¡Descarga percepción del espacio 3D y más Apuntes en PDF de Psicología de la Percepción solo en Docsity!
Tema 5
5.1 Tradiciones teóricas en la percepción del espacio visual
Percibimos un mundo en tres dimensiones, lo cual nos resulta muy útil tanto en operaciones tan simples (aparentemente) comocoger un objeto, como en operaciones de tanta precisión como conducir un vehícul o, golpear a una pelota con una raqueta o el aterrizaje de un piloto de aviación.
Ahora bien, el principal problema a explicar fue planteado por Berkeley, obispo anglicano de Cloyne, en su primera obra, quedata de 1709, titulada "Ensayo de una nueva teoría de la visión", planteándolo en estos términos: ?cómo a partir de dos representaciones bidimensionales o imágenes planas retinianas percibimos la tercera dimensión?. La respuesta a estapregunta difiere según las posiciones teóricas se enclaven en el Realismo ingenuo (Teoría de la percepción directa) o en el Empirismo (Torías de la percepción indirecta: punto de vista inferencial, constructivismo y Procesamiento de Información).
La Teoría de la percepción directa (concepción Realista) rechaza cualquier pretensión de construcción e inferencia y propone la captación inmediata de la información contenida en el estímulo. Así, Gibson (1966) sostiene que los sistemas sensoriales funcionan como auténticos sistemas perceptuales que recogen del medio ambiente la información necesaria para realizar un comportamiento adaptado a dicho entorno. Una de las más importantes fuentes de información sobre la tercera dimensión es el gradiente de densidad de textura, que se halla contenido en la situación estimular. Véase algunos ejemplos de gradientes de densidad de textura en las Figuras 7, 8, 9, 10 y 11). En la Figura 7 observamos como cada superficie refleja la luz incidente de forma peculiar, comprimiéndose la textura (aumentando su densidad) conforme se aleja del observador. También puede apreciarse que a cada cambio en la orientación de las superficies (por ejemplo, la rampa de Fig. 7b) le corresponde un patrón específico de distribución espacial de la luz reflejada. Asimismo, en la Fig. 7c, se muestra cómo las discontinuidades del terreno producen patrones característicos de distribución de la energía lumínica (Orden óptico). En la Figura 8 y Figura 9, se muestran dos gradientes de densidad de textura visual diseñados artificialmente, esto es, dibujados, informándonos igualmente de las distancias en profundidad. La Figura 10 representa un gradiente de textura, artificial y tridimensional. La Figura 11 ilustra cómo la variación en orientación (inclinación) de las superficies produce diversos gradientes de densidad de textura.
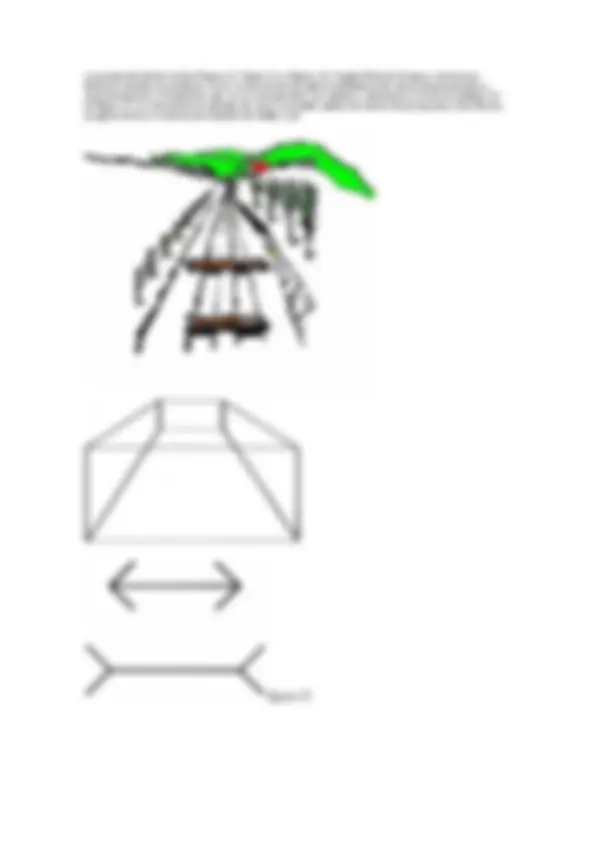
Para los empiristas y constructivistas, la percepción de la profundidad se infiere o construye mediante un conjunto de claves o 'pistas' a partir de la imagen bidimensional retiniana. La teoría constructivista de la percepción de la tercera dimensión postula una síntesis constructiva del objeto a partir de claves. Esta postura resulta ilustrada a través de la "metáfora del paleontólogo" (Neisser, 1967), quien a partir de escasos restos de un animal reproduce su figura completa (véase Figura 1).
