¡Descarga EQUILIBRIO DEL PUNTO MATERIAL y más Apuntes en PDF de Física solo en Docsity!
1. Grados de libertad y ligaduras
2. Tipos de sistemas según su número de grados de libertad
3. Ligaduras en sistemas planos
4. Equilibrio del punto material: diagrama de punto aislado
5. Equilibrio del sólido rígido: diagrama de cuerpo aislado
6. Sólido en equilibrio sometido a sólo dos fuerzas
TEMA 2
EQUILIBRIO DEL PUNTO
MATERIAL Y DEL SÓLIDO
RÍGIDO
1. Grados de libertad y ligaduras: definiciones y ejemplos
La posición de un punto en el espacio queda definida por su vector de posición r
Coordenadas cartesianas
Coordenadas cilíndricas
Coordenadas esféricas
r ( x , y , z )
r ( , , z )
r ( r ,, )
Hacen falta 3 coordenadas para definir la posición de un punto en el espacio.
Se dice que el punto en el espacio tiene 3 GRADOS DE LIBERTAD
Ejemplos
Ejemplo 1: Partícula obligada a moverse en una superficie
Las coordenadas (x,y,z) del punto P donde se encuentra la partícula deben cumplir la ecuación de la superficie:
f(x,y,z)=
Se trata, por tanto, de una ligadura holónoma simple, que quita un grado de libertad
Es el caso, por ejemplo, de una partícula encima de una mesa. La mesa es una ligadura holónoma simple (suponiendo que la partícula no puede salir de la superficie de la mesa).
En este caso, la ecuación de la ligadura es
z=
Para definir la posición de la partícula, necesitamos dos coordenadas (x,y). Por tanto, la partícula tiene 2 grados de libertad:
3 (partícula libre)-1(ligadura simple)=
Ejemplo 2: Partícula obligada a moverse en una curva
Las coordenadas (x,y,z) del punto P donde se encuentra la partícula deben cumplir las ecuaciones de las dos superficies que intersectadas forman la curva:
