



CONTROLADOR PWM



Prepara tus exámenes y mejora tus resultados gracias a la gran cantidad de recursos disponibles en Docsity

Gana puntos ayudando a otros estudiantes o consíguelos activando un Plan Premium

Prepara tus exámenes
Prepara tus exámenes y mejora tus resultados gracias a la gran cantidad de recursos disponibles en Docsity
Prepara tus exámenes con los documentos que comparten otros estudiantes como tú en Docsity
Encuentra los documentos específicos para los exámenes de tu universidad
Estudia con lecciones y exámenes resueltos basados en los programas académicos de las mejores universidades
Responde a preguntas de exámenes reales y pon a prueba tu preparación
Consigue puntos base para descargar
Gana puntos ayudando a otros estudiantes o consíguelos activando un Plan Premium
Comunidad
Pide ayuda a la comunidad y resuelve tus dudas de estudio
Ebooks gratuitos
Descarga nuestras guías gratuitas sobre técnicas de estudio, métodos para controlar la ansiedad y consejos para la tesis preparadas por los tutores de Docsity
explicacion del controlador pwm
Tipo: Apuntes
1 / 5

Esta página no es visible en la vista previa
¡No te pierdas las partes importantes!
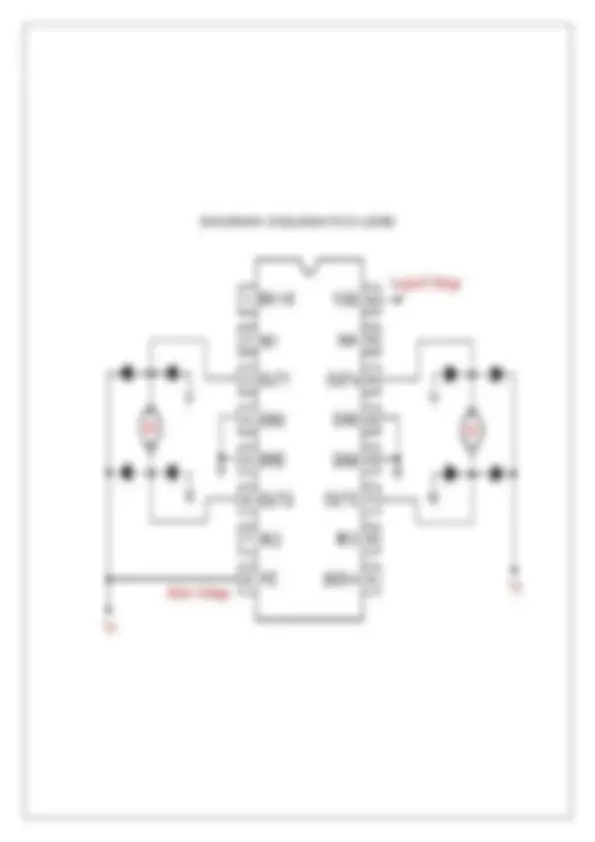
El L293D es un controlador de motor de doble canal H-Bridge capaz de accionar un par de motores de corriente continua o un motor de paso a paso. Eso significa que puede accionar individualmente hasta dos motores, lo que lo hace ideal para construir plataformas de robots de dos ruedas. Suministro de energía El motor L293D IC tiene dos pines de entrada de energía, a saber, ‘Vcc1’ y ‘Vcc2’. Vcc1 se usa para manejar el circuito lógico interno que debe ser de 5V. De la clavija Vcc2, el Puente H obtiene su energía para impulsar los motores que pueden ser de 4.5V a 36V. Y ambos se hunden en un terreno común llamado GND. Terminales de salida L293D Los canales de salida del conductor del motor L293D para el motor A y B se llevan a los pines OUT1,OUT2 y OUT3,OUT4 respectivamente. Puedes conectar dos
Por lo tanto, conectaremos una fuente de alimentación externa de 9V a la clavija Vcc2. Luego, necesitamos suministrar 5 voltios para los circuitos lógicos del L293D. Conecta la clavija Vcc1 a la salida de 5V en Arduino. Asegúrate de que compartes todas las tierras del circuito. Ahora, los pines de entrada y habilitación (ENA, IN1, IN2, IN3, IN4 y ENB) del IC L293D están conectados a seis pines de salida digital de Arduino (9, 8, 7, 5, 4 y 3). Nótese que los pines de salida de Arduino 9 y 3 están ambos habilitados para PWM. Finalmente, conecta un motor a través de OUT1 & OUT2 y el otro motor a través de OUT3 & OUT4. Puedes intercambiar las conexiones de tu motor, técnicamente, no hay una manera correcta o incorrecta. Cuando termines, debería tener algo que se parezca a la ilustración que se muestra a continuación.