5.2 Claves inferenciales de la profundidad
Desde la concepción empirista, que será la única que en este tema trataremos, la investigación se ha centrado en el descubrimiento e influencia de las claves que informan de la profundidad. Estas claves pueden agruparse del siguiente modo:
Claves fisiológicas:
• La convergencia ocular.
• La acomodación del cristalino.
• La disparidad retiniana.
Claves monoculares o pictóricas.
• Dinámicas.
2.1. CLAVES FISIOLOGICAS.
Destacan dos claves fundamentales:
La convergencia ocular: dado de que disponemos de visión binocular la focalización del objeto percibido requiere que los músculos oculares hagan girar cada uno de los ojos hasta converger en la percepción del objeto, de manera que tengamos unasóla imagen de él. En caso contrario se produce diplopia o visión doble.
El ángulo de convergencia, que forman los dos ojos con el objeto que se percibe [véase Figura 2], aumenta a medida que el objeto se halla más próximo y disminu ye cuando el objeto está más lejano (véase en la Figura 3 la relación inversa entre el ángulo de convergencia y la distancia). La influencia de esta clave es relativa, ya que, como indica Wilding (1.982), la convergencia no es eficaz como clave para distancias del objeto superiores a seis metros; puesto que, a partir de esa distancialos ojos están paralelos [véase en Figura 4 las relaciones geométricas implicadas en esta clave].
Es preciso observar que la clave de profundidad que suministra la convergencia no consiste en el cálculo del ángulo de convergencia (por ejemplo, trigonómetricamente), sino en la sensación propioceptiva (cinestésica) proporcionada por los músculos oculares al realizar los movimient os de convergencia. En la Figura 5 se ilustra el grado de tensión de los orbicularesde los ojos (músculos extrínsecos del globo ocular) cuando la mirada converge en un punto próximo al observador, en contraste con el grado de relajación que se produce en estos músculos cuando la mirada se fija en un punto alejado del mismosujeto.
La acomodación del cristalino: se refiere a la sensación propioceptiva (cinestésica) proporcionada por el grado de contracciónmuscular de los músculos ciliares responsables del incremento-decremento de la convexidad del cristalino, según el objeto a percibir esté cerca o lejos. Cuando el objeto está cerca la forma del cristalino es abombada (grueso) como consecuencia de la contracción del músculo ciliar y ligamento suspensor, mientras que cuando el objeto está lejos la forma es alargada (aplanado), por efecto de la relajación de dichos músculos. En la Figura 6 se esquematiza dos grados extremos del grosor del cristalino.
Por tanto, ésta constituye una de las numerosas claves de percepción de la distancia, como lo demuestran las investigacionesrealizadas en operados de cataratas, a quienes se les ha extraído el cristalino. Estos sujetos, al perder estas sensacionescinestésicas, experimentan dificultades en estimación de distancias; por ejem plo, al coger objetos.
La disparidad retiniana se tratará, más adelante, en este mismo tema, al abordar la estereopsis visual.
