


Control Flow 1:
Control Flow Graph, Dominators
EECS 483 – Lecture 19
University of Michigan
Monday, November 13, 2006
















Study with the several resources on Docsity

Earn points by helping other students or get them with a premium plan

Prepare for your exams
Study with the several resources on Docsity
Earn points to download
Earn points by helping other students or get them with a premium plan
Material Type: Exam; Class: Compiler Constr; Subject: Electrical Engineering And Computer Science; University: University of Michigan - Ann Arbor; Term: Fall 2006;
Typology: Exams
1 / 30

This page cannot be seen from the preview
Don't miss anything!
15014013012011010090 80 70 60 50 40 30 20 10 0
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
Exam score Average: 119
Stdev: 17.
High: 147
short a[100];
size = 200, halfword aligned, maps to addrs 1000 - 1199
char b;
size = 1, byte aligned, maps to addr 1200
int c;
size = 4, word aligned, maps to addrs 1204-
double d;
size = 8, double aligned, maps to addrs, 1208-
short e;
size = 2, halfword aligned, maps to addrs, 1216-
struct {
max field = int, thus must be word aligned, start at addr 1220
char f;
size = 1, byte aligned, maps to addr, 1220
int g[1];
size = 4, word aligned, maps to addrs, 1224-
char h[2];
size = 2, byte aligned, maps to addrs 1228-
} i;
overall size of struct must be multiple of 4, thus pad out to
