


UNIVERSIDAD DE BUENOS AIRE S
FACU LTAD DEINGENIER´
IA
A˜
no 2015 - 1er Cuatrimestre
´
ALG EB RA II A (61.08)
Resumen de ´
Algebra II
INTEGRANTE:
Maria In´
es Parnisari - 92235
Men´
endez, Mart´
ın Nicol´
as - 92830











Prepara tus exámenes y mejora tus resultados gracias a la gran cantidad de recursos disponibles en Docsity

Gana puntos ayudando a otros estudiantes o consíguelos activando un Plan Premium

Prepara tus exámenes
Prepara tus exámenes y mejora tus resultados gracias a la gran cantidad de recursos disponibles en Docsity
Prepara tus exámenes con los documentos que comparten otros estudiantes como tú en Docsity
Encuentra los documentos específicos para los exámenes de tu universidad
Estudia con lecciones y exámenes resueltos basados en los programas académicos de las mejores universidades
Responde a preguntas de exámenes reales y pon a prueba tu preparación
Consigue puntos base para descargar
Gana puntos ayudando a otros estudiantes o consíguelos activando un Plan Premium
Comunidad
Pide ayuda a la comunidad y resuelve tus dudas de estudio
Ebooks gratuitos
Descarga nuestras guías gratuitas sobre técnicas de estudio, métodos para controlar la ansiedad y consejos para la tesis preparadas por los tutores de Docsity
Asignatura: penal, Profesor: Pinar Agudiez Calvo, Carrera: Enfermería, Universidad: UAM
Tipo: Apuntes
1 / 36

Esta página no es visible en la vista previa
¡No te pierdas las partes importantes!
A˜no 2015 - 1er^ Cuatrimestre
Maria In´es Parnisari - 92235 〈[email protected]〉
Men´endez, Mart´ın Nicol´as - 92830 〈[email protected]〉
1 Matrices
Dadas las matrices A, B, C se tiene que:
A + B = B + A
A + (B + C) = (A + B) + C
α(A + B) = αA + αB
(α + β)A = αA + βA
α (βA) = (αβ)A
A + 0n = A
A + (−A) = 0n
A(B + C) = AB + AC
(A + B)C = AC + BC
A(BC) = (AB)C
α(AB) = (αA)B = A(αB)
A (^0) n = 0n
Propiedades de matrices
Dadas las matrices A, B, C se tiene que:
Propiedades de la inversa: ( A−^1
(αA)−^1 =
α
, α 6 = 0
(An)−^1 =
)n
adj(A) |A|
Propiedades de la traza:
tr(A+B) = tr(A)+tr(B)
tr(AB) = tr(BA)
tr(αA) = αtr(A)
tr(AT^ ) = tr(A)
Propiedades de la traspuesta:
(A + B)T^ = AT^ + BT
(AB)T^ = BT^ AT ( AT^
(αA)T^ = αAT ( AT^
Propiedades de matrices
Sean A, B ∈ Rn×m ∣ ∣AT^
Si B la obtengo de sumar k veces una fila de A sobre otra:
|B| = |A| (1.3)
Si B la obtengo de intercambiar k veces las fila de A:
|B| = (−1)k^ |A| (1.4)
Si B la obtengo de multiplicar por k, n veces las filas de A:
|B| = kn^ |A| (1.5)
Si A es una matriz triangular:
∏^ n
i=
aii (1.6)
Propiedades de determinantes
Sean A ∈ Rn×m^ , B ∈ Rr×n, se define:
Espacio Fila: Fif(A) = {x ∈ Rm|x es combinaci´on lineal de las filas de A}
Espacio Columna: Col(A) = {b ∈ Rn|Ax = b para alguna x}
Espacio nulo: Nul(A) = {x ∈ Rm|Ax = 0}
Espacio fila,columna y nulo de matrices
2 Espacios vectoriales
S es un subespacio vectorial del espacio VK si y solo si:
(^0) V ∈ S (2.1) (αX + Y ) ∈ S, ∀X, Y ∈ V y ∀α ∈ K (2.2)
Propiedades de los subespacios
El vector x es una combinaci´on lineal de v 1 , v 2 ,... , vn si:
x =
∑^ n
i=
αivi (2.3)
Y si a 1 ,... , an no son todos nulos.