La perspectiva lineal (veáse Figura 12, Figura 13 y Figura 14). Según Richard Gregory, numerosas ilusiones visuales se producen como consecuencia de aplicar indebidamente claves de perspectiva a representaciones 2-D (planas), que no se corresponden con objetos o situaciones 3-D de la realidad. En la Figura 15, se representa un ejemplo de cómo es posible aplicar las claves de perspectiva a las flechas (esquina interna o exterior) de la ilusión de Müller-Lyer.
figura 15
El tamaño y ubicación aparente de objetos familiares o conocidos. Véase Figura 16, 17 y 18. En relación con esta clave debe considerarse la denominada Ley del ángulo visual, el cual correlaciona de modo perfecto con el tamaño de la imagen retiniana. En efecto, la tangente inversa del ángulo visual puede calcularse mediante el cociente entre el tamaño real del objeto y la distancia real de observación (véase Figura 19). Este parámetro, el ángulo subtendido por el objeto que tiene por vértice el centro óptico del cristalino, permite, por semejanza de triángulos y teniendo en cuenta que la distancia focal del cristalino en el ser humano adulto es constante (aproximadamente, 17 mm), calcular el tamaño de la imagen retiniana. Por consiguiente, ante un objeto que nos resulte familiar tenderemos a mantener constante el tamaño percibido, a pesar de que variará el tamaño proyectado por dicho objeto en la retina en función de la distancia de observación.
El tamaño relativo de los objetos. Ciertamente, un objeto conocido (familiar) al observarlo de lejos proyecta una imagen en la retina más pequeña que el mismo objeto observado de cerca (véase Figura 20). Así, en caso de que un objeto proyecte igual tamaño retinal que otro, estando uno a mĂĄs distancia que otro, el objeto más distante se percibirá como de mayor tamaño (vease figura 21). No obstante, debemos tener en cuenta que, solamente, el tamaño de un objeto proyectado en la retina resulta ambiguo para juzgar su tamaño real, es decir, como se desprende de la Ley del ángulo visual, debemos considerar simultáneamente la distancia de observación, para compensar, mediante el producto de estos factores, la tendencia a la constancia del tamaño a la que propendemos. En la Figura 22 presentamos un esquema que ayuda a clarificar la ambigĂźedad de la imagen retiniana, con respecto al tamaño real del objeto, que se produciría como consecuencia de no tener en cuenta la distancia de observación.
La dirección de las sombras y la luz. Normalmente, las fuentes de iluminación, tanto la natural (el sol) como la mayor parte de las fuentes artificiales (farolas, focos, lámparas, etc) se sitúan en lo alto (cielo, techo, etc), ello implica que hemos sido condicionados a percibir la direccionalidad de la luz de arriba hacia abajo y las sombras se proyectan en la base de sustentación de los objetos (abajo). Por esta razón, al observar la fotografía de los cráteres de la Luna en la Figura 25 solemos percibir los cráteres en bajo- relieve (hundidos en profundidad) y el terreno circundante a éstos en sobre-relieve (más elevados en altitud). Si invertimos esta fotografía, se invierte la direccionalidad de la luz y la sombra, y consiguientemente la profundidad, de modo que, como puede verificarse al mirar la Figura 26, que contiene la misma foto pero invertida, el terreno circundante suele percibirse en bajo-relieve y los cráteres en sobre-relieve. De manera análoga percibimos los gradientes de claro-oscuro (líneas negras sobre fondo claro), mostrados en las Figuras 27A y 27B, como elevados o hundidos, de acuerdo con la dirección percibida de la luz (zona clara) y sombra (líneas negras). Por la misma razón, percibimos las letras de la Figura 28 en relieve
Un curioso efecto que tiene su explicación en esta clave de profundidad es el denominado 'efecto de la máscara hueca' (véase Figura 29). La imagen fotográfica que aquí se muestra corresponde a la parte interior de una máscara, no obstante no se percibe hundida, sino en relieve como si se hubiese fotografiado la parte exterior de la máscara. La explicación de este fenómeno consiste en señalar que se ha manipulado la dirección de la luz (focos) que la iluminan, de modo que se invierte la percepción del relieve.
Ç
Claridad-borrosidad. Dada la dispersión de la luz por la atmósfera (difracción), tendemos a percibir lo próximo de manera más nítida, clara y con contornos más definidos; mientras que lo lejano se percibe como más difuminado, borroso y desdibujado. Compárese en la Figura 30 la nitidez de las montañas cercanas con la de las más alejadas.
2.3CLAVES DINÁMICAS.