How many bytes of memory does the following sequence of C declarations require (int = 4 bytes)? Assume we start at a word aligned address, say 1000
Total size = 232 bytes
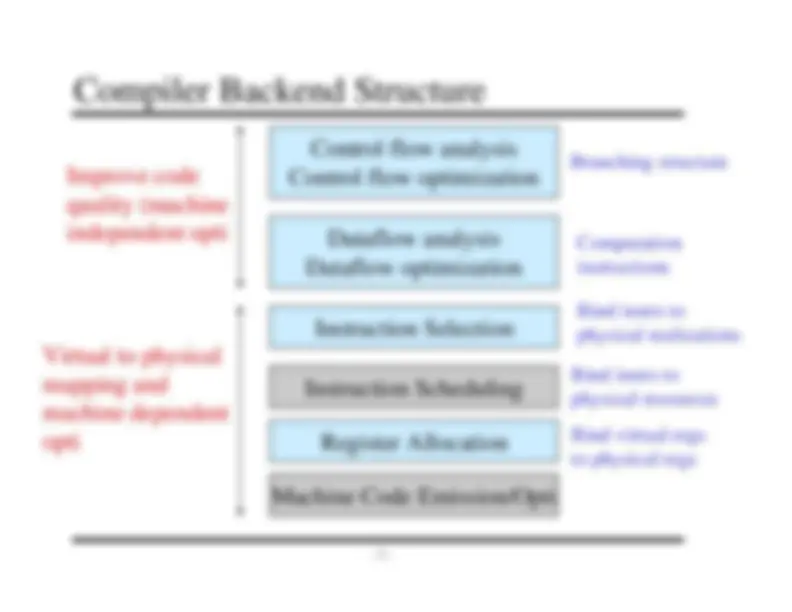
y Machine independent opti y Machine dependent opti y Analyze program, understand its behavior, thentransform it to a more efficient form
y Deal with limitations of processor y Virtual to physical binding (resource binding)
rd
Control flow analysis Control flow optimization
Dataflow analysis Dataflow optimization Instruction Scheduling Instruction Selection^ Register Allocation
Machine Code Emission/Opti
Improve code quality (machine independent opti Virtual to physical mapping and machine dependent opti
Branching structure^ Computation^ instructions^ Bind instrs to^ physical realizations^ Bind instrs to^ physical resources^ Bind virtual regs^ to physical regs
» Direction of a particular instance of a branch » Predict, speculate, squash, etc.
» Not executing the program » Input not known, so what could happen, worst case
starts a BB
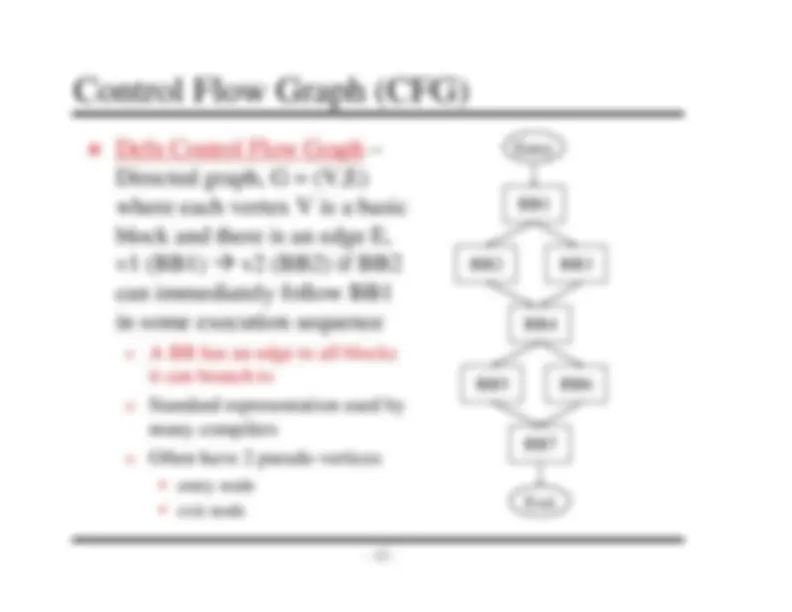
Defn Control Flow Graph
Directed graph, G = (V,E)where each vertex V is a basicblock and there is an edge E,v1 (BB1)
v2 (BB2) if BB
can immediately follow BB1in some execution sequence^ »
A BB has an edge to all blocksit can branch to »^
Standard representation used bymany compilers »^
