



Dynamic Behavior of Closed-
Loop Control Systems
Chapter 11
4-20 mA
Docsity.com






















Study with the several resources on Docsity

Earn points by helping other students or get them with a premium plan

Prepare for your exams
Study with the several resources on Docsity
Earn points to download
Earn points by helping other students or get them with a premium plan
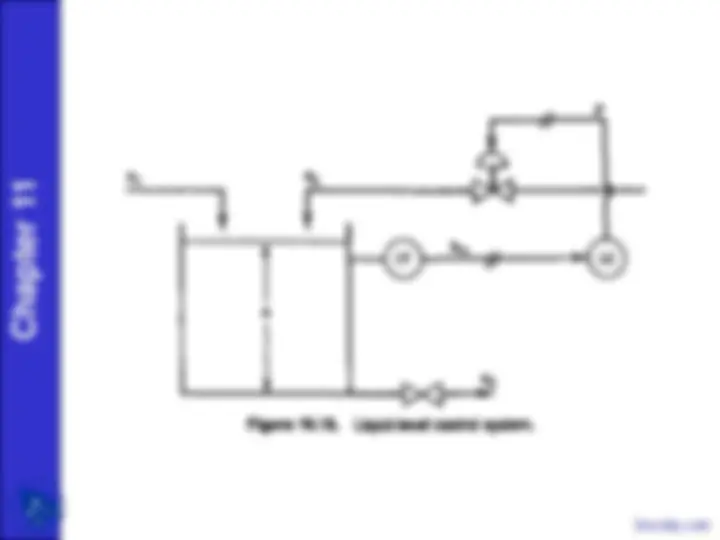
This lecture is from Process Control course. Some key points for this lecture are: Dynamic Behavior One, Loop Control Systems, Approximate Dynamic, Model, Blending System, Stirred Tank, Feedback Control Loop, Assumed To Be Constant, System, Denotes
Typology: Slides
1 / 34

This page cannot be seen from the preview
Don't miss anything!
4-20 mA
or after taking Laplace transforms,
The symbol denotes the internal set-point composition expressed as an equivalent electrical current signal. This signal is used internally by the controller. is related to the actual composition set point by the composition sensor- transmitter gain Km:
Thus
sp m (11-8) sp
X s K X s
We assume that the dynamic behavior of the composition sensor- transmitter can be approximated by a first-order transfer function:
τ 1
m (^) m m
X s (^) K X s s
Suppose that an electronic proportional plus integral controller is used. From Chapter 8, the controller transfer function is
c τI
P s K E s s
where and E(s) are the Laplace transforms of the controller output and the error signal e(t). Note that and e are electrical signals that have units of mA, while Kc is dimensionless. The error signal is expressed as
1. Summer 2. Comparator 3. Block - Blocks in Series
are equivalent to...
1 2
sp
d p
d v p c m
d v p c
m s
m
d c v m
p
p
1 where , : any two variables in block diagram : product of the transfer functions in the path from to : product of the transfer functions in the feedback loop.
f e
f
e
Y X
X Y
X Y
π π
π
π
=
open-loop transfer function
f d
e c v p m OL
X D
Y Y
G
G G G G G
π
π
=
=
=
= =
=
I O