¡Descarga Modelado de un péndulo invertido y más Ejercicios en PDF de Sistemas de Control solo en Docsity!
Índice
ESCUELA SUPERIOR DE INGENIEROS
UNIVERSIDAD DE SEVILLA
DEPARTAMENTO DE MATEMÁTICA APLICADA II
ESTUDIO DE LA
ESTABILIDAD DEL
PÉNDULO ELÁSTICO
INVERTIDO
PROYECTO FIN DE CARRERA. DICIEMBRE 2007
Autor: Félix Sanz Rodríguez
Director: Emilio Freire Macías
AGRADECIMIENTOS
En primer lugar debo agradecer al Profesor Emilio Freire Macías su colaboración y disposición a la hora de realizar este proyecto, quien a pesar de tener un año especialmente complicado no tuvo reparos a la hora de aceptarme como alumno suyo, ayudándome en todo momento con un trato cercano y vocación docente.
También debo expresar mi gratitud a mi familia sin la cual este proyecto no sería posible, dándome su apoyo en todo momento y de la cual no puedo más que sentirme orgulloso. En especial quiero dedicar este proyecto a mi hermano Don Federico al cual considero el mejor ingeniero en cuanto a ingenio se refiere.
Por último quiero expresar mi gratitud a mi novia Pilu quien con su alegría me ha hecho este camino más fácil y de la cual he obtenido la motivación necesaria para seguir trabajando en los momentos difíciles
- Capítulo 1: Introducción
- 1.1.- Antecedentes históricos………………………………….………………….……..
- 1.2.- Definición del sistema…………………………………………….……………….
- 1.2.1.- Modelado…………………………………………………….…………….
- 1.2.2.- Descripción del sistema………….……………………………………….
- 1.2.3.- Hipótesis de modelado……………………………………………………
- 1.2.4.- Objetivos del proyecto……………………………………………………
- Capítulo 2: Ecuaciones de movimiento del sistema
- 2.1.- Ecuaciones de Lagrange………………………………………...………………..
- 2.2.- Obtención de las ecuaciones generales del sistema………………………………
- 2.3.- Adimensionalización……………………………………………………………...
- Capítulo 3: Estudio analítico del modelo
- 3.1.- Solución canónica: obtención de la solución semitrivial………………………...
- 3.2.- Modelo linealizado……………………………………………………………….
- Capítulo 4: Análisis numérico del sistema
- 4.1.- Introducción al análisis numérico………………………………….…….……..
- 4.1.1.- Aplicaciones………………………………………….……….……
- 4.1.2.- Integración numérica………………………………..……….……..
- 4.2.- Bases matemáticas de la integración numérica…………………..…….....…….
- 4.3.- Integración numérica de la ecuación………………………………..…….…….
- 4.3.1.- Adaptación de la ecuación para trabajar en MATLAB……...……..
- 4.3.2.- Funciones empleadas…………………………….…………..……..
- 4.4.- Determinación de las regiones de estabilidad……….…………………….……
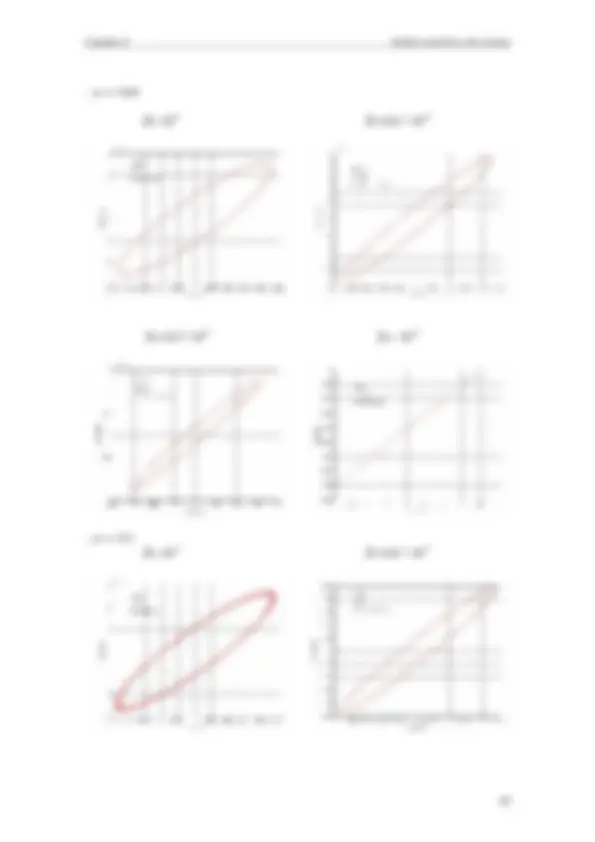
- 4.4.1.- Región de estabilidad para μ = 3……………….……….…...…….