Often have 2 pseudo vertices^ y
entry node y^
exit node
BB
BB
BB
BB
BB
BB
Entry^ BB7^ Exit
x = x + 1; y = y + 1; } else {
x = x – 1; y = y – 1; } z = x + y
x = z – 2;y = 2 * z;if (c) B2 else B
x = x + 1;y = y + 1;goto B
z = z + y
x = x – 1;y = y – 1;
then(fallthrough)
else(taken)
Profiling
on 1 or more sample inputs,record some behavior^ »
Control flow profiling**^ y
edge profile y^
block profile
»^
Path profiling
Annotate control flow profileonto a CFG
weighted CFG
Optimize more effectively withprofile info!!^ »
Optimize for the common case »^
Make educated guess
BB
BB
BB
BB
BB
BB
Entry^ BB7^ Exit
20
10
10
10
10
15
5
15
5 20
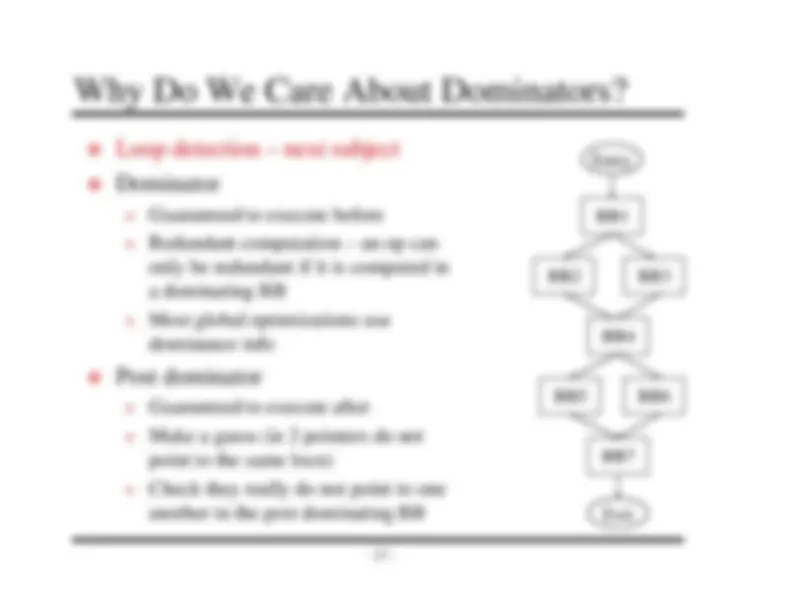
Not executing the code
» Properties that exist regardless of the run-time branch
directions » Use CFG » Optimize efficiency of control flow structure
BB
BB
BB
BB
BB
BB
Entry^ BB7^ Exit
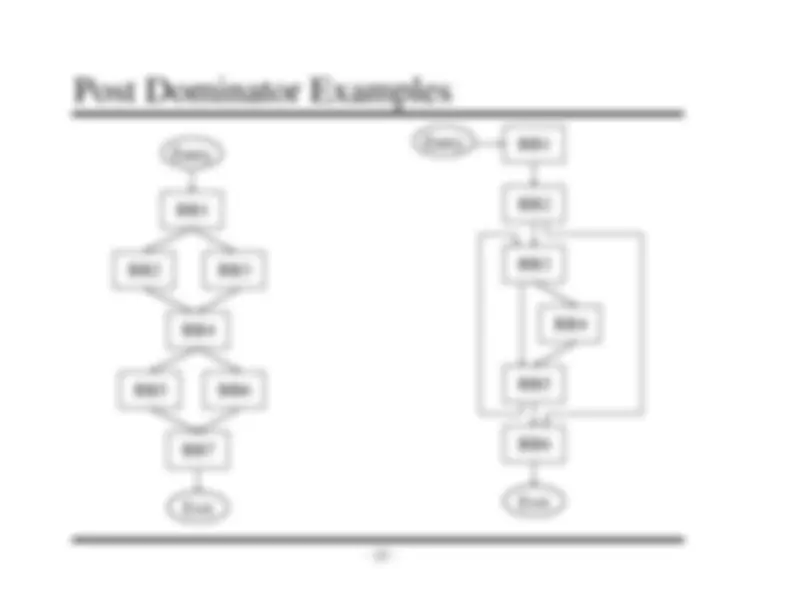
BB2 BB
BB
BB
Entry
BB1 BB6^ Exit
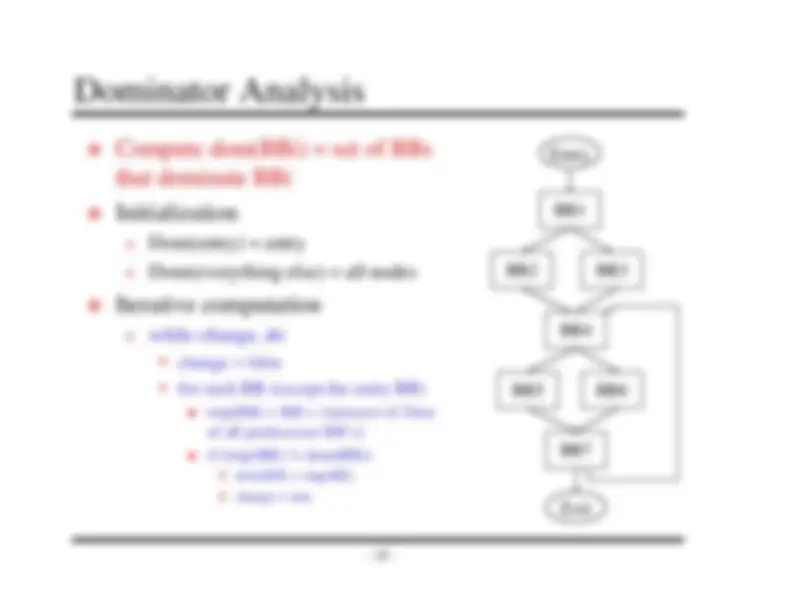
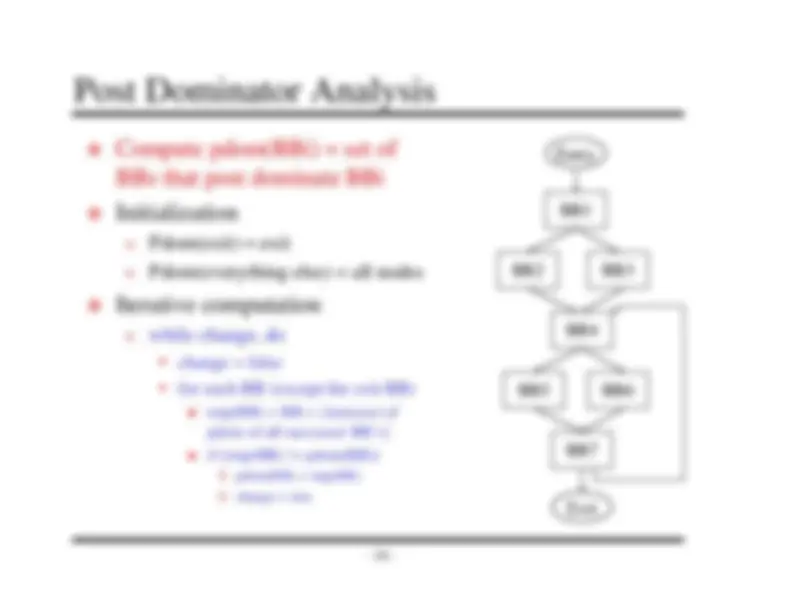
Compute dom(BBi) = set of BBsthat dominate BBi
Initialization^ »
Dom(entry) = entry »^
Dom(everything else) = all nodes
Iterative computation^ »
while change, do^ y
change = false y^
for each BB (except the entry BB)^
tmp(BB) = BB + {intersect of Domof all predecessor BB’s} if (tmp(BB) != dom(BB))
È
dom(BB) = tmp(BB) È
change = true
BB
BB
BB
BB
BB
BB
Entry^ BB7^ Exit