Download Introduction And Components-Control Systems-Project Report and more Study Guides, Projects, Research Control Systems in PDF only on Docsity!
CHAPTER 1
INTRODUCTION & COMPONENTS
INTRODUCTION
This project is designed so that students can understand the technology used in the now a day’s driver less metro train which is used in most of the developed countries like Germany, France, and Japan etc. These trains are equipped with the CPU, which control the train. The train is programmed for the specific path. Every station on the path is defined; stoppage timing of the train and distance between the two stations is predefined. This is very wonderful project to control the working of the train without driver. These train are equipped with the CPU which control the train.
- 8051 Microcontroller
- ULN 2003
- Stepper motor
- LCD
In this project we try to give the same prototype for this type of trains. We are using ATMEL microcontroller 8051 to control all the function as CPU. Microcontroller controls the rotation of motor. First the motor is controlled and name of each station is displayed over LCD and accordingly the different delay for each station is provided. So this project works for metro train without driver. The motion of the train is controlled by the Stepper Motor, for displaying message in the train we are using Intelligent LCD Display of two lines. The train is designed for three stations, named as New Delhi, Noida, and Greater Noida. The Stoppage time is of 3 Sec and time between two consecutive stations is 6 sec. There is a LCD display for showing various messages in the train for passengers. There are indicators, which are used to show the train direction i.e. UP path and down path. Before stopping at station the train blows the buzzer. It also includes an emergency brake system due to which the train stops as soon as the brakes are applied and resumes journey when the emergency situation is over.
WHAT IS EMBEDDED TECHNOLOGY
Embedded technology is software or hardware that is hidden embedded in a large device or system. It typically refers to a fixed function device, as compared with a PC, which runs general purpose application. Embedded technology is nothing new. It all around us and has been for years. An early example of embedded technology is the engine control unit in a car, which measures what setting to give the engine. Your coffee maker has embedded technology in the form of a microcontroller, which is what tells it to make the coffee at 6 a.m. the vending machine has it too. Overall, billions of devices woven into everyday life use embedded technology. In the past embedded technology existed in standalone device vending machines and copiers that did their jobs with little regard for what went on around them,. But as technology has learned to connect device to the internet and to each other, embedded technology potential has grown. Suddenly it is and what actions those connections let them perform. Cell phone companies figured that out a long time ago, which is why cell phones are cheap and the service, plans are expensive. It is not the phone itself that matters, but the connectivity to a vast network of other phones, other people and the internet. Until you download software that lets you find a local restaurant or mange your finances. Let say you make freezers the big, expensive kind that grocery stores buy. You sell ne and you are done with that customer. When it brakes the customer calls a service person, who probably comes from somewhere other than your company. But let us say that freezer knows that it is about to go on the fritz. Let say three refrigerator alerts the customer before it breaks. Better yet, let us say the freezer alerts the manufacturer and you are able to send a service person to do preventative work and save a lot of haagen- dazs from melting. Embedded technology allows all of that to happen. You, the freezer company have transformed yourself from a product company to product and services company. The possibilities go beyond that programming device to communicate with businesses can eliminate the need for costly call centers. Copy machines that can order their own replacement cartridges will save businesses time and money. Remember, the fact the technology is embedded is not what important, and neither is the device.
COMPONENTS
LIST OF COMPONENTS USED
Table No. 1.1 List of components
- 1 IC 8051 MC Sr. no Equipment Quantity
- 2 IC ULN
- 3 Transformer
- 4 Voltage Regulator
- 5 2 line LCD display
- 6 Stepper Motor
- 7 Crystal Oscillator
- 8 Switch
- 9 LED
- 10 Resistors(220Ω,4.7kΩ,10kΩ)
- 11 Capacitors(33pf,ceramic disk)
- 12 Diode
- 13 Buzzer
COMPONENT DESCRIPTION
1) MICRO-CONTROLLER 8051
DESCRIPTION
The IC 8051 is a low-power; high-performance CMOS 8-bit microcomputer with 4K bytes of Flash programmable and erasable read only memory (PEROM). The device is manufactured using Atmel’s high-density nonvolatile memory technology and is compatible with the industry-standard MCS-51 instruction set and pin out. The on- chip Flash allows the program memory to be reprogrammed in-system or by a conventional nonvolatile memory programmer. By combining a versatile 8-bit CPU with Flash on a monolithic chip, the Atmel IC 8051 is a powerful microcomputer which provides a highly-flexible and cost-effective solution to many embedded control applications. The IC 8051 provides the following standard features: 4K bytes of Flash, 128 bytes of RAM, 32 I/O lines, two 16-bit timer/counters, a five vector two-level interrupt architecture, full duplex serial port, on-chip oscillator and clock circuitry. In addition, the IC 8051 is designed with static logic for operation down to zero frequency and supports two software selectable power saving modes. The Idle Mode stops the CPU while allowing the RAM, timer/counters, serial port and interrupt system to continue functioning.
