


The Instruction Decoder
The instruction decoder, used by both the hardwired control unit and microprogrammed
control unit, is a simple 5–to–32 active high decoder with some outputs not used.


Study with the several resources on Docsity

Earn points by helping other students or get them with a premium plan

Prepare for your exams
Study with the several resources on Docsity
Earn points to download
Earn points by helping other students or get them with a premium plan
The role of the instruction decoder in the hardwired and microprogrammed control units of a computer. It discusses the signal generation trees for the common fetch sequence and the defer state, and highlights commonalities in the control signals for instructions with ir31 = 0 and ir31 = 1. Useful for students studying computer organization and digital design.
Typology: Study notes
1 / 12

This page cannot be seen from the preview
Don't miss anything!
The instruction decoder, used by both the hardwired control unit and microprogrammed control unit, is a simple 5–to–32 active high decoder with some outputs not used.
The hardwired control unit is implemented as a number of signal generation trees. The input to each tree is as follows:
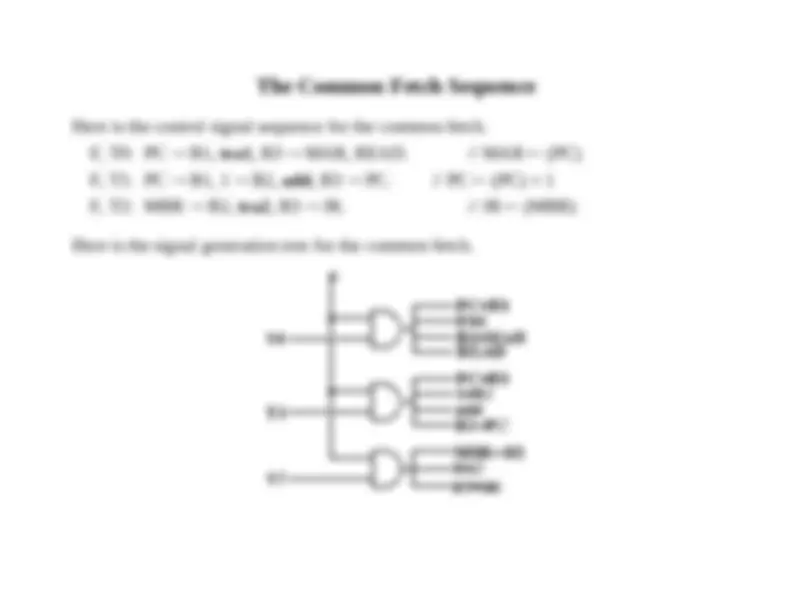
Here is the control signal sequence for the Defer State. D, T0: READ. // Address is already in the MAR. D, T1: WAIT. // Cannot access the MBR just now. D, T2: MBR B2, tra2 , B3 MAR. // MAR (PC)MBR) D, T3: WAIT. // Effective Address is now in the MAR. Here is the signal generation tree.
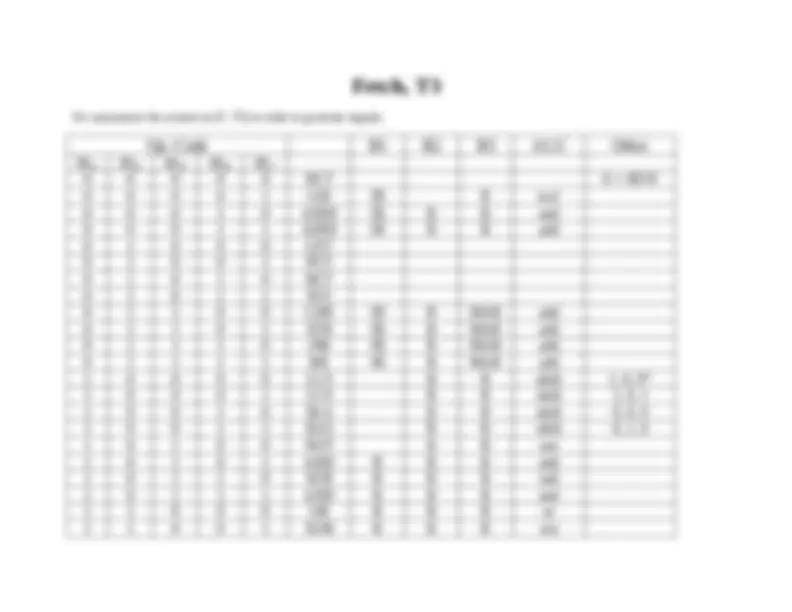
