¡Descarga PROGRAMAS QUE USAR EN SCILAB y más Ejercicios en PDF de Compiladores solo en Docsity!
RESPUESTA A ESCALÓN UNITARIO
num=poly([4 1],'s','c'); den=poly([2 2 4 2 1],'s','c'); G=syslin('c',num,den); t=0:0.1:50; y=csim('step',t,G); plot(t',y'); title('Ejemplo de respuesta al escalón unitario') SISTEMA DESCONTROLADO s=poly([0 1],'s','c'); //Variable de Laplace G=(0.0182(0.95s+1)(1- 44.75s))/(26.27s^3+36.31s^2+10.14*s+1); //función de transferencia del sistema t=0:0.1:50;y=csim('step',t,G); plot(t',y'); title('Ejemplo aplicativo'); xlabel('tiempo (seg)','fontSize',3); ylabel('Cambio de concentración','fontSize',3);
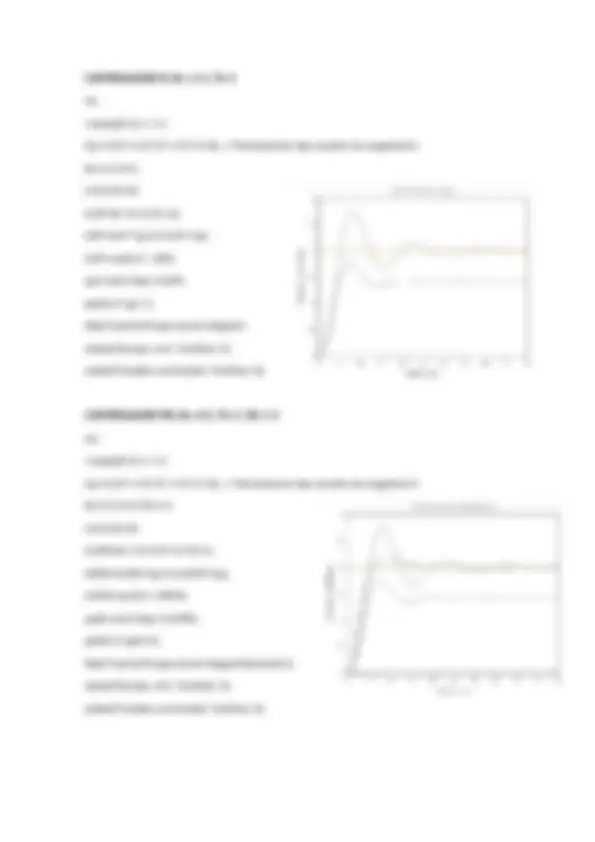
CONTROLADOR P, Kc = 2. clc; s=poly([0 1],'s','c'); Gp=1/((5s+1)(2s+1)(s+1)); // Perturbación tipo escalón de magnitud 2; Kc=2.5; t=0:0.05:50; GcP=Kc; GlP=GcPGp/(1+GcPGp); GsP=syslin('c', GlP); yp=csim('step',t,GsP); plot(t,2*yp); title('Control Proporcional'); xlabel('tiempo, min','fontSize',3);
CONTRARRESTANDO UNA PERTURBACION
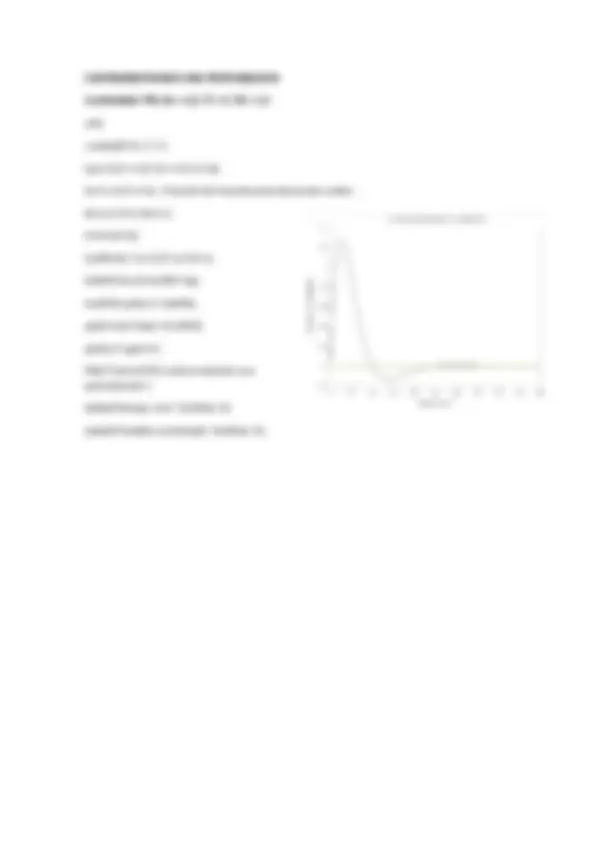
Controlador PID, Kc = 2,5; Ti = 5; Td = 1, clf(); s=poly([0 1],'s','c'); Gp=1/((5s+1)(2s+1)(s+1)); Gx=1.5/(3s+1); //función de transferencia de primer orden; Kc=2.5;Ti=5;Td=1.5; t=0:0.05:50; GcPID=Kc(1+1/(Tis)+Tds); GlxPID=Gx/(1+GcPIDGp); GsxPID=syslin('c',GlxPID); ypid=csim('step',t,GsxPID); plot(t,2ypid,'k'); title('Control PID contrarrestando una perturbación'); xlabel('tiempo, min','fontSize',3);
Controlador PID, Kc = 2,5; Ti = 4; Td = 1, clf(); s=poly([0 1],'s','c'); Gp=1/((5s+1)(2s+1)(s+1)); Gx=1.5/(3s+1); //función de transferencia de primer orden; Kc=2.5;Ti=4;Td=1.5; t=0:0.05:50; GcPID=Kc(1+1/(Tis)+Tds); GlxPID=Gx/(1+GcPIDGp); GsxPID=syslin('c',GlxPID); ypid=csim('step',t,GsxPID); plot(t,2ypid,'k'); title('Control PID contrarrestando una perturbación'); xlabel('tiempo, min','fontSize',3);