Se denominan claves de profundidad dináminas a las que se derivan del movimiento, ya sea del observador, ya sea de los objetos. Fundamentalmente, destacaremos aquí el paralaje de movimiento, el cual consiste en desplazamientos, a distintas velocidades, de parte de la imagen sobre la retina, debidos al movimiento del observador. Según esta clave, lo próximo se mueve, a través de la retina, de modo más rápido y en dirección contraria al movimiento del observador; mientras que lo lejano surca la retina (barrido retiniano) de modo más lento y en la misma dirección. Por ejemplo, el paralaje del movimiento lo experimentamos cuando miramos desde la ventanilla de un tren o coche en movimiento, como se esquematiza en la Figura 31, los elementos del paisaje próximos atraviesan la retina a alta velocidad, los lejanos muy lentamente. En la Figura 32 se esquematiza un mismo ojo en dos posiciones sucesivas, percibiendo dos puntos uno cercano y otro lejano. Obsérvese que en un mismo tiempo de duración del desplazamiento del observador el punto próximo recorre una distancia retiniana superior que el punto más alejado, por tanto, puesto que la velocidad es el cociente entre el espacio y el tiempo, será mayor la velocidad de barrido retinano ante puntos próximos que ante otros más distantes.
Campos visuales monoculares y solapamiento binocular.
La diferente ubicación espacial de los dos ojos, susceptibles de enfocar a un mismo objeto, tiene como consecuencia que lasimágenes captadas por cada ojo, en un determinado instante no sean exactamente iguales. En otras palabras, cada ojo captauna perspectiva ligeramente distinta, aspecto que se conoce como paralaje binocular (véase Figura 35A y 35b) y que posibilita la percepción de la profundidad o visión tridimensional (3-D) y la estereopsis visual. Así pues, como consecuencia de que la distancia interpupilar es de, aproximadamente, 6.5 cm en la especie humana adulta, con el ojo izquierdo percibimos algo más del lado izquierdo del objeto y con el ojo derecho algo más del lado derecho del objeto. De esta manera podemos localizar un objeto en el espacio, es decir, podemos informar si el objeto está al frente, a nuestra izquierda o a nuestra derecha.
FIGURA 35a.- Paralaje binocular.
FIGURA 35b.- Paralaje binocular.
Realicemos una sencilla demostración experimental que nos permita evidenciar la paralaxia binocular.
EXPERIENCIA:
Coloca el dedo índice de una mano a una distancia de unos 15 cm en frente del punto interpupilar y el dedo índice de la otra mano lo colocas en el mismo plano, pero a una distancia de un brazo extendido, de manera que al mirar con los dos ojos el dedo próximo solape al lejano.
a) Fija la mirada en el dedo próximo y guiña alternativamente cada ojo, observando la imagen resultante en catafase.?Qué cambia?
?En qué dirección se produce el cambio?
b) Ahora, fija la mirada en el dedo lejano y, de modo análogo, guiña alternativamente cada ojo, observando la imagen resultante.
?Qué cambia?
?En qué dirección se produce el cambio?
c) ?Por qué se producen cambios entre el apartado 'a' y 'b'?. Relaciónalo con los datos que conoces sobre la visión binocular humana. Existe una curiosa correspondencia entre los fotorreceptores de las retinas de los dos ojos. De tal modo, que para cada punto de la retina de un ojo, existe otro punto homólogo en la retina del otro ojo. De manera que si pudiésemos solapar ambas retinas, los puntos correspondientes coincidirían (véase en Figura 37 un ejemplo de puntos correspondientes en las dos retinas). Es importante saber que cuando una misma porción de la imagen, que estamos observando, se proyecta y estimula a puntos correspondientes de las dos retinas, se produce unicidad de la visión, es decir, vemos una sola imagen y no dos como consecuencia de tener dos ojos, o sea, no vemos doble. En esta situación tiene lugar la llamada fusión binocular de los elementos de la imagen captados por las dos retinas. En caso de que dichos elementos de la imagen incidan y estimulen a puntos no correspondientes se produce disparidad retiniana.
