



Cinemática y Dinámica
de Robots
Semana 7 –Sesión 1
Dinámica de Robots / Repaso




























Prepara tus exámenes y mejora tus resultados gracias a la gran cantidad de recursos disponibles en Docsity

Gana puntos ayudando a otros estudiantes o consíguelos activando un Plan Premium

Prepara tus exámenes
Prepara tus exámenes y mejora tus resultados gracias a la gran cantidad de recursos disponibles en Docsity
Prepara tus exámenes con los documentos que comparten otros estudiantes como tú en Docsity
Encuentra los documentos específicos para los exámenes de tu universidad
Estudia con lecciones y exámenes resueltos basados en los programas académicos de las mejores universidades
Responde a preguntas de exámenes reales y pon a prueba tu preparación
Consigue puntos base para descargar
Gana puntos ayudando a otros estudiantes o consíguelos activando un Plan Premium
Comunidad
Pide ayuda a la comunidad y resuelve tus dudas de estudio
Ebooks gratuitos
Descarga nuestras guías gratuitas sobre técnicas de estudio, métodos para controlar la ansiedad y consejos para la tesis preparadas por los tutores de Docsity
Una introducción a la dinámica de robots, abordando conceptos clave como el centro de masa, el momento de inercia y el tensor de inercia. Se explica la ecuación dinámica general de un manipulador robótico y se desarrolla la solución analítica para la dinámica inversa de un robot planar de dos eslabones. Se incluyen ejemplos numéricos para verificar los resultados obtenidos. El objetivo es que el estudiante pueda comprender las configuraciones singulares y argumentar su utilidad con claridad y criterio.
Tipo: Resúmenes
1 / 45

