



Interest Points and
Instance Recognition
Computer Vision
Docsity.com






























Study with the several resources on Docsity

Earn points by helping other students or get them with a premium plan

Prepare for your exams
Study with the several resources on Docsity
Earn points to download
Earn points by helping other students or get them with a premium plan
These are the Lecture Slides of Introduction to Computer Version which includes Machine Learning, Framework, Prediction Function, Feature Representation, Image, Desired Output, Prediction Function, Prediction Error, Predicted Value etc. Key important points are: Interest Points, Instance Recognition, Detecting, Corner Like Points, Image, Local Invariant Features, Detection of Interest Points, Harris Corner Detection, Scale Invariant Blob Detection, Pipeline
Typology: Lecture notes
1 / 59

This page cannot be seen from the preview
Don't miss anything!
Docsity.com
Last time
Docsity.com
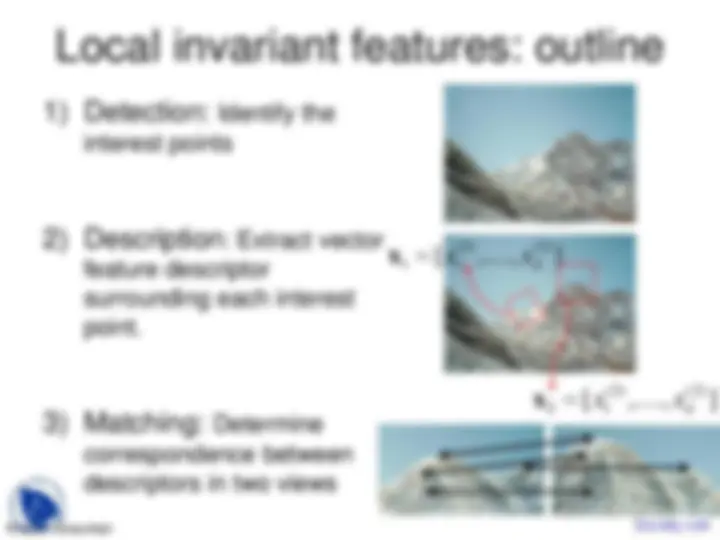
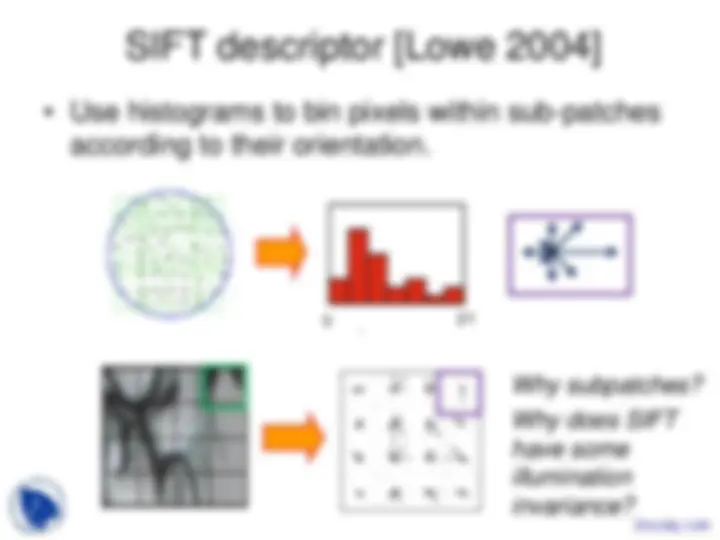
Local invariant features: outline
interest points
feature descriptor surrounding each interest point.
correspondence between descriptors in two views
x 2 [ x 1 (^2 ),, xd (^2 )]
Kristen Grauman Docsity.com
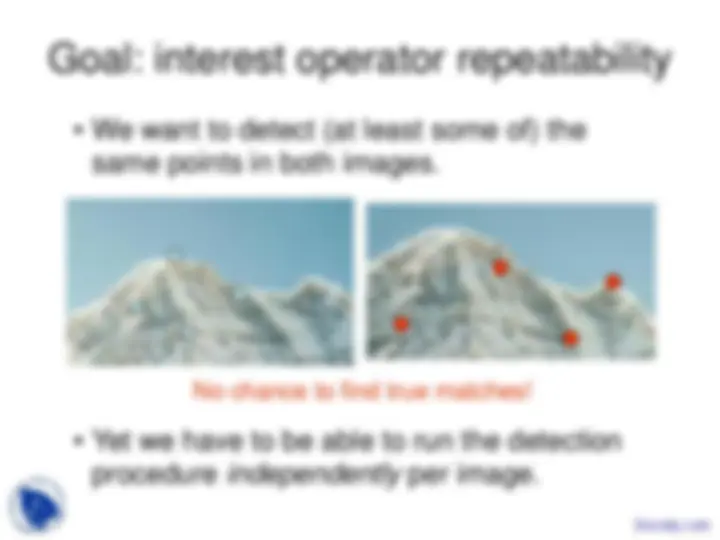
No chance to find true matches!
Docsity.com
Local features: main components
interest points
feature descriptor surrounding each interest point.
correspondence between descriptors in two views Docsity.com
Since M is symmetric, we have M X XT 2
1 0
0
Mxi ixi
Recall: Corners as distinctive interest points
Docsity.com
Slide: Derek Hoiem
Harris Detector [Harris88]
( ) ( ) ( , ) ( ) ( ) ( ) 2
2 x y D y D I D I x D x y D I I I g I I I
12
Ix Iy
Ix^2 Iy^2 IxIy
g(Ix^2 ) g(Iy^2 ) g(IxIy)
( 2 ) (^2 ) [ ( )]^2 [ (^2 ) (^2 )]^2 g Ix g Iy g IxIy g Ix g Iy
har det[ ( I , D )] [trace( ( I , D ))^2 ]
