¡Descarga Problema de Kepler y más Ejercicios en PDF de Ingeniería Aeronáutica solo en Docsity!
Orbital Dynamics and Attitude Control
Dr. Rafael Ramis Abril
EuMAS- European Masters Course in Aeronautics and Space Technology
Departamento de Física Aplicada a la Ingeniería Aeronáutica Universidad Politécnica de Madrid
OCTOBER 2007
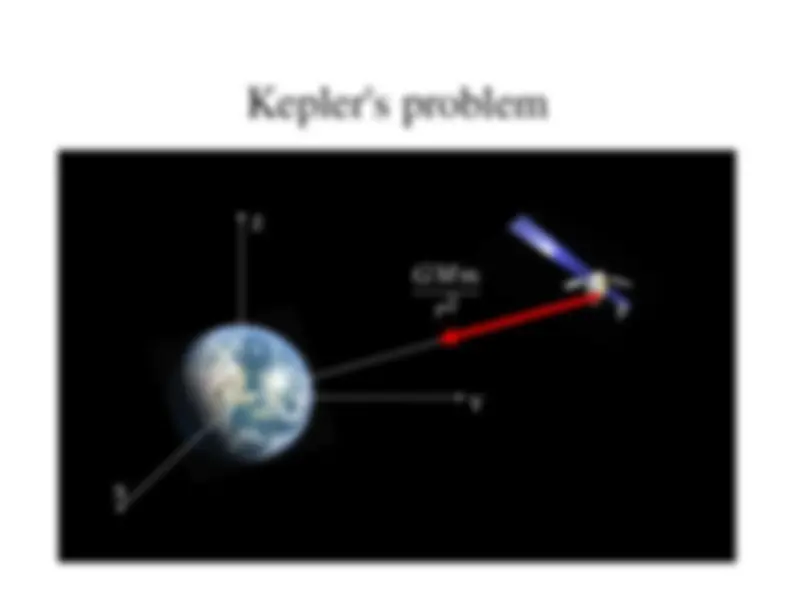
Y
X
Z
O Y
P
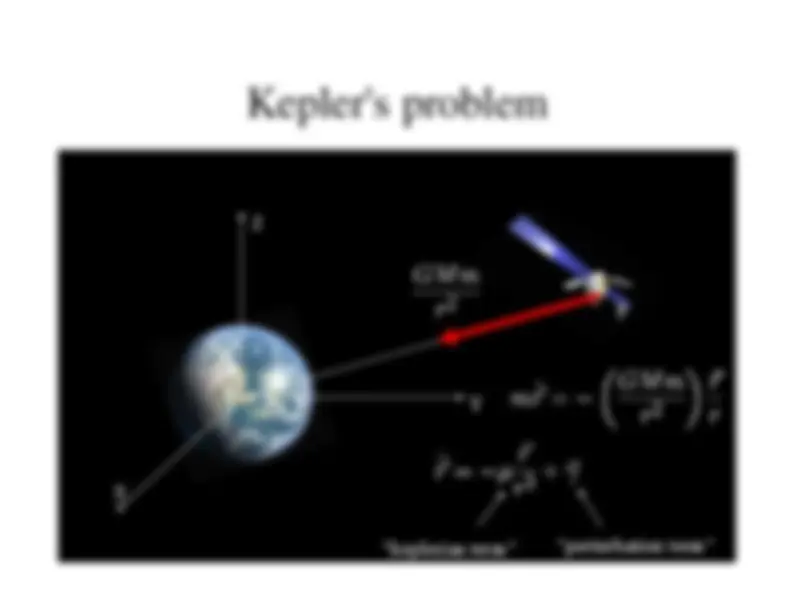
Y
X
Z
O Y
P
“keplerian term”^ “perturbation term”
P
Some vector algebra...
P
P
“First integrals” or “conservation laws”
“Eccentricity vector” is constant
P
“First integrals” or “conservation laws”
Energy (kinetic + potential) is constant
Can be derived from previous expressions
Angular momentum and eccentricity vector define the “perifocal frame” Orientation defined by 3 angles: i=inclination, Ω=longitude (right ascension) of node, and ω =argument of periapse
Conversion formulas between angles and perifocal frame
Shape of orbits. For fixed “p”
e=0 --> circular 0<e<1 --> elliptic e=1 --> parabolic e>1 --> hiperbolic
Velocity vector