f 1 (x,y,z)=
f 2 (x,y,z)=
Se trata, por tanto, de una ligadura holónoma doble, que quita dos grados de libertad
Es el caso, por ejemplo, de una partícula sobre una recta. La recta supone una ligadura holónoma doble.
En este caso, la ecuaciones de la ligadura son
y=
z=
Para definir la posición de la partícula, necesitamos una coordenada (x). Por tanto, la partícula tiene 1 grado de libertad:
3 (partícula libre)-2(ligadura doble)=
2. Tipos de sistemas según su número de grados de libertad
Sistema de N partículas libres
Cada partícula tiene 3 grados de libertad
L(número de grados del sistema)=3N
Sistema de N partículas ligadas
con K ligaduras holónomas
L(número de grados del sistema)=3N-K K ≤ 3N
L>
SISTEMA HIPOSTÁTICO
O PARCIALMENTE LIGADO
Tiene capacidad de movimiento
De estos sistemas se ocupa la DINÁMICA
L=
SISTEMA ISOSTÁTICO
No tiene capacidad de movimiento y se usa el número justo de ligaduras
De estos sistemas se ocupa la ESTÁTICA L=
SISTEMA HIPERESTÁTICO
Si un sistema isostático es sometido a nuevas ligaduras adicionales, compatibles con las anteriores, se obtiene un sistema hiperestático. No tiene capacidad de movimiento y tiene ligaduras en exceso
De estos sistemas se ocupa la RESISTENCIA DE MATERIALES
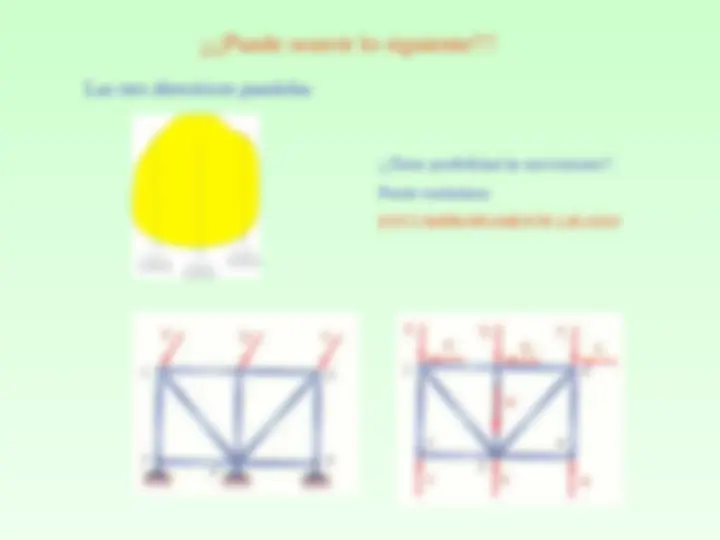
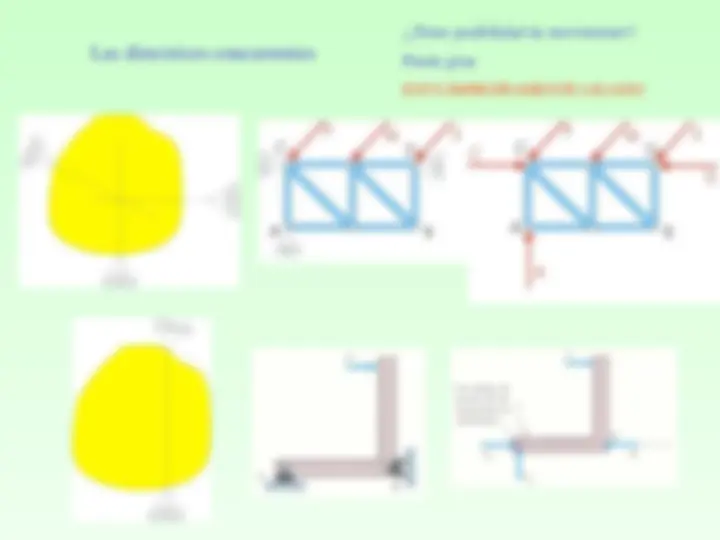
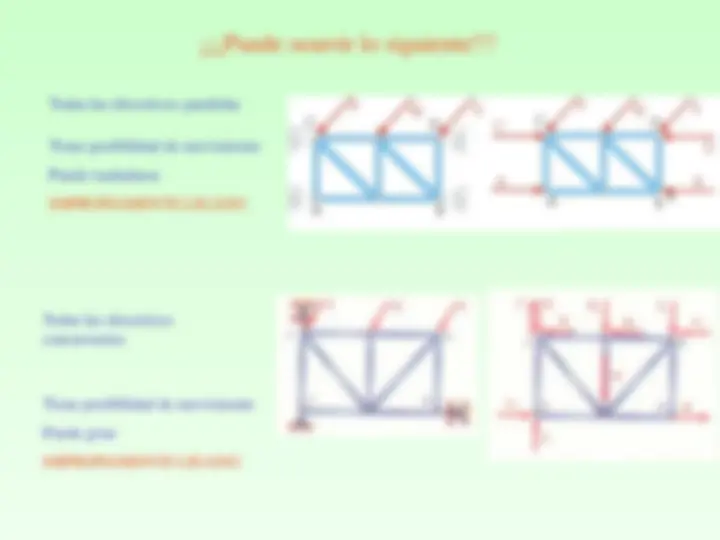
Puede ocurrir que un sistema, aún cuando tenga el número adecuado de ligaduras para ser Isostático o Hiperestático, estas ligaduras estén mal colocadas y posea cierta capacidad de movimiento. Se dice que el sistema está:
SISTEMA IMPROPIAMENTE LIGADO
¡¡¡¡CUIDADO!!!!