Combinaci´on lineal
x es linealmente independiente si:
∑^ n
i=
αivi = 0 , y (2.4)
ai = 0∀i (2.5)
Dos vectores son linealmente dependientes si son proporcionales. Un subconjunto de un conjunto lineal- mente dependiente sigue siendo linealmente dependiente
Intersecci´on: S =
⋂^ n
i=
Si = {x ∈ V |x ∈ Si , ∀i = 1,... , n}
Suma: S =
∑^ n
i=
Si = gen
{ (^) m ⋃
i=
Bi
, donde Bi es una base de Si
Uni´on: S = S 1 ∪ S 2 es un subespacio cuando S 1 ⊆ S 2 o´ S 2 ⊆ S 1
Suma directa: S 1 ,... , Sk est´an en suma directa ⇐⇒ la uni´on de sus bases es base de V
Dos subespacios son suplementarios cuando est´an en suma directa y su suma es todo el espacio.
Si Dim(V ) = n, {v 1 ,... , vn} es base de V si y solo si:
{v 1 ,... , vn} genera V (2.6) {v 1 ,... , vn} son linealmente independientes (2.7)
Bases
Si {v 1 ,... , vn} es base de un espacio vectorial B y x =
∑^ n
i=
αivi, entonces CB (x) = (α 1 ,... , αn)
Dado un vector y una base, las coordenadas de ese vector en esa base son ´unicas.
∀v, w ∈ V y ∀k ∈ K:
CB (v + w) = CB (v) + CB (w) (2.8) CB (k × v) = k × CB (v) (2.9)
Finalmente {v 1 ,... , vn} son linealmente independientes ⇐⇒ {CB (v 1 ),... , CB (vn)} lo son para cualquier base de B.
Sean B = {v 1 ,... , vn} y C = {w 1 ,... , wn} bases del espacio V. Las matrices de cambio de base son:
CC (v 1 ) CC (v 2 )... CC (vn) | | |
CB (w 1 ) CB (w 2 )... CB (wn) | | |
Si B y C son bases ortonormales, entonces CBC es una matriz ortogonal.
Dados los subespacios S, H y T :
Dim(S + H) = Dim(S) + Dim(H) − Dim(S ∩ H) (2.12) Dim(S + H + T ) = Dim(S) + Dim(H) + Dim(T ) − Dim(S ∩ (H + T )) − Dim(H ∩ T ) (2.13)
Se define la norma de un vector como:
|x|^2 = (x, x) (3.2)
La norma de un vector depende del producto interno, pero cumple las siguientes propiedades:
|x| ∈ R∀x ∈ V
|x| ≥ 0 (|x| = 0 ⇐⇒ x = 0)
|k · x| = |k| · |x|
Desigualdad de Cauchy-Schwarz:
|(x, y)| ≤ |x| · |y| , x, y ∈ VK (3.3)
La igualdad se cumple si x ‖ y
Desigualdad triangular:
|x + y| ≤ |x| + |y| (3.4)
Teorema de pit´agoras: Si x⊥y entonces:
|x + y|^2 = |x|^2 + |y|^2 (3.5)
La rec´ıproca solo vale para R
Identidad del paralelogramo:
|x + y|^2 + |x − y|^2 = 2
|x|^2 + |y|^2
, ∀x, y ∈ V (3.6)
Los elementos pueden ser de cualquier espacio vectorial, se utilizaron vectores por comodidad.
norma de un vector
Dado x, y:
cos(θ) =
(x, y) |x| · |y|
Con θ ∈ [0, π], ∀x, y 6 = 0 para espacios vectoriales reales con producto interno.
Los elementos pueden ser de cualquier espacio vectorial, se utilizaron vectores por comodidad.
Angulo entre dos vectores^ ´
Sea A ⊂ VK · A⊥^ = {x ∈ VK |(x, y) = 0, ∀y ∈ A}
Para el c´alculo del complemento ortogonal a un subespacio de dimensi´on finita, alcanza con exigir la ortogonalidad a un sistema de generadores
Los elementos pueden ser de cualquier espacio vectorial, se utilizaron vectores por comodidad.
Complemento ortogonal
Dados x,y, se define la funci´on distancia como:
d : VR × VR → R+^ : d(x, y) = |x − y| = |y − x| (3.8)
Los elementos pueden ser de cualquier espacio vectorial, se utilizaron vectores por comodidad.
Distancia entre vectores
Sea B = {v 1 ,... , vk} base de VK. Entonces G ∈ Kk×k, gij = (vi, vj ) es la matriz de producto interno:
|v 1 |^2... (v 1 , vk) .. .