- 4.4.2.- Región de estabilidad para μ = 2………………….………...……..
- 4.4.3.- Región de estabilidad para μ = 1.2………………….……..………
- 4.4.4.- Región de estabilidad para μ = 1.1…………………….….……….
- 4.4.5.- Región de estabilidad para μ = 1.08…………………….…………
- 4.4.6.- Región de estabilidad para μ = 1.05……………………………….
- 4.4.7.- Región de estabilidad para μ = 1.03………………………………..
- Capítulo 5: Análisis de los resultados obtenidos
- 5.1.- Condiciones iniciales……………………………………………………………
- 5.2.- Influencia de los parámetros…………………………………………………….
- 5.2.1.- Influencia del parámetro a …………………………………………
- 5.2.2.- Influencia del parámetro λ …………………………………………
- 5.2.3.- Influencia del parámetro μ …………………………...…………….
- Capítulo 6: Conclusiones
Capítulo 1 Introducción
Posteriormente, en 1860, Cavalleri dispuso seis péndulos de diferentes frecuencias naturales para poder estudiar el contenido en frecuencias de las ondas del terremoto, de tal forma que la frecuencia dominante del mismo hiciera entrar en resonancia a aquel péndulo cuya frecuencia natural se aproximara más a este valor.
Sin embargo fue en 1908 cuando Andrew Stephenson, profesor de Matemáticas de la Universidad de Manchester, consiguió estabilizar un péndulo rígido en su posición invertida por medio una vibración introducida en el punto de sujeción. Así pues, suponiendo por simplicidad que toda la masa se encuentra concentrada en el extremo de la varilla rígida, Stephenson demostró que para amplitudes de vibración pequeñas comparadas con la longitud del péndulo, el sistema presenta estabilidad en su posición invertida si la frecuencia de excitación cumple la relación:
a
2 gl
Siendo a la amplitud de la vibración vertical introducida y l la longitud del péndulo. Estudios posteriores mostraron la posibilidad de poder estabilizar el sistema con menores frecuencias de excitación y mayores amplitudes, obteniendo unas regiones de estabilidad en función de los valores de los parámetros asociados al sistema físico en cuestión y a la vibración introducida. En 1951 esta estabilidad fue explicada al detalle por Pjotr Kapitza conociéndose desde entonces este dispositivo como “péndulo de Kapitza”.
Los resultados obtenidos para el péndulo invertido propuesto por Stephenson fueron generalizados por David Acheson en 1993 para un número finito de péndulos unidos unos a otros. En este caso tenemos N péndulos conectados entre sí bajo la acción de la gravedad y estando unidos a un pivote. Si llamamos ωmin la menor de las frecuencias naturales del sistema y ωmax a la mayor de ellas, se supone que ω^2 max es mucho mayor que ω^2 min. De este modo, el sistema completo puede ser estabilizado en su posición invertida mediante la acción de una vibración vertical de amplitud a y frecuencia ω tales que:
max
2
ω
g
a <
a g
min
ω
ω >
De esta forma Acheson define una región de estabilidad correspondiente al conjunto de valores que deben cumplir los parámetros del sistema para que el conjunto completo presente una posición de equilibrio estable en su posición invertida.
Capítulo 1 Introducción
1.2.- Definición del sistema
1.2.1.- Modelado
En el presente proyecto vamos a analizar el comportamiento de un sistema mecánico sometido a vibración con el fin de estudiar la estabilidad del mismo.
Como sistema mecánico entendemos un conjunto de cuerpos que varían su posición ante la acción de una serie de fuerzas. Dentro de la mecánica del sólido rígido se emplean las variables asociadas a la posición del sistema para describir el movimiento del mismo. Al conjunto mínimo de variables necesarias para tal fin se denominan grados de libertad del sistema y su conocimiento en función del tiempo conlleva el conocimiento exacto del movimiento del sistema. En concreto se denominan grado de libertad a cada variable correspondiente a cada movimiento independiente que puede experimentar el sólido. Por tanto un sólido rígido puede tener como máximo seis grados de libertad, tres traslaciones y tres rotaciones, siendo este número menor en función de las restricciones, denominadas también ligaduras, que impongamos a su movimiento. En el caso concreto de una masa puntual cuyo movimiento se restringe a un plano tan solo posee dos grados de libertad.
