¡Descarga Llibre SiS I y más Monografías, Ensayos en PDF de Ingeniería de Telecomunicaciones solo en Docsity!
Introducció als senyals i sistemes 11
1 Introducció als senyals i sistemes
Amb aquest tema s’inicia l’estudi pràctic dels senyals continus i deterministes i els sistemes analògics. Per començar, es repassen conceptes bàsics relacionats amb els senyals i les seves propietats. En general, es consideraran senyals d’una sola variable independent, representada pel temps. La transformació de la variable independent constitueix una operació clau per a la manipulació matemàtica de senyals i sistemes. Els primers exercicis i pràctiques d’aquest capítol es dediquen a aquesta operació. A continuació s’introdueixen els sistemes com les transformacions de senyals i s’estudien a través de les seves propietats. Com a cas particular es tenen en compte els sistemes lineals i invariants amb el temps, els quals modelen molts processos físics i es poden tractar fàcilment. Es caracteritzen completament per la resposta impulsional, que permet obtenir la sortida d’un sistema a través de la integral de convolució. Els diferents exercicis mostren com es pot dur a terme aquesta operació, amb mètodes purament matemàtics o amb mètodes semigràfics. Finalment, s’inclouen aplicacions de filtres diferents en el domini temporal.
Transformació de la variable independent
Les transformacions de la variable independent relacionen senyals que tenen la mateixa forma d’ona però que es diferencien per un desplaçament, una expansió, compressió o fins i tot un gir del senyal. Aquesta operació és essencial per a la interpretació i manipulació de senyals, especialment amb les relacionades amb els sistemes lineals i invariants. Les transformacions són les que es descriuen a continuació :
Desplaçament y ( t ) =x ( t-to )
si to > 0 el senyal es retarda en el temps si to < 0 el senyal s’avança
Escalat y ( t ) =x ( at )
si | a | < 1 el senyal s’expandeix si | a | > 1 el senyal es comprimeix si a < 0 el senyal a més d’expandir-se o comprimir-se es gira respecte a l’eix t = 0
12 Senyals i sistemes analògics
Reflexió y ( t ) =x ( -t )
és un cas particular de l’escalat quan a = -
Combinació de les anteriors y ( t ) =x ( at-ato )
per ∀ a i ∀ to
Definicions per a senyals
Un senyal és parell si compleix la condició:
x ( -t ) =x ( t )
Un senyal és imparell o senar si compleix la condició:
x ( -t ) =-x ( t )
La part parell d’un senyal x ( t ) qualsevol es defineix com:
Parell { x ( t )}=
x t +^ x − t
La part imparell d’un senyal x ( t ) qualsevol es defineix com:
Imparell { x ( t )}=
x t − x − t
Com a conseqüència, un senyal x ( t ) qualsevol es pot expressar com:
x t ( ) = Parell { x t ( ) } +Imparell{ x t ( )}
Els senyals periòdics compleixen:
x ( t ) =x ( t+nT )
on T s’anomena període fonamental i representa el menor valor positiu que compleix l’equació anterior. Si x ( t ) és constant, T és indefinit.
Energia per a un senyal x ( t ) :
| ( ) |^2
Ex x t dt
∞
−∞
14 Senyals i sistemes analògics
Pols rectangular
1 ( ) 1 2 0 resta
t t
Pols triangular
0 resta
t t t
Funció sinc
sin( ) sinc( )
t t t
π
π
-0.
0
1
-6 -4 -2 0 2 4 6
Senyal pols rectangular, Π (t)
0
1
-6 -4 -2 0 2 4 6
Senyal triangle, Λ(t)
-0.
-0.