Según el grado de disparidad producido (magnitud de la diferencia entre puntos no correspondientes), pueden presentarse dos situaciones:
I) Si el grado de disparidad es pequeño, dará lugar a fusión estereoscópica, que no es otra cosa que visión en relieve.
II) Si el grado de disparidad es grande, dará lugar a diplopia, es decir se producirá doble visión.
Cuando fijamos la mirada en un punto del espacio, la imagen de ese punto se proyecta sobre la fóvea (Fóvea= zona de la retina de mayor agudeza visual), lo que resulta altamente adaptativo para la especie. Dado que disponemos de visión binocular la focalización del objeto percibido requiere que los músculos oculares hagan girar cada uno de los ojos hasta converger en la percepción del objeto, de manera que
FIGURA 38.- Horóptero geométrico de Vieth-Müller.
FIGURA 39.- Area fusional de Panum.
El horópter nos ayuda a diferenciar dos tipos básicos de disparidad retiniana:
• La disparidad retiniana no-cruzada tiene lugar cuando percibimos un objeto más lejano que el
punto en que fijamos la mirada o, en general, del horóptero. Obsérvese el punto A en la Figura
• La disparidad retiniana cruzada, tiene lugar cuando percibimos un objeto más cercano que el
punto de fijación de la mirada (véase punto B en la misma Figura 38).
Por consiguiente, la existencia de disparidad retiniana no-cruzada indica lejanía del objeto respecto al observador y la disparidad retiniana cruzada indica cercanía, proximidad al observador.
En general, llamaremos disparidad retiniana a la diferencia entre la distancia de dos puntos no correspondientes respecto a la fóvea. Si la disparidad no es muy grande, esto es, si la distancia entre estos puntos no-correspondientes se halla dentro del área fusional de Panum, se producirá fusión estereoscópica (visión en relieve), en tanto que si están más lejos del área de Panum se producirá diplopia (doble visión).
5.4 Introducción a la esterópsis visual
En 1838, Wheatstone, partió de la hipótesis de que cada ojo capta un punto de vista diferente de los objetos tridimensionales y que la combinación, en el cerebro, de estos dos puntos de vista originaba el efecto de visión en profundidad típico de la binocularidad. A fin de verificar su hipótesis, realizó dos dibujos de un mismo objeto, denominados estereogramas, de modoque cada uno de ellos correspondía al punto de vista de cada objeto por separado (como si fuera una fotografía disparadadesde la posición de cada ojo). Para introducirlos separadamente (uno por cada ojo) en el sistema visual, construyó un aparatode su propia invención denominado estereoscopio (véase Figura 40 y Figura 41). Éste constaba de un dispositivo con dos espejos y un visor que, mediante un tabique, separaba lo que veía el ojo izquierdo de lo que veía el derecho. Al ser utilizadoeste aparato por los sujetos veían un único objeto en relieve, localizado en el punto interpupilar y denominado por Julesz(1971) percepción ciclópea.
FIGURA 40.- Esteroscopio de espejos de Wheastone (1838).
FIGURA 41.- Visión esteroscópica.
La disparidad binocular se puede producir artificialmente, mediante fotografías de una misma escena u objeto, tomadas desdeposiciones dispares en el mismo plano horizontal. Debe tenerse presente que el Sistema visual tolera muy poca disparidad vertical, de ahí que el desplazamiento del punto de vista de la cámara fotográfica deba ser, únicamente, vertical, manteniéndose a la misma altura horizontal.
La agudeza estereoscópica es mayor en la zona de la fóvea y decrece conforme avanzamos hacia la periferia. Sin embargo, el radio de acción de este indicador es limitado, puesto que sólo actúa para objetos que se encuentren a menos de una distancia de 445,5 metros respecto al observador (Graham,
- y algunos sujetos son sensibles a disparidades de hasta 2 seg. de arco (ángulo visual, expresado en sistema sexagesimal). En la actualidad la estereopsis es un campo prioritario de investigación desde las aproximaciones Neurofisiológica, Psicofísica e Inteligencia Artificial.