Esta página no es visible en la vista previa
¡No te pierdas las partes importantes!
Dinámica de Robots / Repaso
Temas para el día de hoy:
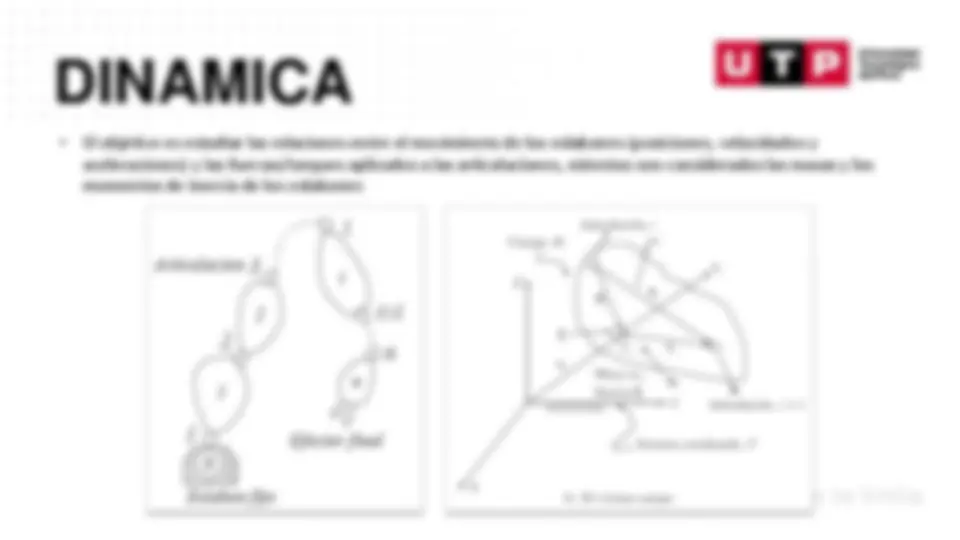
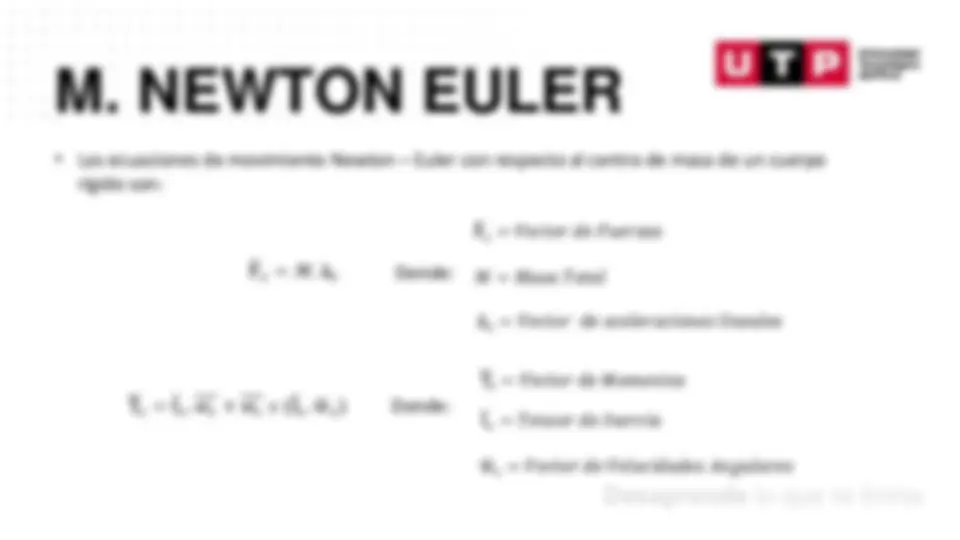
aceleraciones) y las fuerzas/torques aplicados a las articulaciones, mientras son considerados las masas y los
momentos de inercia de los eslabones
𝑐
𝑐
𝑐
𝑐
𝑥𝑥
𝑥𝑦
𝑥𝑧
𝑥𝑦
𝑦𝑦
𝑦𝑧
𝑥𝑧
𝑦𝑧
𝑧𝑧
𝐴
𝑥𝑥
𝑥𝑦
𝑥𝑧
𝑥𝑦
𝑦𝑦
𝑦𝑧
𝑥𝑧
𝑦𝑧
𝑧𝑧
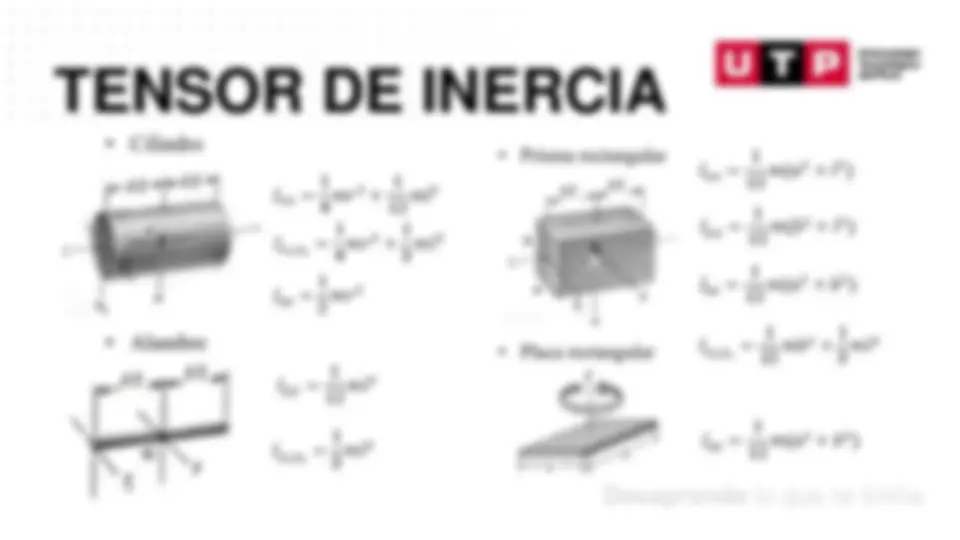
𝑥𝑥
2
2
)𝜌𝑑 υ
𝑦𝑦
2
2
)𝜌𝑑 υ
𝑧𝑧
2
2
)𝜌𝑑 υ
𝑥𝑦
= ම 𝑥𝑦𝜌𝑑 υ
𝑥𝑧
= ම 𝑥𝑧𝜌𝑑 υ
𝑦𝑧
= ම 𝑦𝑧𝜌𝑑 υ
𝑖= 1
𝑛
𝑖
𝑖= 1
𝑛
𝑖
𝑖
𝑖
υത 𝑐𝑖
. υത 𝑐𝑖
𝑖
υത 𝑐𝑖
𝑇
. (υത 𝑐𝑖
𝑖
𝑖
υത 𝑐𝑖
𝑇
. υത 𝑐𝑖
𝑖
wഥ 𝑐𝑖
𝑇
𝑐𝑖
. (υത 𝑐𝑖
𝑖
𝑖
𝑐𝑖
𝑖
𝑇
. 𝐼 𝑐𝑖
𝑐𝑖
𝑖
𝑖
𝑖
𝑐
𝑐
𝑐
𝑐
𝑐
𝑐
𝑐
𝑐
𝑐
a ത 𝑐
𝑐
ҧ I 𝑐
w ഥ 𝑐
1
2
1
𝑐
1
1
1
1
𝑐
2
1
𝑐
1
1
1
1
𝑐
2
1
12
2
𝑐
1
1
𝑐
1
𝑐
1
𝑐
𝑐
1
𝑐
1
1
𝑐
𝑐
1
1
𝑐
1
1
1
1
1
𝑐
2
1
2
2
𝑐
1
𝑐 2
1
2
𝑐 2
1
2
𝑐
1
𝑐
1
2
𝑐
1
2
𝑐
1
1
𝑐 2
1
2
𝑐 2
1
2
𝑐
1
𝑐
1
2
𝑐
1
2
1
2
𝑐
1
1
𝑐
1
2
1
𝑐
2
1
2
1
1
𝑐
1
2
1
𝑐
2
1
2
2
1
2