0
1
-6 -4 -2 0 2 4 6
Senyal sinc(t)
Introducció als senyals i sistemes 15
Exponencial complex
est = e^ (^ σ+^ j^^2 π f^ ) t
La funció delta de Dirac o impuls unitari
Representa una de les funcions més importants en l’estudi de senyals i sistemes analògics. Admet dues possibles definicions:
Definició 1:
x t ( ) ( ) t dt x (0)
∞
−∞
∫ δ^ =
Definició 2: δ( ) t = 0 per t ≠ 0
( ) t dt 1
∞
−∞
∫δ^ =
Taula 1 Propietats de la funció delta
Escalat
( at ) ( ) t a
δ = δ
Simetria parell δ −(^ t^^ )^ = δ( ) t Producte per un senyal x t ( ) ( δ t − to ) = x t ( (^) o ) (δ t − to )
Representació d’un senyal x t ( )^^ x ( ) (^^ t^ )^ d^ x ( ) (^^ t d )
∞ ∞
−∞ −∞
Relació amb la funció graó 0
t u t d t d
+∞
−∞
( ) t [ u t ( )]
t
δ = ∂
Derivada n -èsima ( )^ [ ( )]^ ( 1)^ [ (0)]
n n n x (^) t n d (^) tn x
∞
−∞
τ δ τ τ = −
-0.
-0.
0
1
-0.4-6 -4 -2 0 2 4 6
-0.
0
1
-6 -4 -2 0 2 4 6
Senyal δ(t)
Introducció als senyals i sistemes 17
En el segon apartat el procés és a l’inrevés. Es dóna la transformació de la variable i l’usuari ha de representar el senyal corresponent a aquesta transformació. En aquest cas només es poden fer transformacions lineals de la variable. Així, partint del senyal original, l’usuari pot executar interactivament qualsevol de les transformacions t → t-b (opció desplaçar), t → at (opció escalar), t → -t (opció girar).
En qualsevol dels dos apartats com a ajuda addicional disposa de la possibilitat de visualitzar la funció de transformació realitzada. L’exemple següent pot aclarir aquest punt.
Fig. P1.1)
Exemple: Els senyals x ( t ) i y ( t ) de la figura estan relacionats mitjançant una transformació de variable. Així, y ( t ) = x (2 t ). Per tant, la transformació de variable (escalat) és la funció 2 t ( t → 2 t ). La funció de transformació és, per tant, una recta de pendent 2 que passa per l’origen (no hi ha desplaçament). Per tant, un punt t 1 del senyal y ( t ) ens el trobarem a 2 t 1 en el senyal x ( t ), o l’interval [0,3] en què y ( t )≠0 es transformará en el [0,6] sobre x ( t ). Això és el que es representa a la figura adjunta i és el que es veurà en visualitzar la funció de transformació.
- Per a l’exemple 5 de l’apartat 1 obtingueu la transformació correcta de la variable. Per això, visualitzeu la gràfica de la funció de transformació i obtingueu l’equació de la recta que s’ha de dibuixar en aquesta gràfica.
- Obtingueu la transformació correcta de la variable corresponent a l’exemple 1 de l’apartat 1.
- Obtingueu i compareu les transformacions de variable dels exemples 2 i 3 de l’apartat 1. Extraieu-ne conclusions.
- Visualitzeu la gràfica de la transformació de l’exemple 4 de l’apartat 1. Serà una transformació lineal? Intenteu obtenir la transformació correcta.
- Feu els exemples 1 a 4 de l’apartat 2. Compareu les operacions realitzades i extraieu-ne conclusions.
- Feu els exemples 3 i 4 de l’apartat 2 utilitzant un ordre de les operacions diferent del que heu fet servir a l’apartat anterior. Quina conclusió en podeu treure?
- Feu els exemples 5 i 6 de l’apartat 2. Compareu les operacions realitzades i extraieu-ne conclusions.
- Feu els exemples 5 i 6 de l’apartat 2 utilitzant un ordre de les operacions diferent del que heu fet servir a l’apartat anterior. Quina conclusió en podeu treure?
