



Introduction to
Real-Time Systems
Docsity.com












Study with the several resources on Docsity

Earn points by helping other students or get them with a premium plan

Prepare for your exams
Study with the several resources on Docsity
Earn points to download
Earn points by helping other students or get them with a premium plan
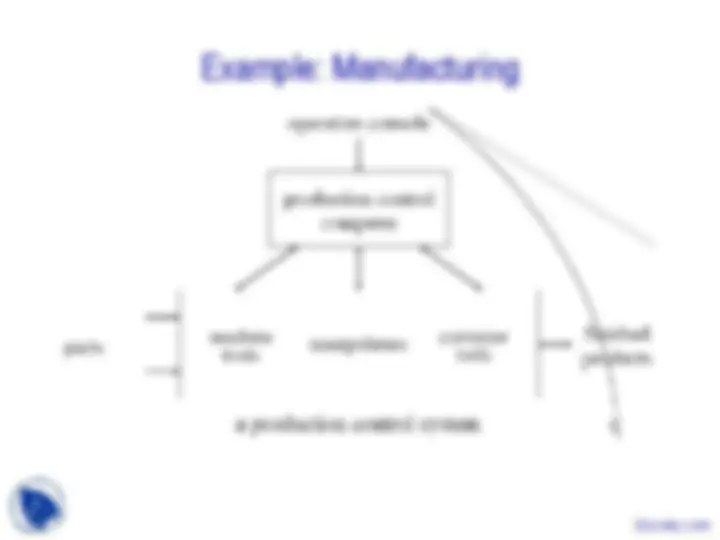
An introduction to real-time systems, explaining their definition, distinguishing features from embedded systems, and various classifications. Real-time systems ensure predictable and timely responses, with examples including cruise control and manufacturing systems. The document also covers terminology, misconceptions, static vs. Dynamic systems, operating systems, and real-time operating systems.
Typology: Slides
1 / 22

This page cannot be seen from the preview
Don't miss anything!
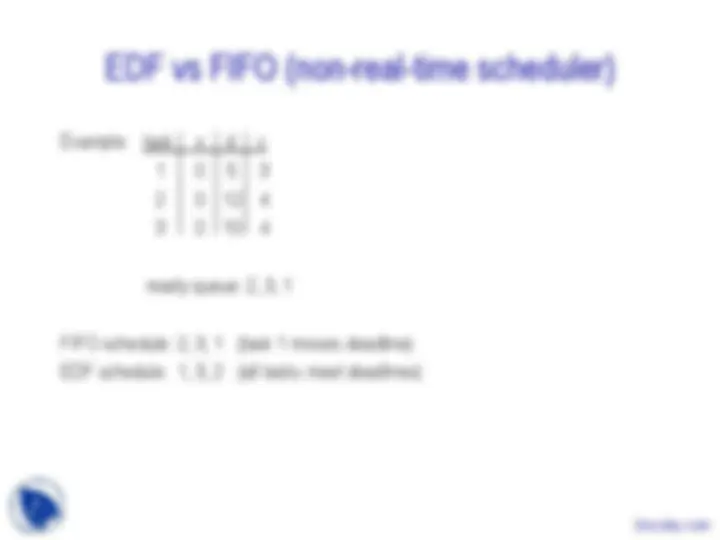
c computation time s start (release or ready) time d deadline (relative to start time) p period or minimum separation