Figure No. 1.1: Pin Diagram of 8051
Fig No. 1.2: Reset
HIGH LEVEL LANGUAGE
A high level language like C may be used to write programs for processors. Software called compiler converts this high level language program down to machine code. Ease of programming and portability.
PIN DESCRIPTION
VCC (Pin 40) Provides voltage to the chip. +5V
GND (Pin 20) Ground
XTAL1 (Pin 19) and XTAL2 (Pin 18) Crystal Oscillator connected to pins 18, 19.Two capacitors of 30pF value. Time for one machine cycle:11.0592/12=1.085 μ secs
RST (Pin 9) RESET pin
- Active high. On applying a high pulse to this pin, microcontroller will reset and terminate all activities.
- INPUT pin
- Minimum 2 machine cycles required to make RESET
- Value of registers after RESET
External Access: EA 31
- Connected to VCC for on chip ROM
- Connected to Ground for external ROM containing the code Input Pin
Program Store Enable: PSEN 29
- Output Pin
- In case of external ROM with code it is connected to the OE pin of the ROM
Address Latch Enable: ALE 30
- Output Pin. Active high
- In case of external ROM ,ALE is used to de multiplex (PORT 0) the address and data bus by connecting to the G pin of 74LS373 chip
I/O Port Pins and their Functions:
- Four ports P0,P1,P2,P3 with 8 pins each, making a total of 32 input/output pins
- On RESET all ports are configured as output. They need to be programmed to make them function as inputs PORT 0
- Pins 32-
- Can be used as both Input or Output
- External pull up resistors of 10K need to be connected
- Dual role: 8051 multiplexes address and data through port 0 to save pins .AD0-AD
- ALE is used to de multiplex data and address bus
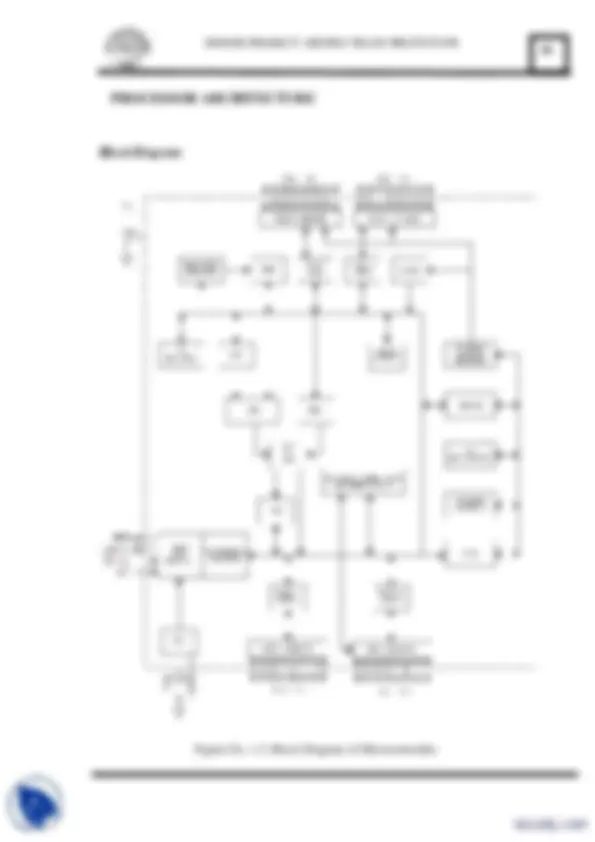
PROCESSOR ARCHITECTURE
Figure No. 1.3: Block Diagram of Microcontroller
ALU
The Arithmetic Logic Unit (ALU) performs the internal arithmetic manipulation of data line processor. The instructions read and executed by the processor decide the operations performed by the ALU and also control the flow of data between registers and ALU. Operations performed by the ALU are Addition , Subtraction , Not , AND , NAND , OR , NOR , XOR , Shift Left/Right , Rotate Left/right , Compare etc. Some ALU supports Multiplication and Division. Operands are generally transferred from two registers or from one register and memory location to ALU data inputs. The result of the operation is the placed back into a given destination register or memory location from ALU output.
REGISTERS
Registers are the internal storage for the processor. The number of registers varies significantly between processor architectures.
- WORKING REGISTERS Temporary storage during ALU Operations and data transfers.
- INDEX REGISTERS Points to memory addresses.
- STATUS REGISTERS Stores the current status of various flags denoting conditions resulting from various operations.
- CONTROL REGISTERS Contains configuration bits that affect processor operation and the operating modes of various internal subsystems.
