



Problema de Kepler por ecuaciones regulares
Mecánica Orbital y Dinámica de Actitud
Rafael Ramis
Departamento de Física Aplicada a la Ingenieria Aeronáutica
Universidad Politécnica de Madrid
Curso 2011/2012
R. Ramis Ecuaciones regulares


Prepara tus exámenes y mejora tus resultados gracias a la gran cantidad de recursos disponibles en Docsity

Gana puntos ayudando a otros estudiantes o consíguelos activando un Plan Premium

Prepara tus exámenes
Prepara tus exámenes y mejora tus resultados gracias a la gran cantidad de recursos disponibles en Docsity
Prepara tus exámenes con los documentos que comparten otros estudiantes como tú en Docsity
Encuentra los documentos específicos para los exámenes de tu universidad
Estudia con lecciones y exámenes resueltos basados en los programas académicos de las mejores universidades
Responde a preguntas de exámenes reales y pon a prueba tu preparación
Consigue puntos base para descargar
Gana puntos ayudando a otros estudiantes o consíguelos activando un Plan Premium
Comunidad
Pide ayuda a la comunidad y resuelve tus dudas de estudio
Ebooks gratuitos
Descarga nuestras guías gratuitas sobre técnicas de estudio, métodos para controlar la ansiedad y consejos para la tesis preparadas por los tutores de Docsity
Asignatura: Mecanica Orbital, Profesor: , Carrera: Ingeniería Aeronáutica, Universidad: UPM
Tipo: Apuntes
1 / 28