Dos puntos: N=
Ligaduras:
-Los puntos están en el plano z 1 =
z 2 =
-Los puntos pertenecen a un sólido rígido
d 12 =constante
Por tanto:
L=3N-K=3•2-3=
¡¡Tiene 3 grados de libertad!!
Movimiento vertical Movimiento horizontal Giro en el plano
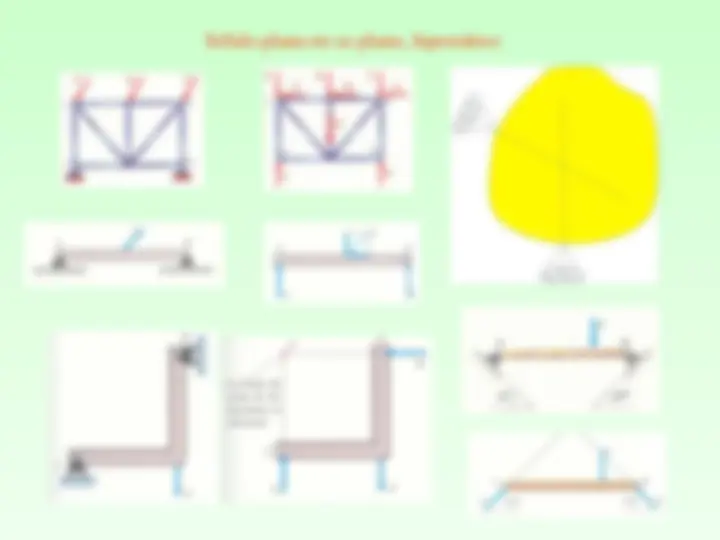
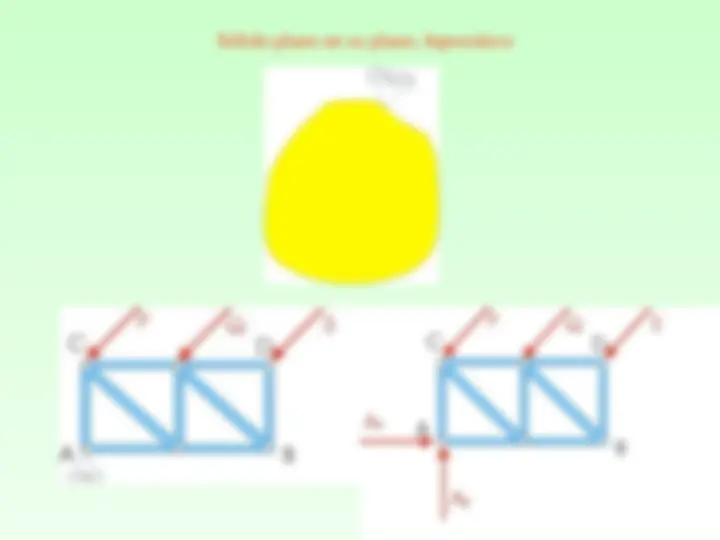
Ejemplo 2: Sólido rígido plano en su plano, con un punto fijo
Respecto del ejemplo de antes tenemos una ligadura doble:
x 0 =constante
y 0 =constante
Por tanto
L=Ldel caso anterior-2=3-2=
¡¡Tiene 1 grado de libertad!!
Giro en el plano respecto del punto P fijo
Movimiento vertical Movimiento horizontal
Giro en el plano del cuerpo 1 Giro en el plano del cuerpo 2
Ejemplo 4: Sólido rígido en el espacio
Al igual que en el ejemplo 1, se puede demostrar que:
Para definir la posición de un sólido rígido en el espacio solo se necesita localizar la posición de tres puntos, pues conocidos esos tres, ya se pueden conocer los demás
Tres puntos: N=
Ligaduras: Los puntos pertenecen a un sólido rígido
d 12 =constante
d 13 =constante d 23 =constante
Por tanto:
L=3N-K=3•3-3=
¡¡Tiene 6 grados de libertad!!
-Tres movimientos de traslación, cada uno a lo largo de un eje coordenado.
