Download Lab Report Steady State Error AUST and more Lecture notes Control Systems in PDF only on Docsity!
Objective: To determine steady state error of different types of system. Theory: The steady state error is defined as:
Type 0 system, input polynomial factor 0:
Type 0 system, input polynomial factor 1:
Type 0 system, input polynomial factor 2:
Type 1 system, input polynomial factor 0:
Type 1 system, input polynomial factor 1:
Type 1 system, input polynomial factor 2:
Steady State Errors for Polynomial Inputs System Type Polynomial Degree
Step Input 0 0 Ramp Input 0 Parabolic Input
Report 1: clear all; close all; clc; num1=1.5; den1=[1 3 2 0]; [num,den]=cloop(num1,den1); H=tf(num,den); t=linspace(0,60,2000)'; u=ones(length(t),1); ys=step(H,t); figure(1); subplot(2,1,1); plot(t,u,t,ys,'--'); grid eu=u-ys; eu_ss=eu(length(eu)) subplot(2,1,2) plot(t,eu); r=t; yr=lsim(H,r,t); figure(2); subplot(2,1,1); plot(t,r,t,yr,'--');
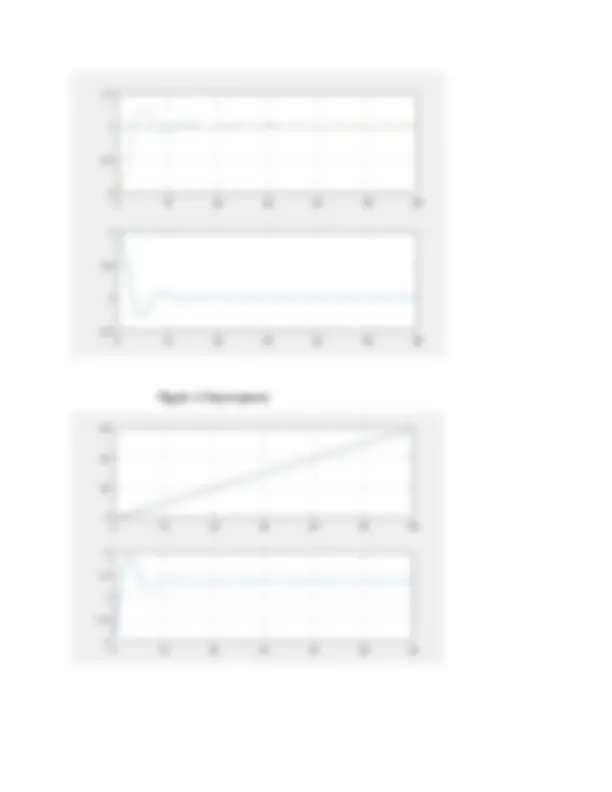
Figure-1:Step response
Figure-2:Ramp response
Figure-3:Parabolic response
Our System is Type 1 system. Step response : Ideally in case of step response the error should be zero. In figure 1 we have seen that zero error criteria is met after a certain period. Ramp response: According to theory , this type of ramp response follows 1/Kv (const) relation.For our system the value of error is =1.33. From figure-2 we get error =1.4. Parabolic response: Theoretically this error can get infinity. Our figure shows the same.
subplot(2,1,1); plot(t,r,t,yr,'--'); grid er=r-yr; er_ss=er(length(er)) subplot(2,1,2); plot(t,er); grid p=(t.*t)/2; yp=lsim(H,p,t); figure(3); subplot(2,1,1); plot(t,p,t,yp,'--'); grid ep=p-yp; ep_ss=ep(length(ep)) subplot(2,1,2); plot(t,ep); grid
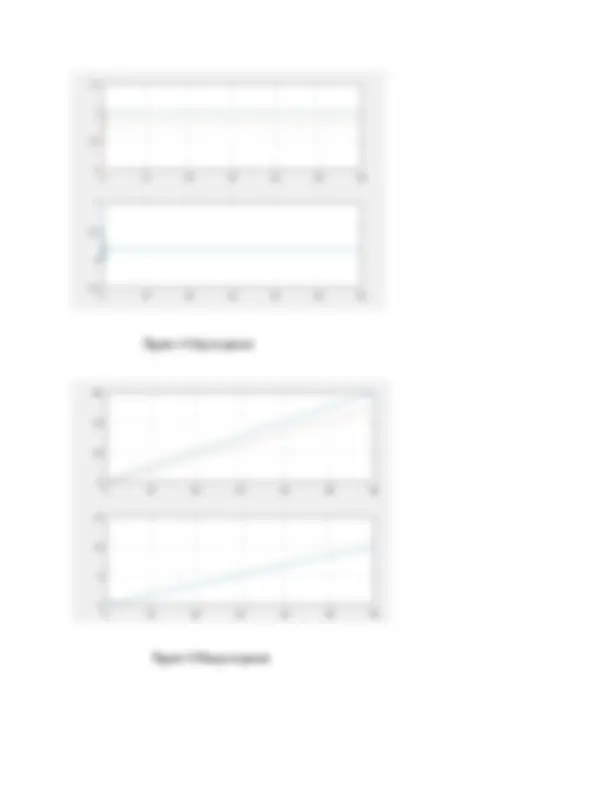
Figure-4:Step response
Figure-5:Ramp response
num1=12; den1=[1 7 12 10 0]; [num,den]=cloop(num1,den1); H=tf(num,den); t=linspace(0,60,2000)'; u=ones(length(t),1); ys=step(H,t); figure(1); subplot(2,1,1); plot(t,u,t,ys,'--'); grid eu=u-ys; eu_ss=eu(length(eu)) subplot(2,1,2) plot(t,eu); r=t; yr=lsim(H,r,t); figure(2); subplot(2,1,1); plot(t,r,t,yr,'--'); grid er=r-yr; er_ss=er(length(er)) subplot(2,1,2); plot(t,er); grid
p=(t.*t)/2; yp=lsim(H,p,t); figure(3); subplot(2,1,1); plot(t,p,t,yp,'--'); grid ep=p-yp; ep_ss=ep(length(ep)) subplot(2,1,2); plot(t,ep); grid
Figure-7:Step response
Step response : Ideally in case of step response the error should be zero. In figure 1 we have seen that zero error criteria is met after a certain period. Ramp response: According to theory , this type of ramp response follows 1/Kv (const) relation.For our system the value of error is =0.833. From figure-2 we get error =0.8376. Parabolic response: Theoretically this error can get infinity. Report 3: Effect of stability of closed loop system on the value of steady state error: When the poles of the closed-loop transfer function of a given system are located in the right-half of the S-plane (RHP), the system becomes unstable. When the poles of the system are located in the left-half plane (LHP) and the system is not improper, the system is shown to be stable. Then the system is stable if and only if every pole of every transfer function in the transfer function matrix has a negative real part and every transfer function in the transfer function matrix is not improper. Here we have seen for closed loop system the steady state error is greater for type 0 system.On the other hand smaller values for type 2 system.Our figure shows the same. Discussion: As our object was to determine steady state error of different systems, we have achieved our goal here. We have seen different type of system and obtained their error both theoretically and graphically. An interesting phenomena is that we were able to get similar error values for all the cases. There may be some difference between them but it can be ignored. Most separation between the theoretical and graphical value is.. However, Steady-state error can occur because of nonlinearities in our system. For example value was the least for type 0 system. For type 1, it is increased eventually. As to conclusion, this shows that the steady state error can be reduced by increasing the gain. However, to achieve zero steady-state error, the gain would have to approach infinity. Therefore, for a first order system, a proportional controller cannot be used to eliminate the step response steady state error.