1 2 1 2
det trace
M M
Docsity.com
Properties of the Harris corner detector
M X XT 2
1 0
Yes 0
Docsity.com
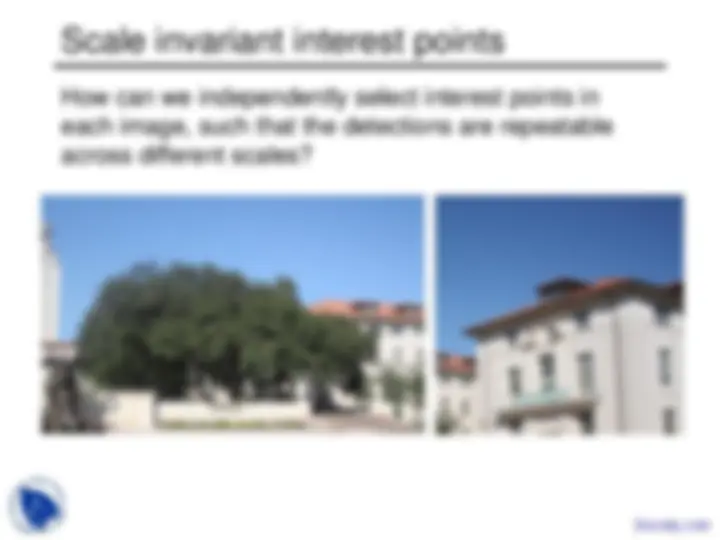
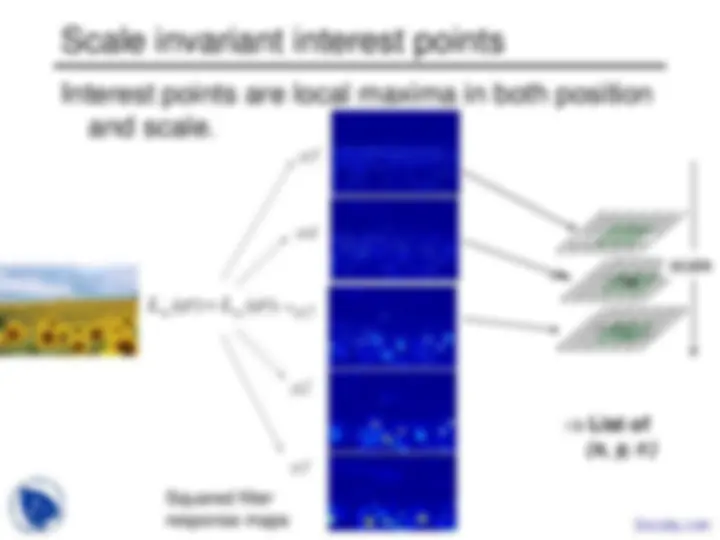
Scale invariant interest points
How can we independently select interest points in each image, such that the detections are repeatable across different scales?
Docsity.com
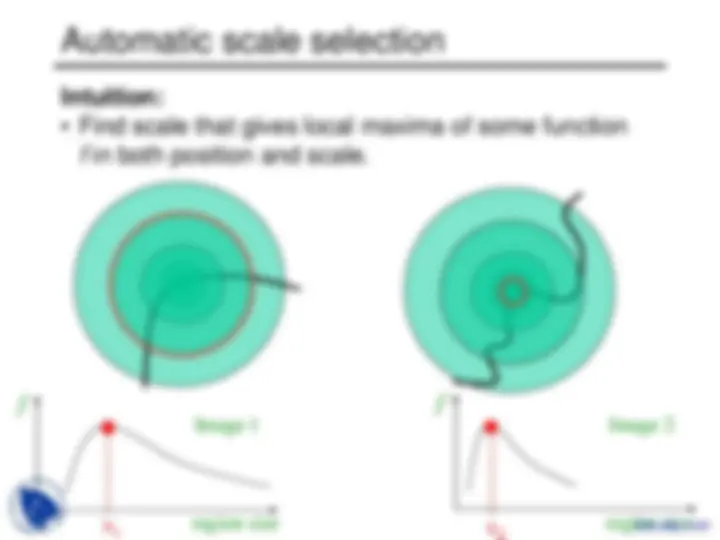
Automatic scale selection
Intuition:
f
region size
Image 1
f
region size
Image 2
s 1 s 2 Docsity.com
Blob detection in 2D
2
2
2
2 2
y
g
x
g g
Docsity.com
Blob detection in 2D: scale selection
Laplacian-of-Gaussian = ―blob‖ detector 2
2 2
2 2
Bastian Leibe img1 img2 (^) img3 Docsity.com
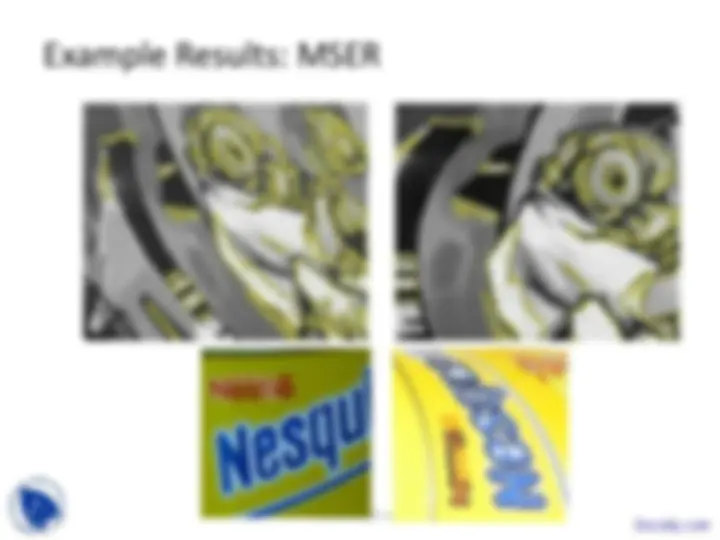
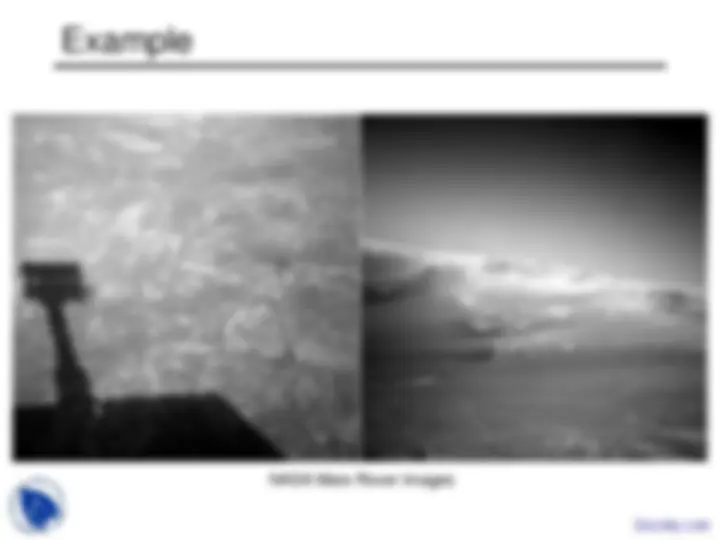
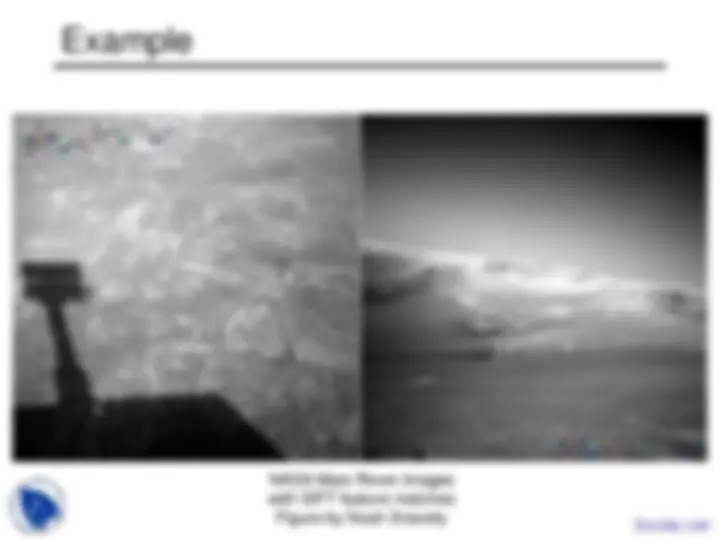
Example
Original image at ¾ the size
Kristen Grauman Docsity.com
Original image at ¾ the size
Kristen Grauman Docsity.com