18 Senyals i sistemes analògics
I.4) Demostreu la igualtat dels funcionals δ( t ) i [ ( )]
d u t dt
I.5) Siguin x ( t ) i y ( t ) dos senyals periòdics amb períodes Tx i Ty respectivament. Determineu si el senyal z ( t ) = x ( t ) + y ( t ) és periòdic en els casos següents i, en cas afirmatiu, digueu quin és el període.
a) Tx =2 s , Ty =3 s b) Tx =0,7 s , Ty =0,94 s c) Tx = 2 s , Ty =2 s
Definició de sistema
Un sistema és un procés que transforma un senyal x ( t ) en un altre y ( t ).
x (t) (^) T[ ] y(t)= T[x(t)]
La transformació que realitzem sobre l’entrada es denota com a T [·].
Propietats dels sistemes
Linealitat
Un sistema és lineal si la sortida a una combinació lineal d’entrades equival a la combinació lineal de les sortides a cadascun dels senyals.
T a x [ 1 1 (^) ( ) t + a x 2 2 (^) ( ) t + ... + a xn n ( )] t = a T x 1 [ 1 (^) ( )] t + a T x 2 [ 2 ( )] t + ... + a T xn [ (^) n ( )] t
Invariància
Un sistema és invariant si en aplicar dos senyals que difereixen en un retard, les sortides difereixen únicament en el mateix retard. Un sistema invariant respon amb la mateixa forma d’ona independentment de l’instant en què s’aplica l’entrada.
La invariància es comprova de la manera següent:
si T [ x ( t )] = y ( t ) llavors T [ x ( t-t 0 )]= y ( t-t 0 )
20 Senyals i sistemes analògics
PROBLEMES I PRÀCTIQUES PROPOSATS
I.6) Completeu la taula següent de propietats per als sistemes proposats.
Sistema
Propietat
y ( t ) = k x ( t ) y ( t ) = x^2 ( t ) y ( t )= k
1 ( )
t x d
−∞
∫ τ^ τ y ( t ) = sin( x ( t ))^ y ( t ) =^ t^2 x ( t )
Linealitat no sí
Invariància sí no Causalitat sí no Estabilitat sí no
Amb memòria no sí Invertible sí no
I.7) Siguin dos sistemes T 1 i T 2 que fan les transformacions següents:
T 1 [ x ( t )] = x ( t - t 0 ) T 2 [ x ( t )] = x ( at )
a) Obtingueu l’expressió dels senyal de sortida dels sistemes:
T 3 [ x ( t )] = T 2 [ T 1 [ x ( t )]] T 4 [ x ( t )] = T 1 [ T 2 [ x ( t )]]
b) Si els dos sistemes es connecten en cascada, trobeu els valors de t 0 i a per obtenir a la sortida sinc(( t /2)-1) o sinc(( t -1)/2) quan a l’entrada s’aplica sinc( t ). Suposeu que l‘entrada s‘aplica primer a T 1 i la sortida obtinguda s’aplica a T 2.
c) Repetiu l’apartat anterior suposant que l’entrada s’aplica primer a T 2 i la sortida obtinguda s’aplica a T 1.
d) Compareu els resultats obtinguts als apartats b) i c) amb la solució de l‘apartat a).
I.8) Estudieu les propietats de linealitat i invariància dels sistemes següents:
a) T1 [ x ( t )] = x (2 t )
b) T2 [ x ( t )] = x ( t-T )
c) Comproveu i justifiqueu que si els dos sistemes es connecten en cascada, s’obté una sortida diferent depenent de l’ordre en què es fa la connexió: T1 { T2 [ x ( t )] } ≠ T2 { T1 [ x ( t )] }
d) Justifiqueu que dos sistemes lineals i invariants sempre són intercanviables.
Introducció als senyals i sistemes 21
Fig. I.9)
Quins són els valors correctes dels paràmetres a , to i reflexió
P1.2 Transformacions de la variable com a sistemes
El fet que dos senyals temporals estiguin relacionats a través d’una transformació de la variable t permet interpretar la transformació com un sistema. Així, en l’exemple descrit a P1.1 es pot entendre x ( t ) com entrada d’un sistema que fa l’escalat per un factor 2 i s’obté la sortida del sistema y ( t ). Llavors, per
realitzar una transformació lineal de la variable ( t → at-b ) necessitem un sistema que ens faci el desplaçament o retard i un altre que ens faci l’escalat (i un tercer si es considera separadament el gir o reflexió). En aquest exercici s’analitzarà la transformació de variable com una seqüència de sistemes.