(vk, v 1 )... |vk|^2
Si B es base de VK y G es la matriz del producto interno en esa base, entonces ∀x, y ∈ V :
(x, y) = CHB (x) · G · CB (y) (3.10)
Dada la matriz G de producto interno se tiene que:
gii ≥ 0 , ∀i = 1,... , k (3.11) GH^ = H (3.12) G es definida positiva (3.13) ∃G−^1 (3.14) G de una Base Ortogonal (BOG) es una matriz diagonal (3.15) G de una Base Ortonornal (BON) es una matriz identidad (3.16)
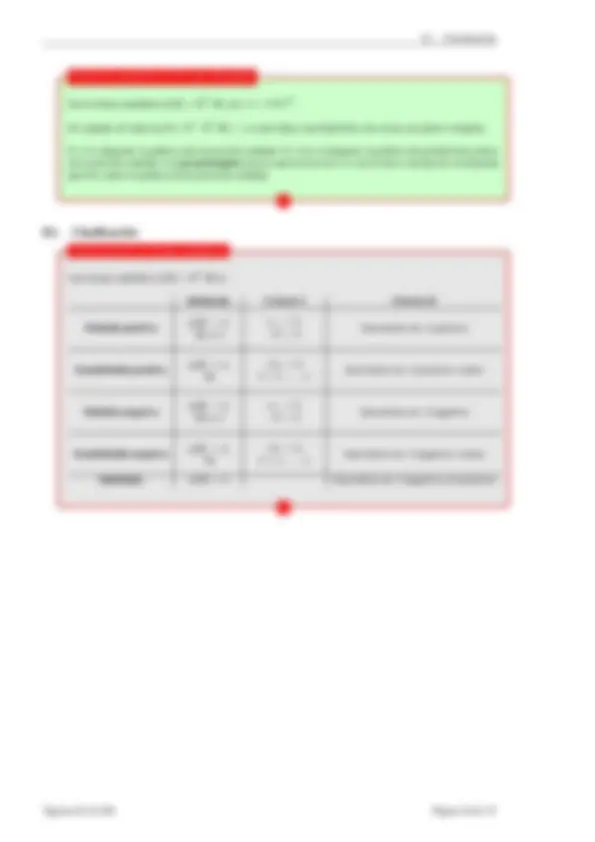
4.2.1. Proyecci´on y transformaciones lineales
Sea T : VK → VK una transformaci´on lineal tal que:
Im(PS ) = S (4.4) Nul(PS ) = S⊥^ (4.5)
Y sea B = {v 1 ,... , vq ︸ ︷︷ ︸ ∈S
, vq+1,... , vn ︸ ︷︷ ︸ ∈S⊥
} una base de V, entonces la matriz de la transformaci´on lineal es:
Tantos 1 como la dimensi´on del espacio sobre el cual proyecto, y tantos 0 como la dimensi´on del comple- mento ortogonal.
Nota: La matriz de un operador proyecci´on en una Base Ortonormal (BON) es una matriz de proyecci´on. En cualquiera otra base, no lo es.
Proyecciones y Transformaciones lineales
4.2.2. Reflexi´on y transformaciones lineales
Sea T : VK → VK una transformaci´on lineal tal que:
T (v) = v, ∀v ∈ S (4.7) T (v) = −v, ∀v ∈ S⊥^ (4.8)
Y sea B = {v 1 ,... , vq ︸ ︷︷ ︸ ∈S
, vq+1,... , vn ︸ ︷︷ ︸ ∈S⊥
} una base de V, entonces la matriz
de la transformaci´on lineal es:
Tantos 1 como la dimensi´on del espacio sobre el cual proyecto, y tantos -1 como la dimensi´on del complemento ortogonal.
Nota: La matriz de un operador proyecci´on en una Base Ortonormal (BON) es una matriz de proyecci´on. En cualquiera otra base, no lo es.
