Download Platooning.-Control Systems-Project Report and more Study Guides, Projects, Research Control Systems in PDF only on Docsity!
Introduction
Advantages of Auto Platooning: ¾
Minimizes the single greatestcause of traffic accidents andrelated congestion: driver error.
Double the existing freewaycapacity and dramatically reducecongestion-related pollution andfuel consumption
Intelligent vehicles and highway systems have beenstudied to make cars function more effectively.
Objective
Leading Car:
runs at the specified speed
Following Car:
- Detect leading car;2. Leading car not found, runs at specified
constant speed;
- Leading car found, follows it with desired
distance separating them;
Configuration of SystemSoftware: ¾
Priority based control algorithm
PID controller used to keep the desireddistance between two vehicles
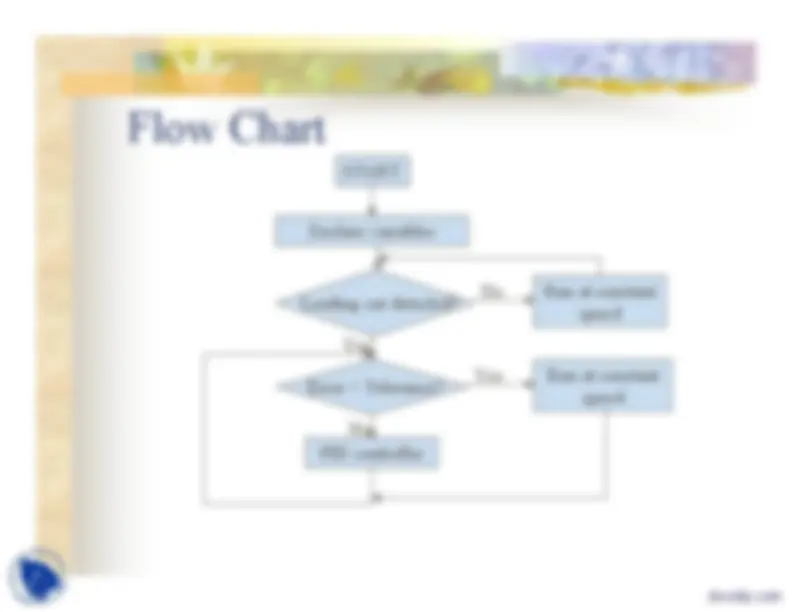
Flow Chart
No
START
Declare variables Leading car detected?
Run at constant
speed
PID controller
Error < Tolerance?
No
Run at constant
speed
Yes
Yes
Demo Scenario ¾
The leading car will run at a constant speed
The following car will run at a fast speedand get closer and closer to the leading one
When leading car is detected, the followingcar will slow down and follow it with aconstant distance between them
Any questions before the demo?