Para estudiar el comportamiento de un sistema acudimos a un modelo del mismo que no es más que una representación aproximada del sistema real. A la hora de realizar dicho estudio podemos acudir a una reproducción a escala del mismo (modelado a escala) o bien caracterizarlo en forma de expresiones matemáticas (modelo matemático), siendo esta segunda opción la que abordamos en el presente proyecto.
Por lo tanto el modelo de un sistema consiste en un conjunto de expresiones matemáticas que representan la evolución temporal de las magnitudes asociadas al sistema en cuestión. El modelo estará bien planteado cuando el número de ecuaciones independientes obtenidas coincida con el número de grados de libertad del mismo. Por otra parte, en un modelo también están implicados los parámetros del mismo. Éstos son aquellas magnitudes inherentes al sistema que lo diferencian de otro semejante a él. En concreto, nuestro sistema esta dentro del conjunto denominado sistemas mecánicos paramétricos. En este caso el término parametrico corresponde a aquellos casos en los que una acción externa puede provocar una variación en el tiempo de algunos de los parámetros del sistema. Estos cambios en los parámetros del sistema pueden provocar a su vez grandes respuestas del mismo y conducirlo incluso a la inestabilidad. Los resultados obtenidos al analizar las ecuaciones paramétricas muestran cómo un sistema puede ser estable o inestable según la frecuencia de excitación, la amplitud, masa… es decir, según el valor de los parámetros que tengamos. Es bien conocido que cuando excitamos un sistema con una frecuencia cercana a la frecuencia natural del mismo la respuesta se ve amplificada considerablemente, fenómeno conocido como resonancia. Pero existen sistemas integrados a su vez por distintos subsistemas en los cuales una parte del mismo puede excitar e la otra a frecuencias cercanas a su frecuencia natural produciendo el mismo efecto anterior y conduciendo a la inestabilidad del mismo. Generalmente estos sistemas están integrados por dos subsistemas. El primero de ellos, denominado primario, que puede tener desde un solo grado de libertad hasta N grados de libertad, puede ser forzado externamente, autoexcitado, sometido a vibración paramétrica, y en general estará vibrando. El
Capítulo 1 Introducción
Por lo tanto el fenómeno de resonancia paramétrica por el cual se pierde la estabilidad de la solución semitrivial es un efecto indeseable y que deberemos evitar. Por último comentar que este fenómeno depende de la relación entre las frecuencias de vibración de los componentes del sistema y de la unión entre los sistemas primario y secundario. Existen algunos casos en que un sistema mecánico que se encuentra excitado mediante vibración podemos convertirlo en un sistema paramétrico con el fin de que el subsistema secundario que añadimos funcione como absorbedor. Esto se consigue por ejemplo con la adición de un péndulo que absorba energía del sistema y reduzca por tanto la vibración del sistema completo.
Un hecho importante a tener en cuenta es que para obtener dicho modelo se realizan una serie de hipótesis simplificadoras con el fin de poder abordar el problema de una manera más sencilla de lo que ocurre en la realidad. A este proceso es a lo que denominamos modelado de un sistema y hay que hacer notar que el grado de aproximación de nuestro modelo respecto del real dependerá de lo que nos ajustemos a las hipótesis realizadas en la obtención del mismo. Por lo tanto hay que tener en cuenta que un modelo esta sujeto a errores y puede no representar fielmente el comportamiento de un sistema por lo que siempre tendrá asociado un grado de exactitud en función de la aplicación que hagamos de él. De este modo pueden existir dos prioridades a la hora de modelar un problema concreto según el grado de exactitud que busquemos; por un lado puede ser interesante para el análisis del comportamiento de un sistema un modelo simplificado de él que nos permita visualizar características importantes del mismo, mientras que por otra parte puede ser mas interesante obtener un modelo mas exacto con el que reproducir fielmente el comportamiento del sistema aunque ello conlleve un modelo bastante mas complejo. Esta segunda opción es la empleada en la simulación de sistemas mientras que la primera corresponde al análisis de sistemas.
