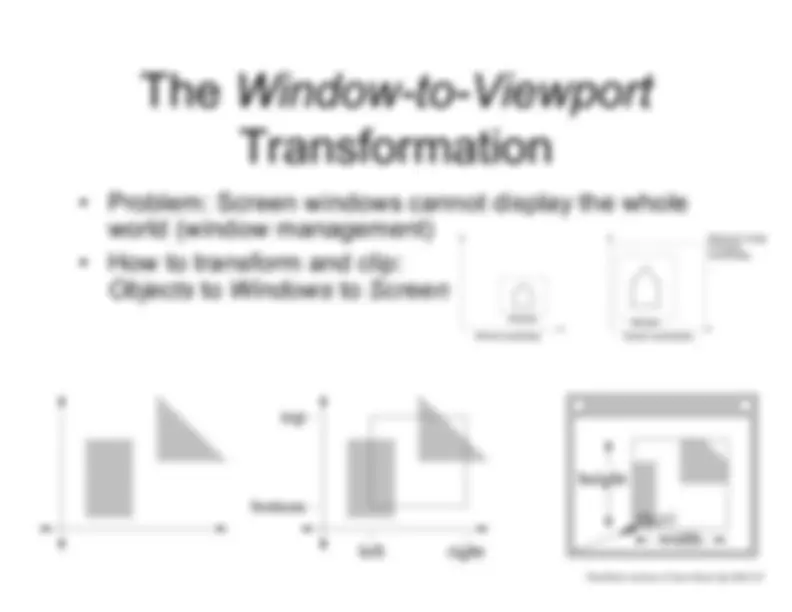
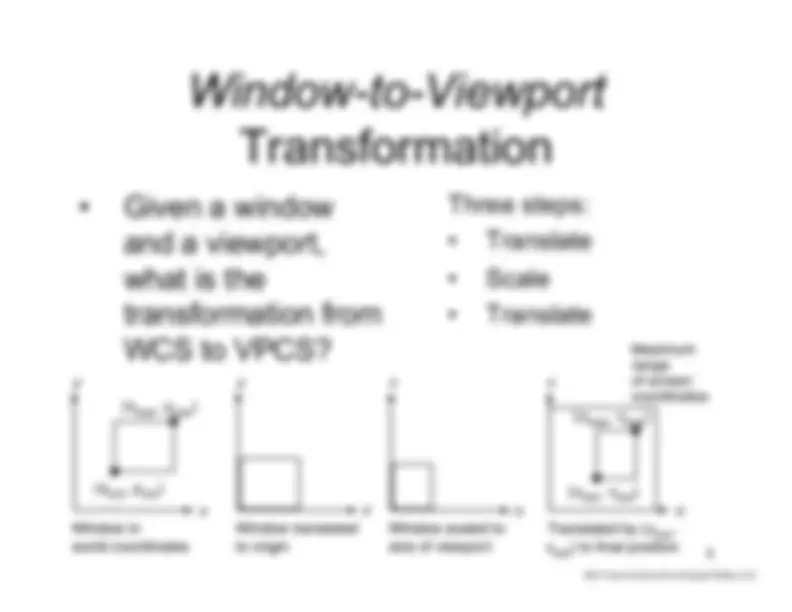
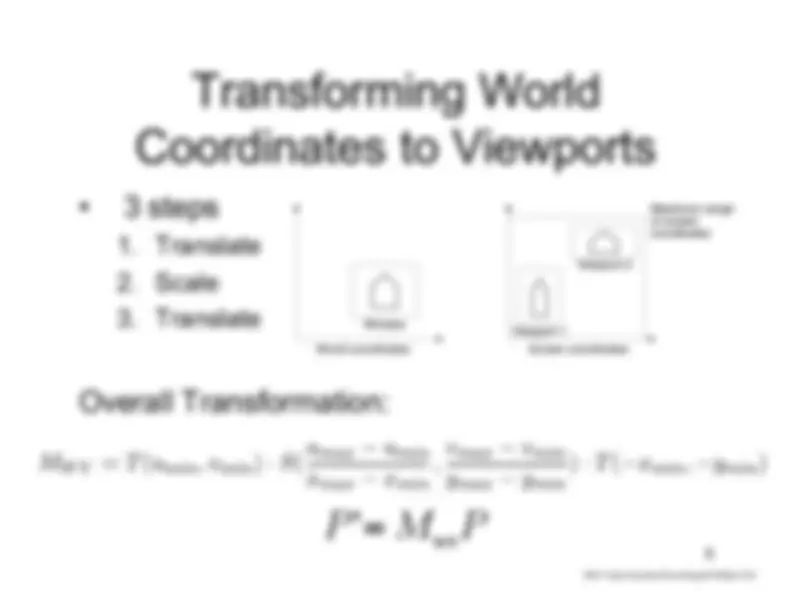
World Window to Viewport Transformation
Week 2, Lecture 3
David Breen, William Regli and Maxim Peysakhov
Department of Computer Science
Drexel University