- Seleccioneu com a Senyal la segona opció (senyal 2). Com a Configuració seleccioneu l’esquema 3. Obtingueu els paràmetres de cada sistema.
- Seleccioneu el senyal 3. Com a Configuració seleccioneu l’esquema 3. Obtingueu els paràmetres de cada sistema.
- Repetiu l’apartat anterior per la Configuració de l’esquema 1.
- Dels dos apartats anteriors, quin us ha estat més fàcil de resoldre?
- Dels apartats 2 i 3 analitzeu si l’escalat i el retard són intercanviables.
- Seleccioneu com a Senyal el senyal 4. Amb una figura anàloga a la tercera figura donada en l’exemple de P1.1, marqueu els intervals en què ambdós senyals són no nuls. Obtingueu i dibuixeu en el mateix gràfic l’equació de la recta que mapa un interval en l’altre (funció de transformació de la variable que relaciona x 4 ( t ) amb x 1 ( t )).
- A partir dels paràmetres de la transformació de variable de l’apartat anterior, quina configuració us resulta més fàcil de definir? Compareu la resposta amb la de l‘apartat 4.
Introducció als senyals i sistemes 23
I.12) Un sistema és invertible si diverses entrades donen lloc a diverses sortides. Si un sistema és invertible, es pot trobar un sistema invers tal que, inteconnexionat en cascada amb l’original, dóna lloc a una relació entrada-sortida igual a la del sistema identitat. Determineu si cadascun dels sistemes següents és invertible. Si ho són, construïu el sistema invers. Si no ho són, trobeu dos senyals d’entrada al sistema que generin la mateixa sortida.
a) y ( t ) = x ( t -4) c)^ y ( t ) =
t
−∞
∫ x (τ)^ d τ
b) y ( t ) = cos [ x ( t )] d) y ( t ) = x (2 t )
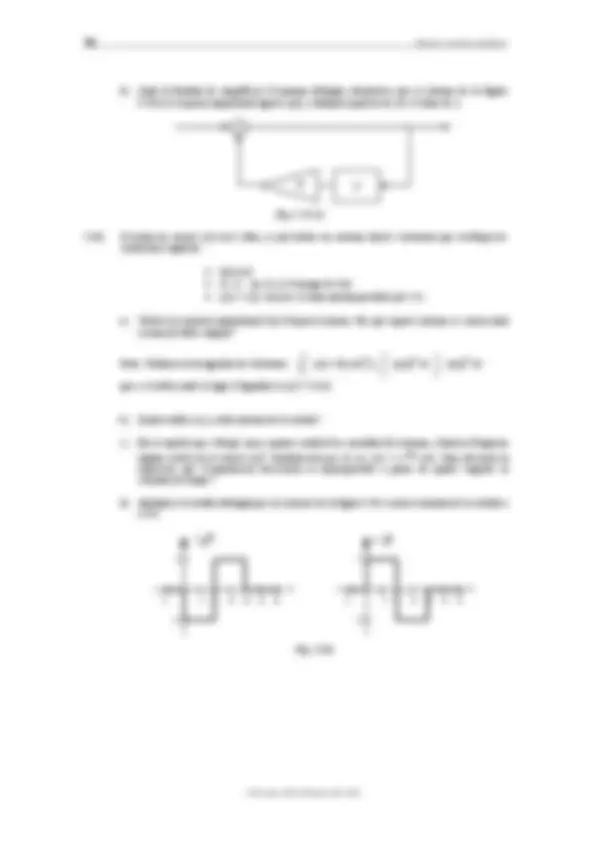
I.13) Tenim el sistema de la figura I.13a)
Retard to = 1 ( ) 2
( ) 2
x(t) x2 y(t)
Fig. I.13.a)
Es demana el següent:
a) Calculeu l’expressió de y ( t ). b) És un sistema lineal? c) És un sistema invariant? d) Busqueu el senyal de sortida per al senyal d’entrada x ( t ) de la figura I.13b)
x(t)
1 2
1
2
Fig. I.13.b)
P1.3 Propietats de sistemes
És possible analitzar les propietats d’un sistema sense necessitat de tenir-lo descrit. En aquest apartat es disposa d’un conjunt de senyals aplicables a l’entrada d’un sistema, i analitzant la sortida es poden deduir les propietats que verifica el sistema. Les propietats previstes per analitzar són la linealitat, la invariància, la causalitat i l’estabilitat.