Proyecciones y Transformaciones lineales
Figura 4.1: Proyecci´on y reflexi´on
4.3 Matriz de Householder
La matriz de reflexi´on sobre un subespacio de dimensi´on n − 1 que es ortogonal a un vector w en un espacio de dimensi´on n se puede obtener mediante la expresi´on:
H = Id − 2
w · wT wT^ · w
Dicha matriz tiene las siguientes propiedades:
Es involutiva: H ◦ H = Id
Es sim´etrica: HT^ = H
Es inversible: ∃H−^1 y ∃H−^1 = H
Es ortogonal: HT^ H = HHT^ = Id
Propiedades de la proyecci´on
Sea B = {v 1 , v 2 , v 3 } una Base Ortonormal (BON) de R^3 y sea T la rotaci´on θ grados alrededor del eje vi:
Rotaci´on sobre v 1 : [T ]B =
0 cos(θ) − sin(θ) 0 sin(θ) cos(θ)
Rotaci´on sobre v 2 : [T ]B =
cos(θ) 0 − sin(θ) 0 1 0 sin(θ) 0 cos(θ)
Rotaci´on sobre v 3 : [T ]B =
cos(θ) − sin(θ) 0 sin(θ) cos(θ) 0 0 0 1
Dada una base {x 1 , x 2 ,... , xp} para un subespacio W ∈ Rn^ defina:
v 1
p∑− 1
i=
xp · vi vi · vi
vi
Entonces {v 1 , v 2 ,... , vp} es una Base Ortogonal (BOG) de W.
Si luego se divde a cada componente por la norma de la base se obtiene una Base Ortogonal (BON) de W.
Sea A ∈ Kn×q^ , x ∈ Kq^ , b ∈ Rn. Si Ax = b tiene una soluci´on extra, entonces b ∈ Col(A). Si b ∈/ Col∣ (A), intentamos hallar una soluci´on ˆx ∈ Kq^ (la soluci´on por cuadrados m´ınimos) tal que: ∣ ∣Aˆx^ −^ b
∣Au − b
∣, ∀u ∈ Kq
d(Aˆx, b) ≤ d(Au, b), ∀u ∈ Kq ∣ ∣ ∣Aˆx
∣b
∣ (^) (Son iguales si b ∈ Col(A))
Ecuaciones normales de cuadrados m´ınimos: AT^ Aˆx = AT^ b = ˆb
Aˆx = ˆb = PCol(A)(b) si y solo si:
Aˆx ∈ Col(A) (4.17) b − Aˆx ∈ Col(A)⊥^ (4.18)
Figura 4.2: Cuadrados m´ınimos
Cuadrados m´ınimos
ˆx = (AT^ A)−^1 AT^ b = A#b (4.19)
Si las columnas de A son linealmente dependientes, el sistema AT^ Aˆx = AT^ b tiene infinitas soluciones, y ´estas son de la forma ˆx = ˆxp + ˆxn ︸︷︷︸ ∈Nul(A)
∣b − ˆb
Propiedades de Cuadrados m´ınimos
4.8.1. Norma m´ınima
La soluci´on por cuadrados m´ınimos de norma m´ınima pertenece al espacio Fil(A)y se obtiene como:
˜x = A+b (4.20)
Siendo A+^ la pseudoinversa de Moore-Penrose de A.
Pseudoinversa de Moore-Pensore
Sean los puntos Pi = (xi, yi) con i = 1, 2 ,... , n. La recta que mejor aproxima a los puntos es:
y = α 01 + α 1 x (4.21)
Y los coeficientes αi se obtienen resolviendo el sistema:
1 x 1 1 x 2 .. .
1 xn
α 0 α 1
y 1 y 2 .. . yn
Si se aproxima por una par´abola se agrega otro nivel de complejidad, con y = α 2 x^2 + α 1 x + α 0 , lo que implica una columna adicional a la matriz para los t´erminos cuadr´aticos, una fila adicional para la constante α 2 en la variable.
Se siguen agregando columnas a la matriz y filas al vector tantas veces como grados de complejidad se necesiten.
Regresi´on lineal
Sea T ∈ `(VK , WK ) y A = [T ]BC con B base de V y C base de W la matriz de T.
Para que una transformaci´on se considere lineal debe cumplir:
Condiciones para ser Transformaci´on lineal
N ´ucleo: Nul(T ) = {v ∈ VK | T (v) = 0W } = C B− 1 (Nul(A)). Im´agen: Im(T ) = {w ∈ WK | T (v) = w con v ∈ VK } = C C− 1 (Col(A)).
Ambos son subespacios vectoriales.
La im´agen de una Transformaci´on Lineal puede obtenerse como lo que generan los transformados de una base del espacio de partida.
5.3.3. Isomorfismo(Biyectividad)
Una Transformaci´on lineal es biyectiva si y solo si:
Dim(W ) = Dim(V ) (5.5) Nul(T ) = { (^0) V } (5.6)
Es decir, si es Inyectiva y Sobreyectiva a la vez.