Esta página no es visible en la vista previa
¡No te pierdas las partes importantes!
Departamento de Física Aplicada a la Ingenieria Aeronáutica
Universidad Politécnica de Madrid
EDO lineal de segundo orden y coeficientes constantes
Problema:
Ecuación para y(x) en la que α y c son constantes
d
2
y
dx
2
Condiciones iniciales
y| x= 0
= y 0
dy
dx
x= 0
= y
′
0
La solución de este problema depende del signo de α (positivo, nulo o
negativo).
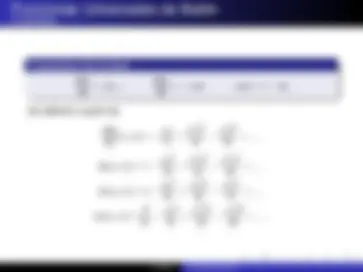
Propiedades
Propiedades elementales
dU n
dx
n− 1
dU
0
dx
= −αU 1
αU 2
0
Se obtienen a partir de
dU 0
dx
(α, x) = −
αx
α
2
x
3
α
3
x
5
0
(α, x) = 1 −
αx
2
α
2
x
4
α
3
x
6
1
(α, x) = x −
αx
3
α
2
x
5
α
3
x
7
2
(α, x) =
x
2
αx
4
α
2
x
6
α
3
x
8
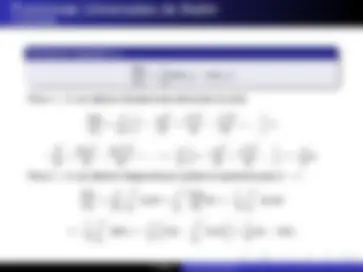
Propiedades
Derivacion respecto a α
n
∂α
(nU n+ 2
− xU n+ 1
Para n = 0, se obtiene directamente derivando la serie.
0
∂α
∂α
αx
2
α
2
x
4
α
3
x
6
x
2
2 αx
4
3 α
2
x
6
x
x −
αx
3
α
2
x
5
x
1
Para n > 0, se obtiene integrando por partes la expresión para n − 1.
1
∂α
∂α
x
0
0
dx =
x
0
0
∂α
dx = −
x
0
xU 1
dx
x
0
xdU 2
xU 2
x
0
2
dx
3
− xU 2
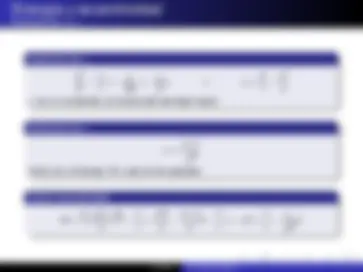
Evaluación numérica
En las aplicaciones conviene calcular en bloque todas las funciones
universales, hasta un determinado orden, mediante desarrollos en serie
de potencias.
Si α > 0 las funciones son periódicas. Para evitar grandes errores de
redondeo se las puede evaluar en el intervalo −π ≤
αx ≤ π.
Usar directamente funciones trigonométricas puede dar lugar a serios
problemas de redondeo. Por ejemplo si α = 10
− 6
y x = 1
2
x
2
αx
4
2
1 − cos
αx
α
Si α = 10
− 10
resulta U 2
Definición de α y σ
Definición de α
v
2
μ
r
μ
2 a
μ
α ⇒ α =
r
v
2
μ
α es un constante, la inversa del semieje mayor.
Definición de σ
σ =
v ·
r
μ
Varía con el tiempo. En nula en los apsides.
Vector excentricidad
e =
~v ∧ (~r ∧ ~v )
μ
~r
r
v
2
~r
μ
~v · ~r
μ
v −
~r
r
= −α~r +
~r
r
σ
μ
v
Ecuaciones para la distancia r
Ecuaciones regulares para r
dr
dχ
= σ
d
2
r
dχ
2
= 1 − αr
¡lineales de coeficientes constantes!
Se obtienen a partir de:
r
dr
dχ
r ·
d
r
dχ
r
μ
r ·
d
r
dt
= r σ
d
2
r
dχ
2
dσ
dχ
r
μ
d(
r ·
v )
dt
r
μ
(v
2
r ·
v ) =
rv
2
μ
− 1 = 1 − αr
En donde se ha usado:
d
dχ
r
μ
d
dt
v = −
μ
r
3
r α =
r
v
2
μ
Ecuaciones para el vector de posición ~r
Ecuaciones regulares para
r
d
r
dχ
r
μ
v
d
2
r
dχ
2
e − α~r
¡lineales de coeficientes constantes!
Se obtienen a partir de:
d
r
dχ
r
μ
d
r
dt
r
μ
v
d
2
r
dχ
2
dr
dχ
v
μ
r
μ
d
v
dχ
σ~v
μ
r
2
μ
d
v
dt
σ~v
μ
r
r
e − α~r
En donde se ha usado:
d
dχ
r
μ
d
dt
dr
dχ
= σ
v = −
μ
r
3
r
e = −α~r +
r
r
σ
μ
v
Posición y velocidad
Ecuaciones regulares
r
t 0
r 0
d~r
dχ
t 0
r
0
μ
v 0
d
2
~r
dχ
2
e − α~r
Posición
r =
r 0
0
r 0
v 0
μ
1
eU 2
2
r 0
r 0
r 0
1
2
μ
v 0
Se ha empleado la definición de
~ e y la relación αU
2
= 1 − U
0
Velocidad
v =
μ
r
d
r
dχ
μU 1
r 0
r
r 0
2
r
v 0
Se ha empleado la expresión obtenida anteriormente para r
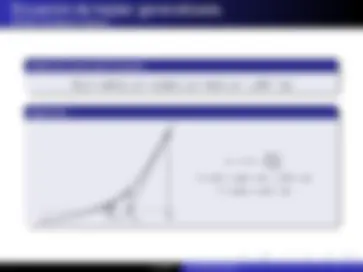
Método de Newton-Rapson
Hallar los ceros de la función:
f (χ) = r
0
1
(α, χ) + σ
0
2
(α, χ) + U
3
(α, χ) −
μ(t − t
0
Algoritmo:
X
X X
i i+
i+
x i+ 1
= x i
−
f (x i
)
f
′
(x i
)
f = r 0
U 1
U 2
−
√
μ(t − t 0
)
f
′
= r 0
U 0
U 1
Raices “atrapadas entre corchetes” (bracketed)
f (x a
) < 0 y f (x b
) > 0 ⇒ x a
< x < x b
b
a
Si α > 0, la órbita es periódica (T = 2 π/μ
1 / 2
α
3 / 2
). Podemos restar un
cierto numero de periodos hasta lograr t − t
0
< T y 0 < χ ≤ 2 π/α
1 / 2
Una estimación de la solución es χ ' μ
1 / 2
(t − t
0
)/r
0
Si la órbita es abierta duplicariamos este valor hasta que f (χ) > 0
Método de la bisección
Algoritmo
n
n+
b
a
c
while(1){
x=(ax+xb)/2;
y=f(x);
if(fabs(y)<eps)
return(x);
else
if(y<0)
xa=x;
else
xb=x;
¿es completamente seguro?
Método de Ridders
Dados dos valores (x a
, y a
) y (x b
, y b
n
n+
b
x
a
x x
c
∆x
∆x
x
d
1 x c
=
1
2
(x a
b
)
2 y c
= f (x c
)
3
Suponer y(x) = (Ax + B)e
Cx
4 Determinar A, B y C a partir de
los valores en los tres puntos
5
Hallar x
d
y y
d
= y(x
d
)
6 Reducir el intervalo
∆x n+ 1
<
1
2
∆x n
7
Parar como en el caso de la
bisección.
Método de Van Wijngaarden, Decker y Brent
Dados tres valores (x a
, y a
), (x b
, y b
) y (x c
, y c
n+
n
x c
d
x
x a
x
∆x
x
b
1 Suponer x(y) = Ay
2
2
Determinar A, B y C a partir de
los valores en los tres puntos
3 Hallar x
d
y y
d
= y(x
d
) (si se
puede)
4 Reducir el intervalo eliminando
(x a
, y a
) o (x b
, y b
).
5 Parar como en el caso de la
bisección.
Si en el paso 3, x d
cae fuera del intervalo o si tras el punto 4, la reducción de
∆x es demasiado pequeña, se intercala un paso de bisección.