- Seleccioneu la propietat de linealitat. Què cal comparar per verificar aquesta propietat?
- Seleccioneu el sistema 1. Analitzeu la linealitat d’aquest sistema aplicant diverses combinacions de senyals (no us oblideu d’escriure els coeficients).
- Analitzeu la linealitat per al sistema 2. Seleccioneu com a senyals el pols i l’exponencial unilateral. Repetiu-ho canviant el pols per la sinusoide. Què en deduïu?
24 Senyals i sistemes analògics
- Estudieu la propietat de linealitat per a la resta de sistemes.
- Hi ha algun sistema que no verifiqui la linealitat perquè T [ ax ( t )]≠ aT [ x ( t )]? (per eliminar el senyal 2, seleccioneu-ne un qualsevol i poseu-hi el coeficient a zero).
- Seleccioneu la propietat d’invariància. Quin procediment s’ha de seguir per analitzar-la? Seleccioneu el sistema 1 i un senyal qualsevol. Varieu T 0 amb el ratolí. Relacioneu el que veieu amb el procediment que heu proposat.
- Analitzeu la propietat d’invariància per als diferents sistemes.
- Observeu la sortida de cada sistema per la sinusoide. Hi ha alguna relació entre el que s’obté i la verificació o no de les propietats de linealitat i invariància de cada sistema?
- És possible analitzar la causalitat seleccionant el senyal aleatori? Quins senyals us semblen més adients per verificar aquesta propietat?
- Quins sistemes són causals?
- El compliment o no de les altres propietats té alguna incidència amb el procediment de verificació de la causalitat?
- Estudieu l’estabilitat dels sistemes.
- De totes les respostes sobre la verificació o no de les propietats, quines creieu que es poden afirmar amb absoluta seguretat? Justifiqueu la resposta.
- Seleccioneu la combinació de senyals Aleatori+20·Pols (seleccioneu la propietat de linealitat). Compareu les respostes obtingudes pels sistemes 1 i 2 per treure soroll al pols.
- Veient els senyals de sortida de cada sistema, intenteu inferir què fa cada sistema.
I.14) En aquest problema s’il·lustra una de les conseqüències més importants de les propietats de linealitat i invariància dels sistemes. Així, quan la resposta d’un sistema lineal o d’un sistema lineal i invariant a un senyal d’entrada determinat és coneguda, es poden obtenir fàcilment altres respostes corresponents a molts altres senyals d’entrada.
a) A la figura I.14a) es mostren x (^) 1 ( ) t i y (^) 1 ( ) t , que corresponen respectivament als senyals d’entrada i sortida d‘un sistema LI.
x (t)
t t
y (t) 1 1
1 1
2
1 2 1 2
Fig. I 14.a)
26 Senyals i sistemes analògics
Com que amb les dades de què disposem no és possible calcular correctament y ( t ), es demana una aproximació al senyal de sortida. Per fer-ho:
a) Aproximeu x ( t ) com a combinació de funcions pols triangular convenientment desplaçades. Dibuixeu el senyal obtingut.
b) Dibuixeu l‘aproximació obtinguda al senyal de sortida. Justifiqueu el procediment que heu seguit.