-Tres rotaciones, alrededor de los tres ejes.
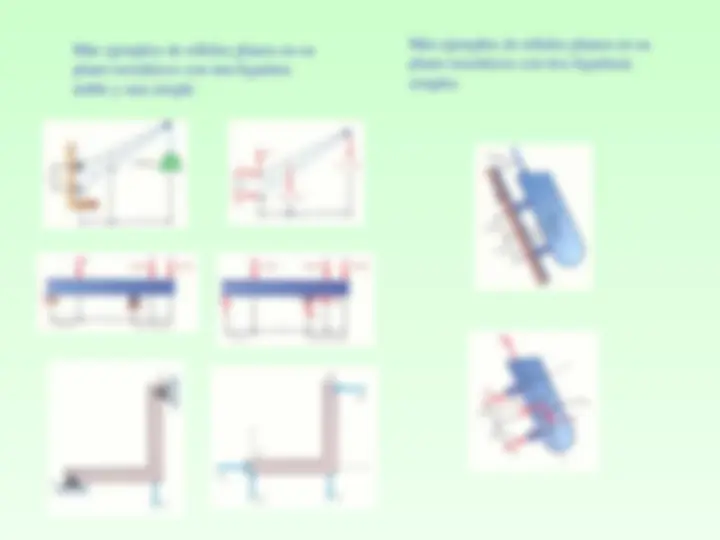
Ligaduras simples
Su reacción es una fuerza de directriz conocida
- Hilo, cuerda, cadena o cable flexible (no holónomas)
Ejerce siempre una fuerza, R , de tracción sobre el cuerpo.
De ella se conoce su directriz, que es la dirección del hilo, cuerda o cadena o cable, y su punto de aplicación es el punto de amarre.
- Conexión rígida o biela
Ejerce sobre el cuerpo una fuerza, R , de tracción o compresión.
De ella se conoce su directriz, que es la dirección del eje de conexión de la cuerda o cadena o cable, y su punto de aplicación es el punto de amarre.
- Bola, rodillo o balancín
Ejerce sobre el cuerpo una fuerza, R , de compresión.
De ella se conoce su directriz: Es perpendicular a la superficie de apoyo de la bola, rodillo o balancín.
- Superficie lisa (plana o curva) (no holónoma)
Ejerce una fuerza, R , de compresión sobre el cuerpo.
De ella se conoce su directriz: Es perpendicular a la superficie lisa en el punto de contacto entre el cuerpo y la superficie.
Ligaduras dobles
Su reacción es una fuerza de directriz desconocida aplicada en un punto conocido
- Pasador liso, articulación o charnela
Ejerce una fuerza, R , de directriz desconocida aplicada en el punto de amarre, pues impide que este punto del sólido se mueva. A este punto, le quita sus dos grados de libertad en el plano, luego es una ligadura doble. Al sistema le quita dos grados de libertad.
- Superficie rugosa (no holónoma)
Las superficies rugosas pueden resistir una fuerza tangencial (llamada fuerza de rozamiento, R t) y una fuerza perpendicular a la superficie (llamada fuerza normal, Rn ) La fuerza resultante de esas dos, R , es una fuerza de directriz desconocida.
Aporta dos incógnitas al cálculo del equilibrado:
- El módulo de la fuerza, R, y su ángulo de orientación, , o bien
-Las dos componentes cartesianas, Rx y Ry
Ligadura triple
Su reacción es una fuerza de directriz desconocida aplicada en un punto conocido y un par
Un empotramiento ejerce sobre el cuerpo una fuerza R de directriz desconocida aplicada en un punto conocido y un par.
Empotramiento
M (^) par Mpark ˆ
Por tanto: Introducen tres incógnitas en el cálculo del equilibrado
Este tipo de ligaduras anulan tres grados de libertad del sistema. Por ello, son ligaduras triples.
La fuerza R suele representarse por sus dos componentes cartesianas (Rx,Ry)
El par se suele representar por su momento