Capítulo 1 Introducción
1.2.2.- Descripción del sistema
El sistema mecánico objeto de nuestro estudio consiste en una masa unida a un resorte, estando sujeto en su otro extremo a un punto fijo. La realización de dicho experimento podría llevarse acabo mediante una varilla sujeta a un punto fijo sobre la que se monta el resorte unido a la masa, pudiendo ésta deslizar libremente a lo largo de la varilla. Un sistema así dispuesto presenta dos grados de libertad en el plano, pudiendo escogerse entre las dos componentes cartesianas (x, y) o las coordenadas polares (r,θ). Por lo tanto las variables de nuestro problema consisten en los grados de libertad asociados a la posición de la masa que supondremos puntual y de valor m. En el espacio, un sistema así planteado posee tres grados de libertad pero hemos impuesto una restricción más al obligar al sistema a mantenerse en el plano, lo que corresponde a establecer una ecuación de ligadura correspondiente a z =0, lo que resta un grado de libertad. Esto podría llevarse acabo fácilmente, por ejemplo, fabricando la varilla con un apoyo tipo T restringiendo así uno de los giros.
Hay que observar que el hecho de unir la masa puntual a un muelle no restringe movimiento alguno por lo que no resta grados de libertad, tan solo influye en el hecho de someter a la masa a una fuerza función de la elongación del mismo respecto de su longitud natural lo.
Este sistema así dispuesto, posee una posición de equilibrio inestable en posición vertical y por lo tanto cualquier pequeña perturbación de esta posición provocará que el sistema abandone su posición de reposo vertical para no recuperarla ya más. Por otro lado, este sistema así planteado es simplemente el sistema correspondiente a un péndulo elástico que vimos anteriormente y que planteaba fenómenos de inestabilidad según el valor de vibración del muelle respecto de la del péndulo en sí.
A diferencia del péndulo elástico ahora sometemos a nuestro sistema a una vibración vertical en el punto de sujeción de expresión Asen (ωt) donde ya vemos dos parámetros que serán determinantes en la estabilidad del sistema, a saber, la amplitud de vibración A, y la frecuencia de excitación ω. Por lo tanto este sistema esta sometido a dos fuerzas que derivan de potencial correspondientes a la gravedad y a la acción del muelle, y por otro lado lo sometemos a vibración en la base. Así nuestro sistema paramétrico consiste en un sistema primario formado por la base, que se encuentra sometido a vibración, y otro, sistema secundario, formado por la masa, que supondremos puntual, y que se encuentra unido al primario mediante un muelle.
Capítulo 1 Introducción
1.2.3.- Hipótesis de modelado
Para la obtención de nuestro modelo vamos a realizar una serie de hipótesis simplificadoras con el fin de obtener un modelo sencillo que nos permita estudiar el comportamiento del sistema teniendo en cuenta los aspectos más significativos del mismo. Luego realizaremos otras mas avanzadas con el fin de esclarecer el comportamiento del sistema en unas situaciones más concretas.
Así pues en un primer momento vamos a suponer en nuestro modelo:
- Masa puntual de valor m. Esta hipótesis será correcta siempre y cuando la masa del resorte y la varilla (en caso de realizar esta disposición) sean despreciables respecto a la masa puntual (al menos un orden menor).
- No existe rozamiento con el aire. Despreciamos completamente el rozamiento del aire sobre cualquiera de los elementos del sistema.
- No existe rozamiento en el giro en torno al punto de sujeción. No tendremos en cuenta el posible efecto de un rozamiento en la articulación.
- Movimiento en el plano vertical. Supondremos un movimiento en el plano sin ningún tipo de efecto en cualquier dirección no contenida en él.
- El comportamiento del muelle viene regido por la Ley de Hooke.
- En general no se tendrá en cuenta ningún efecto disipativo de energía como pudieran ser las fuerzas de rozamiento antes señalas ni en el muelle por calentamiento. Por lo tanto tenemos un sistema al que se le está suministrando energía a través de la vibración de la base y que será empleada tan solo en forma de trabajo por desplazamiento de la masa.
Capítulo 1 Introducción
1.2.4.- Objetivos del proyecto
El objetivo fundamental de este proyecto es analizar la estabilidad del sistema antes descrito en función de los parámetros que lo definen y la excitación en forma de vibración a la que lo sometemos a través de la amplitud y la frecuencia. Para ello vamos a realizar en primer lugar un modelo del mismo en función de una serie de hipótesis de partida, para luego analizar el mismo y estudiando la combinación de los valores de los parámetros que hacen que el sistema presente estabilidad o inestabilidad. De esta forma podremos hallar las regiones de estabilidad que se nos presentan, para así predecir el comportamiento del sistema real frente a unos valores concretos de los parámetros. También veremos cómo influyen cada uno de estos parámetros en el comportamiento del sistema, la sensibilidad que presenta el movimiento frente a una variación de alguno de ellos, y cómo influyen en la estabilidad.