P1.4 Aplicació de linealitat i invariància d’un sistema
El fet que un sistema sigui lineal i invariant simplifica molt l’obtenció de la resposta del sistema. Així, si es pot descompondre un senyal d’entrada x ( t ) com a combinació lineal de versions desplaçades d’un senyal base f ( t ), és a dir:
( ) (^) i ( (^) i ) i
x t = ∑ a f t − t (P1.4.1)
només caldrà conèixer g ( t ), la resposta del sistema a f ( t ), ja que gràcies a les dues propietats esmentades es pot afirmar que la y ( t ), resposta del sistema a x ( t ), vindrà donada per
( ) { ( )} i ( i )
i
y t = T x t = ∑ a g t − t , on g ( t )= T [ f ( t )].
- Seleccioneu l’exemple 1. Veient la f ( t ) i g ( t ) d’aquest exemple, podem afirmar que el sistema és causal i estable? Quants paràmetres (coeficients i retards) necessitareu per descompondre el senyal x ( t ) donat, segons l’expressió (P1.4.1)? Escriviu aquests paràmetres. Per evitar complicacions de visualització és recomanable que primer escriviu el retard i després el coeficient.
- En el segon exemple, x ( t ) canvia respecte al primer exemple. Escriviu els nous paràmetres per a aquest cas. Seleccioneu l’exemple 3.
- Escriviu l’expressió analítica de x ( t ) i la de f ( t ). Escriviu x ( t ) en funció de f ( t ).
- Amb la relació existent entre x ( t ) i f ( t ) de l’apartat anterior, es pot calcular la sortida del sistema sense fer la descomposició de (P1.4.1)?
- Per a aquest exemple també és vàlida la descomposició de (P1.4.1). Obtingueu-ne els paràmetres.
- La descomposició anterior és única?
Introducció als senyals i sistemes 27
Definició de resposta impulsional per a sistemes lineals i invariants
La sortida d’un sistema lineal i invariant (LI) a la funció delta de Dirac es coneix com a resposta impulsional.
δ(t) T[δ(t)]= h (t) SLI
La resposta impulsional es pot utilitzar per obtenir la sortida a qualsevol senyal d'entrada a través del que es coneix com a integral de convolució:
y t ( ) x ( ) ( h t ) d
= (^) ∫ τ − τ τ −∞
Aquesta integral es sol abreujar de la manera següent:
y ( t ) =x ( t ) *h ( t )
Propietats de la convolució
Commutativa x ( t ) * h ( t ) = h ( t ) *x ( t )
Associativa x ( t ) * [ h 1 ( t ) *h 2 ( t )] = [ x ( t ) *h 1 ( t )] *h 2 ( t )
Distributiva x ( t ) * [ h 1 ( t ) +h 2 ( t )] =x ( t ) *h 1 ( t ) + x ( t ) *h 2 ( t )
Element neutre δ (t) x ( t ) * δ( t ) = x ( t )
Mètode semigràfic per resoldre la integral de convolució
Per a alguns senyals es més senzill obtenir la convolució a partir de la seva representació gràfica.
Els passos que cal seguir són els següents:
- S'expressen x ( t ) i h ( t ) en funció de τ.
- Per cada t : o El senyal h ( τ) es reflecteix i es desplaça t unitats per obtenir h ( t- τ) o Els senyals x ( τ) i h ( t- τ) es multipliquen per tot τ ( t és fix) o S'integra el producte anterior per -∞ < τ <∞
Aquesta forma d'obtenir la convolució és especialment útil quan els senyals x ( t ) i/o h ( t ) estan definits per intervals temporals. Llavors les operacions anteriors també es realitzen per intervals.
Introducció als senyals i sistemes 29
PROBLEMES I PRÀCTIQUES PROPOSATS
I.17) Si tenim l‘esquema de la figura I.17)
x
x(t) y(t)
cos wt
h(t)
Fig. I. 17)
a) Estudieu les propietats de linealitat i invariància del sistema global representat amb un traçat discontinu.
b) En el cas que sigui lineal, avalueu la resposta a l’impuls que caracteritza el sistema global: h (^) T ( t, τ) = T [δ( t- τ)].
c) Si x ( t ) = e −^ atu ( t ) i h ( t ) = e −^ btu ( t ), trobeu y ( t ).
d) Raoneu si dos sistemes diferents, però amb la mateixa estructura que la del problema, connectats en cascada, són intercanviables. Utilitzeu, per exemple, el primer sistema amb w = w 1 i h ( t ) = δ( t-t 1 ), i el segon sistema amb w = w 2 i h ( t ) = δ( t-t 2 ), per simplificar.