We summarize the actions in (PC)F, T3) in order to generate signals. Op–Code B1 B2 B3 ALU Other IR 31 IR 30 IR 29 IR 28 IR 27 0 0 0 0 0 HLT 0 RUN 0 0 0 0 1 LDI IR R tra 0 0 0 1 0 ANDI IR R R and 0 0 0 1 1 ADDI IR R R add 0 1 0 0 0 GET 0 1 0 0 1 PUT 0 1 0 1 0 RET 0 1 0 1 1 RTI 0 1 1 0 0 LDR IR R MAR add 0 1 1 0 1 STR IR R MAR add 0 1 1 1 0 JSR IR R MAR add 0 1 1 1 1 BR IR R MAR add 1 0 0 0 0 LLS R R shift 1, 0, 0* 1 0 0 0 1 LCS R R shift 1, 0, 1 1 0 0 1 0 RLS R R shift 0, 0, 0 1 0 0 1 1 RAS R R shift 0, 1, 0 1 0 1 0 0 NOT R R not 1 0 1 0 1 ADD R R R add 1 0 1 1 0 SUB R R R sub 1 0 1 1 1 AND R R R and 1 1 0 0 0 OR R R R or 1 1 0 0 1 XOR R R R xor
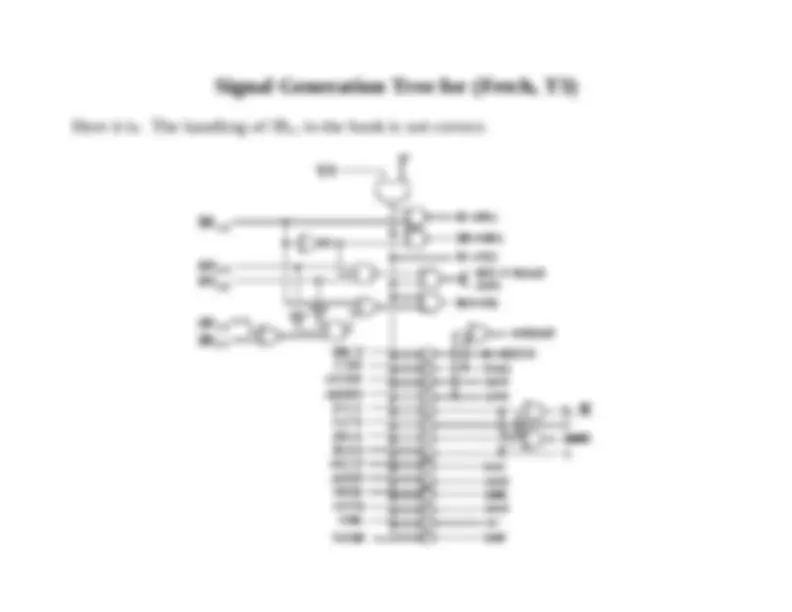
Here we note the commonalities for instructions with IR 31 = 0. All instructions that use bus B1 issue the control signal IR B1. We simplify the signal generation tree by causing all instructions with IR 31 = 0 to issue the signal IR B1. All instructions that use bus B2 issue the control signal R B2. This holds true for both IR 31 = 0 and IR 31 = 1. We just assert R B2 whenever the control unit is in (PC)Fetch, T3). All instructions with IR 31 = 0, IR 30 = 1, and IR 29 = 1 issue the control signals B3 MAR, add. All instructions with IR 31 = 0, IR 30 = 0, and IR 29 = 0 that use bus B3 issue the control signal B3 R.
Here it is. The handling of IR 31 in the book is not correct.
Execute, T GET: IOD B2, tra2 , B3 R. PUT: IR B1, tra1 , B3 IOA. LDR: MBR B2, tra2 , B3 R. JSR: SP B1, tra1 , B3 MAR, WRITE. Execute, T RET: MBR B2, tra2 , B3 PC. JSR: SP B1, 1 B2, add , B3 SP. BR: MAR B1, tra1 , B3 PC.