¡Descarga tesis de pasteurizacion y más Tesis de Bachillerato en PDF de Electrotecnia solo en Docsity!
UNIVERSIDAD RICARDO PALMA
FACULTAD DE INGENIERÍA
ESCUELA PROFESIONAL DE INGENIERÍA
ELECTRÓNICA
MODERNIZACIÓN DEL MÓDULO DE CONTROL DE
NIVEL, CON TRANSMISOR DE NIVEL ULTRASÓNICO,
PLC S7-1200 Y PANTALLA HMI, PARA EL CONTROL DE
LAS VARIABLES: NIVEL Y FLUJO
TESIS
PARA OPTAR EL TÍTULO PROFESIONAL DE
INGENIERO ELECTRÓNICO
PRESENTADA POR
Bach. GUERRERO VALENZUELA, BERNARDO
DIMAS
Asesor: Mg. Ing. GONZÁLEZ PRADO, JULIO CÉSAR
LIMA-PERÚ
DEDICATORIA
A mi esposa Mariá e hija Keith, quienes llegaron a mi vida para quedarse por siempre, siendo el motor y motivo en mi vida, gracias por todo su amor, consejos y apoyo incondicional para lograrlo juntos.
A mis padres Dimas y María Antonieta, por darme su amor y apoyo incondicional en todo momento de mi vida, sentando en mí, las bases de responsabilidad y deseos de superación, las cuales me permitieron crecer como ser humano, y profesionalmente.
AGRADECIMIENTO
Agradezco a Dios por llegar para morar en mi hogar en el mejor momento de nuestras vidas, para poder ahora permitirme decir que: “Todo lo puedo en Cristo que me fortalece” (Filipenses 4:13).
Al Ing. Humberto Chong, por su amistad y enseñanzas que me permitieron culminar este trabajo.
Al Dr. Ing. Pedro Huamaní, por su amistad, paciencia, e impulso para la elaboración de este trabajo.
A mi asesor Mg. Ing. Julio González, por la gentileza que tuvo en aceptar la asesoría y la importante colaboración en la elaboración de este trabajo.
iv
ÍNDICE GENERAL
RESUMEN ...................................................................................................................... xi
vi
RECOMENDACIONES ................................................................................................. 65
REFERENCIAS BIBLIOGRÁFICAS ........................................................................... 66
ANEXOS ........................................................................................................................ 71
Anexo 1: Hoja técnica PLC Siemens S7 1200 CPU AC-DC-RLY ........................... 72 Anexo 2: Hoja técnica Transmisor de Nivel Ultrasónico SGM Lektra modelo Meter2F4A ................................................................................................ 76 Anexo 3: Especificaciones Transmisor de Flujo Electromagnético Yokogawa AXF025G .................................................................................................. 78 Anexo 4: Hoja técnica posicionador inteligente para válvula .................................... 80 Anexo 5: Hoja técnica Siemens SB 1232 AO ............................................................ 82 Anexo 6: Hoja técnica Siemens SM 1231 AI ............................................................ 85
vii
ix
ÍNDICE DE TABLAS
Tabla Nº 1: Tabla de ajuste en bucle cerrado de los parámetros de un controlador PID propuesto por Ziegler-Nichols. .......................................................... 14 Tabla Nº 2: Principales características de las pruebas realizadas. ................................. 59 Tabla Nº 3: Principales características de las pruebas realizadas con perturbación. ..... 62 Tabla Nº 4: Tabla de costo ............................................................................................. 62
x
- INTRODUCCIÓN ABSTRACT.................................................................................................................... xii
- CAPÍTULO I: PLANTEAMIENTO Y DELIMITACIÓN DEL PROBLEMA
- 1.1. Problemática..........................................................................................................
- 1.1.1. Problema General
- 1.1.2. Problemas Específicos
- 1.2. Objetivos
- 1.2.1. Objetivo General
- 1.2.2. Objetivos Específicos
- 1.3. Importancia y justificación
- 1.3.1. Importancia
- 1.3.2. Justificación
- 1.4. Alcances y limitaciones.........................................................................................
- 1.4.1. Alcances
- 1.4.2. Limitaciones
- CAPÍTULO II: MARCO TEÓRICO
- 2.1. Antecedentes del estudio de investigación
- 2.1.1. Antecedentes Nacionales
- 2.1.2. Antecedentes Internacionales
- 2.2. Bases teóricas relacionadas con el tema
- 2.2.1. Sistemas de Control
- 2.2.2. Control P, PI y PID
- 2.2.3. Métodos de Sintonía de Controladores PID
- 2.2.4. Control en Cascada
- 2.2.5. Hardware PLC Simatic S7
- 2.2.6. Sensor de Flujo
- 2.2.7. Transmisor de Flujo Electromagnético
- 2.2.8. Sensor de Nivel
- 2.2.9. Transmisor de Nivel Ultrasónico
- 2.3. Hipótesis
- 2.3.1. Hipótesis General v
- 2.3.2. Hipótesis Específicas
- 2.4. Variables de Estudio
- 2.5. Tipo y método de investigación
- 2.5.1. Tipo de investigación
- 2.5.2. Método de investigación
- 2.5.3. Diseño de investigación
- 2.6. Instrumento de recolección de datos
- 2.7. Técnicas de recolección de datos...............................................................