Processor buses are of three types:
- Data bus
- Address bus
- Control bus
CONTROLLER LOGIC
Processor brain decodes instructions and generate control signal for various sub units. It has full control over the clock distribution unit of processor.
I/O Peripherals
The I/O devices are used by the processor to communicate with the external world
- Parallel Ports.
- Serial Ports.
- ADC/DAC.
2) ULN 2003
Figure No. 1.4: ULN 2003
FEATURES
- Output current 500mA per driver (600mA peak)
- Output voltage 50V
- Integrated suppression diodes for inductive loads
- Outputs can be paralleled for higher current
- TTL/CMOS/PMOS/DTL Compatible inputs
- Inputs pinned opposite outputs to simplify Layout
DESCRIPTION
The ULN2001, ULN2002, ULN2003 and ULN2004 are high voltage, high current Darlington Arrays each contain seven open collector Darlington pairs with common emitters. Each Channel rated at 500mA and can withstand peak currents of 600mA. Suppression diodes are Included for inductive load driving and the inputs are pinned opposite the outputs to simplify board
MAXIMUM RATING
Table No. 1.2: Maximum Rating of ULN
safe-area compensation. With adequate heat sinking they can deliver output current in excess of 1.0 A. Although designed primarily as a fixed voltage regulator, these devices can be used with external components to obtain adjustable voltage and current.
FEATURES
- Output current in Excess of 1.0 A
- No external component required
- Internal thermal overload protection
- Internal short circuit current limiting
- Output transistor safe-area compensation
- Output voltage offered in 2% and 4% tolerance
- Available I n surface mount D2PAK and standard 3-lead transistor packages
- Previous commercial temperature range has been extended to a junction temperature range of -40 degree C to +125 degree C.
4) STEPPER MOTOR
Figure No. 1.6: 12-Volt 75 Ohm Unipolar Stepper Motor
GENERAL INFORMATION
A stepper motor system is an electro-mechanical rotary actuator that converts electrical pulses into unique shaft rotations. This rotation is directly related to the number of pulses.
Motion Control, in electronic terms, means to accurately control the movement of an object based on speed, distance, load, inertia or a combination of all these factors. There are numerous types of motion control systems, including; Stepper Motor, Linear Step Motor, DC Brush, Brushless, Servo, Brushless Servo and more. Stepper motors are ideally suited for precision control. This motor can be operated in forward/reverse with controllable speed from a BASIC Stamp or any other microcontroller through a transistor driver circuit. Some of the applications for this motor include educational experimentation, robotics and precision mechanical control the #27964 is a Unipolar (4 phase) 12 VDC, 150 mA motor that takes 3.6 degrees per step.
TECHNICAL SPECIFICATIONS
· Phase resistance (Ohms): 75 · Current (mA): 150 · Phase Inductance (mH): 39 · Detent torque (g-cm): 80 · Holding Torque (g-cm): 600 · Mounting hole space diagonal (in.): 1. · Mounting hole (in.) 0. · Shaft diameter (in.): 0. · Shaft length (in.): 0. · Motor Diameter (in.): 1. ·Motor height (in.): 1. · Weight: 0.55 lbs.
CIRCUIT DESCRIPTION
Above is the quite simple schematic. The LCD panel's Enable and Register Select is connected to the Control Port. The Control Port is an open collector / open drain output. While most Parallel Ports have internal pull-up resistors, there is a few which don't. Therefore by incorporating the two 10K external pull up resistors, the circuit is more portable for a wider range of computers, some of which may have no internal pull up resistors.
We make no effort to place the Data bus into reverse direction. Therefore we hard wire the R/W line of the LCD panel, into write mode. This will cause no bus conflicts on the data lines. As a result we cannot read back the LCD's internal Busy Flag which tells us if the LCD has accepted and finished processing the last instruction. This problem is overcome by inserting known delays into our program.
The 10k Potentiometer controls the contrast of the LCD panel. Nothing fancy here. As with all the examples, I've left the power supply out. You can use a bench power supply set to 5v or use an onboard +5 regulator. Remember a few de-coupling capacitors, especially if you have trouble with the circuit working properly.
The 2 line x 16 character LCD modules are available from a wide range of manufacturers and should all be compatible with the HD44780. The diagram to the right shows the pin numbers for these devices. When viewed from the front, the left pin is pin 16 and the right pin is pin 1.
Figure No. 1.9: LCD Display
6) POWER SUPPLY
Figure No. 1.10: Power Supply
BRIDGE RECTIFIER
Bridge rectifier circuit consists of four diodes arranged in the form of a bridge as shown in figure.
Figure No. 1.11: Bridge Rectifier
AC Suppl
D
D
D
D
1
B (^2)
A
(^3 )
7805
1000 μF (^) + +
AC Supply (^) + Load
D
D
D
D
1
B (^2)
A
(^3 )