T es biyectiva ⇐⇒ si {v 1 ,... , vn} es base de V ⇒ {T (v 1 ),... , T (vn)} es base de W La matriz asociada a una Transformaci´on lineal biyectiva tiene sus filas y columnas Linealmente Inde- pendientes, o sea que es una matriz inversible, es decir, existe una transformaci´on lineal inversa T −^1 = [T ]−^1
Si Dim(V ) = Dim(W ), entonces o bien T es inyectiva y sobreyectiva, o no es ninguna de las dos.
Biyectividad
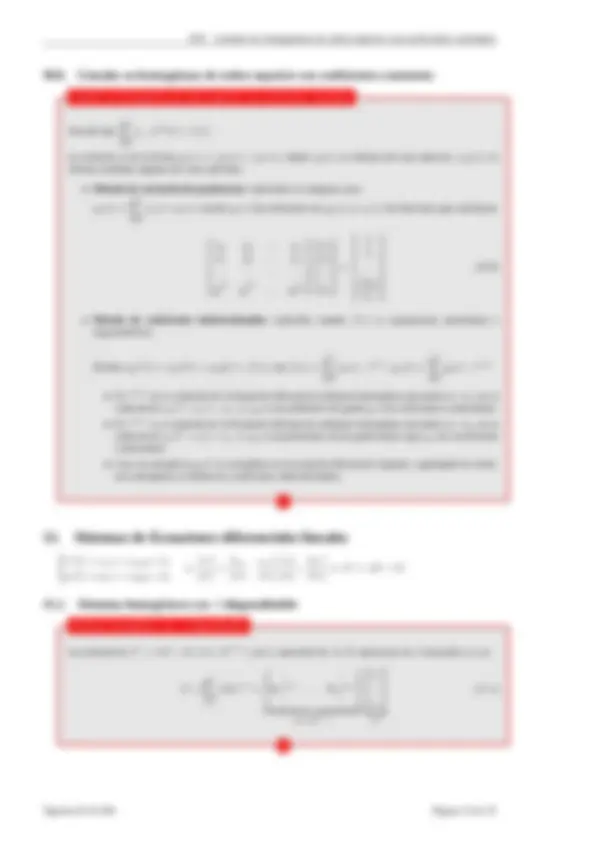
Sea T ∈ `(VK , WK ), sea B = {v 1 ,... , vq } base de V y C = {w 1 ,... , wm} base de W. Entonces T se puede escribir como T (x) = Ax, con A ∈ Km×q^ tal que:
CC (T (v 1 )) CC (T (v 2 ))... CC (T (vq )) | | |
Dicha matriz posee las siguientes propiedades:
[T ]BC · CB (v) = CC (T (v)) , ∀v ∈ V
v ∈ Nul(T ) ⇐⇒ CB (v) ∈ Nul(A)
w ∈ Im(T ) ⇐⇒ CC (w) ∈ Col(A)
Dim(Im(T )) = rango (A)
Matriz de la Transformaci´on lineal
Sean V y W K-espacios vectoriales (K = R o C). Sea T : V → W.
Si B 1 y B 2 son bases ordenadas de V , y C 1 y C 2 son bases ordenadas de W , entonces:
rango ([T ]B 1 C 1 ) = rango ([T ]B 2 C 2 ) (5.8)
Teorema para matrices de Transformaci´on lineal
Sea B = {v 1 ,... , vn} base de V y w 1 ,... , wn vectores de W. Entonces existe y es ´unica la Transformaci´on lineal que verifica:
T (vi) = wi , ∀i = 1,... , n (5.9)
Adem´as, dada una Transformaci´on lineal y un par de bases, existe una ´unica matriz asociada.
La rec´ıproca tamb´ıen es verdadera: dada una matriz y un par de bases, existe una ´unica Transformaci´on lineal asociada.
Sea f ∈ (V, W ) y g ∈(W, H) ⇒ g ◦ f ∈ (V, H). Podemos encontrar la siguientes propiedades:
Nul(f ) ⊆ Nul(g ◦ f ) (5.10) Im(g ◦ f ) ⊆ Im(g) (5.11)
Figura 5.1: Composici´on
Un operador lineal es una Transformaci´on lineal que va de un espacio en si mismo, se escr´ıbe como T ∈ `(V ) y cuenta con las siguientes propiedades:
Si T 1 ∈ (V ) y T 2 ∈(V ), entonces T 1 ◦ T 2 ∈ `(V )
Si T ∈ `(V ), T n^ = T︸ ◦ T ◦︷︷... ◦ T︸ n veces