Study with the several resources on Docsity

Earn points by helping other students or get them with a premium plan

Prepare for your exams
Study with the several resources on Docsity
Earn points to download
Earn points by helping other students or get them with a premium plan
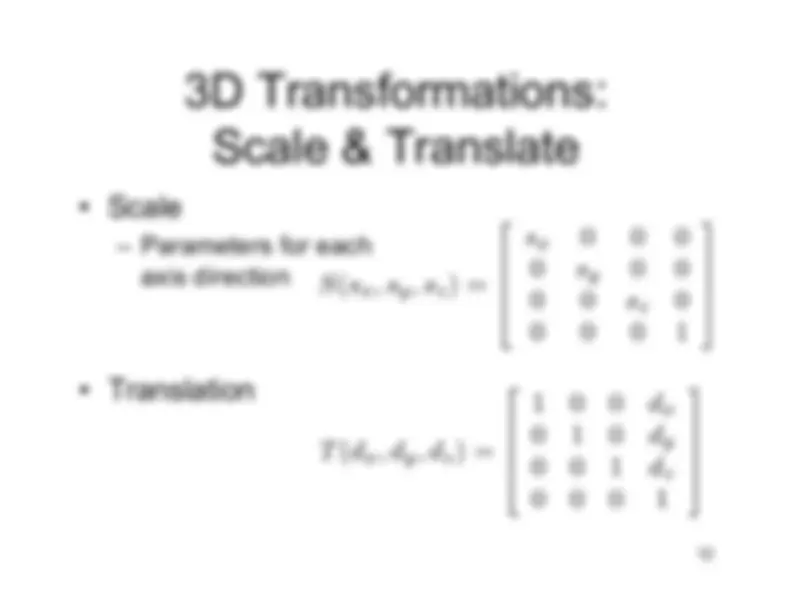
3D transformations. • Coordinate system transformation ... 3D Homogenous Coordinates. • Homogenous coordinates for 2D space requires 3D vectors & matrices.
Typology: Schemes and Mind Maps
1 / 35

This page cannot be seen from the preview
Don't miss anything!
Week 2, Lecture 3 David Breen, William Regli and Maxim Peysakhov Department of Computer Science Drexel University
4
5
wv
10
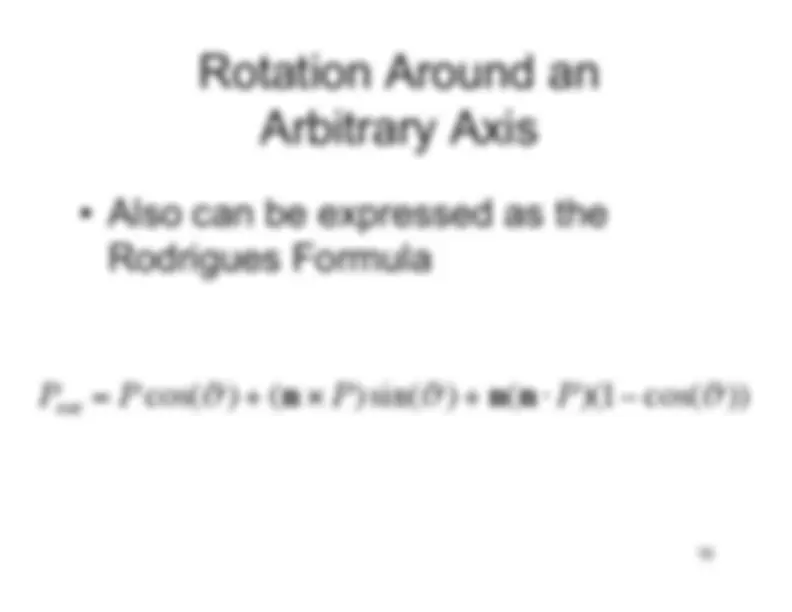
rot = P cos( ϑ ) + ( n × P )sin( ϑ ) + n ( n ⋅ P )( 1 − cos( ϑ ))
€ p = ( 0 , x )
slerp – Spherical linear interpolation Need to take equals steps on the sphere A & B are quaternions