- 2.8. Definición de términos
- CAPÍTULO III: DISEÑO DE LA INVESTIGACIÓN
- 3.1. Módulo de control de nivel del Laboratorio de Control
- 3.2. Configuración del transmisor de nivel ultrasónico
- 3.3. Creación de proyecto y configuración de equipos Siemens................................
- 3.4. Escalamiento de señales análogas e ingreso del punto de consigna o set-point. - principal OB1. 3.5. Creación de botones de encendido y apagado en el bloque organizacional
- 3.6. Control en cascada de los lazos de control primaria y secundaria.
- 3.7. Programación de la pantalla HMI.
- 3.8. Configuración del servidor web del PLC.
- CAPÍTULO IV: PRUEBAS Y RESULTADOS
- 4.1 Análisis del resultado con valor set-point de 1300mm.
- 4.2 Análisis del resultado con valor set-point de 1400mm.
- 4.3 Análisis del resultado con valor set-point de 1500mm.
- 4.4 Análisis del resultado con valor de set-point de 1300mm con perturbaciones.
- 4.5 Análisis del resultado con valor de set-point de 1400mm con perturbaciones.
- 4.6 Análisis del resultado con valor de set-point de 1500mm con perturbaciones.
- 4.7 Presupuesto
- CONCLUSIONES
- Figura Nº 1: Sistema de Control de Lazo Abierto. ÍNDICE DE FIGURAS
- Figura Nº 2: Sistema de Control de Lazo Cerrado.
- Figura Nº 3: Control PID de una planta.
- Figura Nª 4: Diagrama de bloque del método Relé de Åström y Hägglund
- Figura Nª 5: Diagrama de bloques de un sistema con control en cascada.
- Figura Nª 6: Diagrama de bloques de la arquitectura en cascada.
- Figura Nº 7: Fotografía del controlador Simatic S7 1200.
- Figura Nº 8: Ley de Faraday en una tubería de fluido.
- Figura Nº 9: Transmisor de flujo electromagnético ADMAG AXF..............................
- Figura Nº 10: Representación del volumen del líquido.
- Figura Nº 11: Márgenes de detección de un sensor ultrasónico.
- Figura Nº 12: Transmisor de nivel ultrasónico SGM-LEKTRA.
- flujo. Figura Nº 13: Esquema del módulo de control en Cascada para las variables nivel y
- Figura Nº 14: Implementación final del módulo de control de nivel.
- Figura Nº 15: Diagrama de bloques y disturbios del módulo de control.
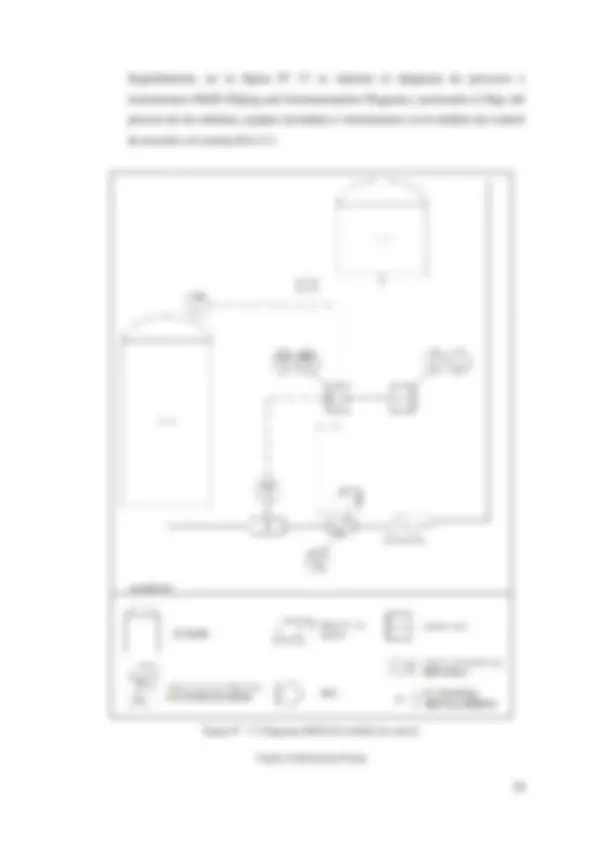
- Figura Nº 16: Diagrama PFD del módulo de control.
- Figura Nº 17: Diagrama P&ID del módulo de control.