Desde la aproximación psicofísica, Julesz (1960, 1964) propuso los estereogramas de puntos aleatorios
parecen apoyar la idea de que los detectores estereo se hallen organizados en tres grupos diferenciados, según que el tipo de información contenida sea de convergencia, divergencia o vergencia nula (disparidad cero), lo cual parece verse confirmado por la neurofisiología.
Debido a estos argumentos, Marr y Poggio (1979) propusieron otra teoría de la fusión estereo basada en el emparejamiento a distintas escalas de resolución (filtrado de distintas frecuencias espaciales), según la cual serían los emparejamientos quienes controlarían los movimientos de vergencia de sendos ojos (valores motores), posibilitando que la información procedente de máscaras grandes aproxime a las más pequeñas a su rango de correspondencia. Dicho control de vergencia, en opinión de Marr (1982), podría ser directo (derivado de las propias neuronas de emparejamiento), indirecto (interviniendo como mediador el retén de memoria), o incluso, con mayor probabilidad de ambos tipos a la vez. Sin embargo, este segundo algoritmo, no cooperativo, de Marr y Poggio no parece ajustarse totalmente a la evidencia psicofísica disponible sobre la estereopsis.
Frisby y Mayhew (1980) y Mayhew y Frisby (1981) desarrollaron otro modelo computacional, en el cual los procesos de emparejamiento estereo se consideran íntimamente vinculados a la elaboración de descripciones en el bosquejo primario bruto, apartándose de la concepción de Marr sobre la estereopsis como un módulo independiente del procesamiento visual. Posteriormente, Pollard, Mayhew y Frisby (1985) propusieron otro algoritmo estereo alternativo (conocido por 'PFM'), habiendo sido diseñado para mostrarse más acorde con los hallazgos psicofísicos, mediante la implementación de una regla acerca de qué emparejamientos de puntos debían tolerarse y cuáles evitarse. Estos algoritmos se basan en un procesamiento de abajo-arriba, sin considerar que puedan hallarse implicados otros procesos cognitivos, de más alto nivel, en el logro de la estereopsis, como habían sugerido Harris y Gregory (1973) y, ulteriormente, Ramachandran y Caavanagh (1985), en experimentos que utilizaban como pares estereo los denominados contornos subjetivos.
5.5 Apéndice: imágenes 3D
FIGURA 43.-El abismo visual de Eleanor Gibson.
Otros investigadores (Held, Birch y Gwiazda, 1980), utilizando el método de fijación visual con bebés y recurriendo a estímulosestereoscópicos observados a traves de gafas- filtro de luz polarizada, constataron que dichos bebés comienzan a preferir el estímulo tridimensional con posterioridad a las 20 semanas de edad.
También se ha investigado si los bebés son capaces de utilizar las claves monoculares de profundidad antes que la clave de la disparidad retiniana. Las investigaciones parecen concluir que solamente después de haberse alcanzado la capacidad de extraer la clave binocular por excelencia (disparidad retiniana) comienzan a utilizarse las claves secundarias monoculares o pictóricas (solapamiento,
perspectiva, sombreado-luz, tamaño relativo, etc.)
Las investigaciones centradas en la esteropsis utilizan el estereoscopio, o bien hacen uso de los llamados anaglifos, fotografía con luz polarizada en diferente dirección, hologramas, etc.
La técnica de elicitación de la estereopsis mediante anaglifos consiste en realizar dos dibujos de un mismo objeto, uno en tinta roja y otro en tinta verde. Estos dibujos no deben estar totalmente superpuestos, sino más bien ligeramente desplazado uno del otro, con objeto de introducir una disparidad geométrica artificialmente. Al ser visualizada la figura resultante con las gafas-filtro rojo/verde, provocamos que a cada ojo llegue una perspectiva ligeramente distinta, al igual que sucede cuando observamos la realidad tridimensional, ya que, al estar separados cada ojo unos 65 mm (promedio en la especie humana adulta) obtenemos dos imágenes dispares de modo natural. En efecto, el filtro rojo impide que el dibujo en rojo alcance la retina de este ojo, mientras que el filtro verde hace lo propio con el dibujo verde respecto al otro ojo. Si el lector se procura unas gras filtro rojo/verde podrá experimentar el potente efecto estereoscópico logrado, mediante la técnica de los anaglifos, visualizando a través de tales gafas.