Capítulo 2 Ecuaciones de movimiento del sistema
2.1.- Ecuaciones de Lagrange
En Mecánica Racional las ecuaciones de Lagrange constituyen un método directo para la obtención de las ecuaciones de movimiento de un sistema. Su expresión general es de la forma:
Q i n
q
T
q
T
dt
d
i i i
Donde las variables qi representan las variables independientes del problema que son los grados de libertad del sistema. Por lo tanto tenemos tantas ecuaciones como variables independientes, por lo que el modelo que nos proporciona estará bien planteado. Por otra parte T representa la energía cinética total del sistema y su expresión vendrá dada en función de los grados de libertad q (^) i, también denominados coordenadas generalizadas del problema. Por último Qi representa las fuerzas generalizadas en las que participan tan sólo las fuerzas activas del problema.
Este sistema nos proporciona un sistema de ecuaciones diferenciales que son exactamente las ecuaciones de movimiento de nuestro sistema, y que por tanto, de resolverlo, obtendríamos las expresiones de q (^) i en función del tiempo y el movimiento del sistema quedaría perfectamente definido. En el caso de que existan fuerzas que derivan de potencial, las ecuaciones de Lagrange se pueden modificar de la siguiente forma:
Q i n
q
V
q
T
q
T
dt
d
i i i i
Donde V es la energía potencial del sistema. Dado que la energía potencial no depende de las velocidades generalizadas, operando obtenemos:
( ) ( )
Q i n
q
T V
q
T V
dt
d
i i i
Capítulo 2 Ecuaciones de movimiento del sistema
Quedando:
Q i^ n
q
L
q
L
dt
d
i i i
Donde L es la función Lagrangiana del problema, diferencia de la energía cinética y potencial del sistema. En el caso de que todas las fuerzas que actúan sobre el sistema deriven de potencial las ecuaciones de Lagrange toman su expresión más sencilla:
i n
q
L
q
L
dt
d
i i
Capítulo 2 Ecuaciones de movimiento del sistema
En esta situación tenemos que todas las fuerzas que actúan sobre nuestro sistema son conservativas y por lo tanto derivan de potencial. Estas fuerzas son la acción de la gravedad y la fuerza que ejerce el muelle sobre la masa. Por lo tanto las ecuaciones de Lagrange en este caso toman la expresión general:
i n
q
L
q
L
dt
d
i i
Como puede observarse en la figura nuestro sistema tiene dos grados de libertad de los que hemos tomado el ángulo respecto a la vertical y la distancia al origen: (l, θ ) Por lo tanto la expresión de las ecuaciones de Lagrange aplicadas en este caso toman la forma siguiente:
θ θ
L L
dt
d
( I )
l^ l
L L
dt
d
( II )
Pasamos ahora a calcular la Lagrangiana de nuestro problema. Su expresión es:
L = T – V
Como ya se vio antes los términos T y V representan la energía cinética y potencial del sistema y que a continuación pasamos a calcular.
La energía cinética total de nuestro sistema tiene la siguiente expresión en coordenadas cartesianas:
= = ⎛^ +
2 •^2 • 2
T mv m x y
Capítulo 2 Ecuaciones de movimiento del sistema
Poniendo estas variables en función de las coordenadas generalizadas de nuestro problema tenemos:
x =l sen ( )θ
y = lcos ( ) θ + Asen ( ω t )
donde observamos el efecto de la vibración en dirección vertical. De esta expresión hallamos la velocidad en función de los grados de libertad que hemos escogido.
( ) ( )
y = cos ( ) θ − sen ( )θ θ + A ωcos( ω t )
l l
Sustituyendo esta expresión en la de la energía cinética obtenemos:
( ( )) ( ) ( ) ( )
= + + + ⎡^ −
- • • • T m l (^) lθ A ωcosω t 2 A ωcosω t cosθ l l sen θ θ
donde ya tenemos expresada la energía cinética en función de nuestras coordenadas generalizadas, los grados de libertad ( l, θ )
Las fuerzas que actúan sobre la masa son la fuerza de la gravedad y la fuerza del muelle, ambas conservativas y por lo tanto derivan de potencial. Estas fuerzas tienen la forma:
Gravedad: F g = mg
Muelle: F (^) m =− K ( l −l o ) r / r