I. 18) Considereu el sistema lineal definit per l’equació
y ( t ) =
t
t − T
∫ x (τ)^ d τ
a) Calculeu la sortida y (^) i ( t ) per a les següents x (^) i ( t ):
x (^) 1 ( ) t =
t o
o / 2 o
t t t
; x (^) 2 ( ) t =
t o
exp ( -t/to ) u ( t ) amb T > to
b) Comproveu que y (^) 1 ( ) t = y (^) 2 ( ) t quan to tendeix a zero
c) Calculeu la resposta impulsional del sistema.
30 Senyals i sistemes analògics
P1.5 Aproximació a la funció delta i resposta impulsional de sistemes
Una definició matemàtica, però a la vegada molt física, de la funció delta ve donada com a límit de famílies de funcions. En aquesta pràctica s’utilitzen quatre famílies de funcions que reduint-les en duració es comporten com la delta. Aquestes funcions són:
( ) , ( ) , , sinc( )
t t t e t
− Π Λ
Suposem el cas del pols rectangular. Si seleccionem un sistema veurem inicialment la resposta del sistema a Π ( / t a ) per a a =1. Amb el ratolí es pot variar la duració del senyal d’entrada, és a dir, el
paràmetre a. Si el sistema seleccionat és lineal i invariant, veurem que quan a es fa molt petit succeeixen dues coses. D’una banda, el senyal de sortida se’n va cap a zero, la qual cosa és lògica tenint en compte que l‘àrea del senyal d’entrada també va cap a zero. D’altra banda, es pot observar que la forma d’ona del senyal de sortida varia cada cop menys.
Això ho podem repetir amb els altres senyals i es podrà observar que per valors de duració suficientment petits les respostes que observem cada cop s’assemblen més. Per poder-ho observar millor, un cop ha disminuït la duració del senyal d’entrada seleccionat podrem establir la comparació de resultats amb els altres senyals si fem clic a Comparar.
Per evitar la tendència cap a zero de la sortida en disminuir la duració de l’entrada, es normalitza cada senyal per mantenir l‘àrea constant (feu clic a Àrea constant ). Ara, òbviament, en disminuir la duració de l’entrada augmentarà l’amplitud, però d’aquesta manera la sortida cada cop tendeix més cap a un senyal determinat independentment de l’entrada escollida. És la resposta impulsional.
Amb aquest experiment es pot deduir que a la pràctica podem obtenir una molt bona aproximació de resposta impulsional d’un sistema lineal invariant sense preocupar-nos massa del tipus d’excitació, sempre que la seva duració sigui petita i l’àrea es mantingui a 1. Òbviament, aquesta independència de la sortida amb l’entrada només passa si el sistema és lineal i invariant.
- Es pot afirmar per qualsevol dels sistemes que la sortida depèn clarament de l’entrada?
- Varieu la duració dels senyals i respongueu novament a la pregunta anterior.
- Seleccioneu el sistema 1. Verifiqueu l’afirmació següent: si es varia una mica l’escalat del senyal d’entrada s’obté el mateix senyal de sortida però reescalat amb el mateix factor que l’entrada.
- Pel sistema 1 augmenteu el factor d’escala, és a dir, reduïu la duració del senyal d’entrada, i analitzeu què succeeix tant des del punt de vista de l’amplitud com des del punt de vista de l’afirmació de l’apartat anterior.
- Què succeeix quan seleccioneu Àrea constant? Per què?
- Què passa si seleccioneu el sistema 3? Per què?
- Pot donar l’expressió de la resposta impulsional de cadascun dels sistemes?
- Seleccioneu el sistema 1 i analitzeu la realització pràctica de la funció δ( t ). Creieu que és important que δ( t )=0 per a t =0 +?