Otras técnicas para elicitar la estereopsis visual:
Además de la técnica antes expuesta para elicitar la estereopsis (visión 3-D o en relieve) existen otras técnicas alternativas que pueden observarse, por ejemplo, en el Museo de la Ciencia de Barcelona, tales como los hologramas, que pueden verse en la sala de óptica, estereogramas de puntos aleatorios, que pueden verse directamente (tras un mínimo entrenamiento) sin ayuda de equipo óptico alguno. En la sala de percepción hay dos técnicas estereoscópicas diferentes. Una de ellas la hemos citado anteriormente ( anaglifos). La otra consiste en superponer dos imágenes dispares (captadas desde perspectivas ligeramente distintas) fotografiadas con luz polarizada en direcciones perpendiculares y, posteriormente, observarlas a través de cristales que actúan de filtros polarizados en direcciones perpendiculares. Ambas demostraciones experimentales de la sala de percepción constituyen tests (instrumentos de medida) para evaluar la agudeza estereoscópica. Es decir, permiten cuantificar el máximo grado de disparidad tolerado por una persona.
?También puede elicitarse la visión estéreo mirando a través de un estereoscopio de lentes convergentes (análogo al de Wheatstone) diapositivas fotografiadas con disparidad?. No resulta difícil tratar de imaginar cómo pueden hacerse pares estéreos de diapositivas. Acoplando dos cámaras iguales a un eje, de modo que pueda regular la separación entre ellas (disparidad geométrica). Al enfocar con dos puntos de vista distintos sobre un mismo objeto y disparar las dos fotos, obtendremos un par estéreo.
Especial interés, para este campo de investigación, tienen los estereogramas de puntos aleatorios propuestos por Bela Julesz (1960, 1964), un ingeniero de telecomunicaciones interesado por este fenómeno perceptivo (objeto de estudio de la Psicología), que describíamos anteriormente. Ya sea mediante la técnica de los pares de estereogramas, presentando cada imagen (estereograma) separadamente a cada ojo, ya sea mediante la técnica del estereograma de puntos aleatorios de una sola imagen. En la introducción a los citados libros de la colección "El ojo mágico" pueden encontrarse algunos detalles relativos a la generación computacional de tales estereogramas, así como sugerencias de diversos procedimientos de visualización.
Finalmente, para no transmitir al lector la idea de que se trata, tan sólo, de un pasatiempo perceptivo más (como en su momento lo fueron las ilusiones visuales, los postefectos y las figuras imposibles), sino, más bien al contrario, poderosas herramientas de investigación científica que nos ayudan a comprender el complejo proceso de la percepción visual, y al objeto de mostrar sucintamente ciertos campos de aplicabilidad de la estereopsis visual, concluiremos con tres notas ilustrativas del por qué la estereopsis visual es un campo de investigación privilegiado en las principales Universidades, Centros de investigación e Institutos de alta tecnología:
UNA APLICACION LUDICA:
Probablemente habrás visto cine estereoscópico (en relieve). Sucede con frecuencia que los espectadores se esconden tras la butaca, cuando, por ejemplo, los indios lanzan flechas, debido a la potente ilusión de realidad tridimensional así lograda. Este tipo de cine se produce filmando la película, simultáneamente, con dos cámaras y utilizando luz polarizada en direcciones perpendiculares. Posteriormente, el espectador la visualizará a través de gafas-filtro de dicha luz polarizada.
UNA REFLEXION SOBRE EL FUTURO INMEDIATO:
?Te imaginas un robot, dotado de dos ojos electrónicos (cámaras de vídeo) y un procesador que analice cada par de imágenes estéreo (estereogramas) que vaya registrando en el transcurso del tiempo?. Fácilmente, podríamos imaginar algunas de las posibles acciones que podría ejecutar. Por ejemplo, podría destinarse a tareas de alto riesgo, peligrosas o inaccesibles para los seres humanos, tales como realizar ciertos trabajos en áreas radiactivas (centrales nucleares, etc.), policía artificiero que desactiva