- nivel ultrasónico. Figura Nº 18: Conexión del modem HART para la configuración del transmisor de
- nivel ultrasónico, mediante el software DevCom2000. Figura Nº 19: Ingreso de valores mínimo y máximo a medir por el transmisor de
- Figura Nº 20: Creación de proyecto...............................................................................
- Figura Nº 21: Ingreso de módulos Siemens adicionales al proyecto
- Figura Nº 22: Pantalla Siemens KTP 700 Basic del proyecto
- Figura Nº 23: Escalamiento de las señales análogas
- Figura Nº 24: Definición de botones de encendido y apagado
- Figura Nº 25: Programación del Lazo Primario
- Figura Nº 26: Programación del Lazo Secundario
- Figura Nº 27: Imagen raíz de la pantalla HMI.
- Figura Nº 28: Variables asignadas en la pantalla HMI.
- Figura Nº 29: Edición del archivo webserver71200.htm.
- Figura Nº 30: Ubicación del archivo webserver71200.htm. viii
- Figura Nº 31: Generación de bloques necesarios del servidor web del PLC.................
- Figura Nº 32: Creación de usuario administrativo del servidor web del PLC.
- Figura Nº 33: Verificación del estado del PLC desde un computador.
- Figura Nº 34: Interacción de las variables del PLC desde un computador.
- Figura Nº 35: Página de acceso remoto al PLC desde un computador
- Figura Nº 36: Verificación del estado del PLC desde un dispositivo móvil.
- Figura Nº 37: Interacción de las variables del PLC desde un dispositivo móvil.
- Figura Nº 38: Página de acceso remoto al PLC desde un dispositivo móvil
- Figura Nº 39: Valores del controlador primario.
- Figura Nº 40: Valores del controlador secundario.
- Figura Nº 41: Comportamiento del controlador primario con set-point 1300mm.........
- Figura Nº 42: Comportamiento del controlador secundario con set-point 1300mm.
- Figura Nº 43: Comportamiento del controlador primario con set-point 1400mm.........
- Figura Nº 44: Comportamiento del controlador secundario con set-point 1400mm.
- Figura Nº 45: Comportamiento del controlador primario con set-point 1500mm.........
- Figura Nº 46: Comportamiento del controlador secundario con set-point 1500mm.
- perturbaciones. Figura Nº 47: Comportamiento del controlador primario con set-point 1300mm, con
- perturbaciones. Figura Nº 48: Comportamiento del controlador primario con set-point 1400mm, con
- perturbaciones. Figura Nº 49: Comportamiento del controlador primario con set-point 1500mm, con
- Ecuación Nº 1: Salida para el control Proporcional....................................................... ÍNDICE DE ECUACIONES
- Ecuación Nº 2: Función de transferencia Proporcional
- Ecuación Nº 3: Salida para el control Integral
- Ecuación Nº 4: Función de transferencia Integral
- Ecuación Nº 5: Salida para el control Proporcional Integral
- Ecuación Nº 6: Función de transferencia PI
- Ecuación Nº 7: Algoritmo PID
- Ecuación Nº 8: Ganancia última para el método relé.
- Ecuación Nº 9: Voltaje generado en conductor
- Ecuación Nº 10: Volumen de líquido en tanque
- Ecuación Nº 11: Distancia de cuerpo reflejante
- Ecuación Nº 12: Velocidad de propagación de la onda sonora.
xii
ABSTRACT
This research work describes the implementation and configuration of the didactic module for level control of the Control Laboratory of the Ricardo Palma University, for the control, measurement and monitoring of the variables level and flow, from the new equipment acquired, as the ultrasonic level industrial transmitter, S7 1200 PLC, HMI screen and analog input and output modules for S7 1200, applying a cascade control strategy to achieve control of the water level of the main tank; so also achieve control and monitoring through the HMI screen, also using the new built-in application that is the web server that has the PLC. The connection scheme of the different equipment and modules to be used was elaborated; then the necessary parameters of configuration were chosen, of the equipment with HART protocol for its correct operation; The programming was then analyzed in the new software also acquired with the equipment, which is STEP 7 BASIC V.14, where the electrical diagram was created, then the analog signals were scaled; several tuning tests were performed with the PID control parameters of the variable level and flow, which were entered in the configuration window of each of them, enabling the activation of manual entry to enter new values in replacement of the initials by defect of the program, in order to obtain a response closer to the set point. The best response of the process was obtained with a trial and error procedure, starting with the primary loop and continuing with the secondary loop, and starting from the proportion of proportional gains of 1: 4. In this way, the best tuning values achieved are the following: Primary Controller: Proportional Gain Kp = 0.25, Integral Constant Ki = 10.31 and Derivative Constant Kd = 0. Secondary Controller: Proportional Gain Kp = 2.5, Integral Time Ki = 0 and Derivative Constant Kd = 0.
Keywords: PID Control, PLC S7-1200, Touch Screen HMI, Step 7 Software.
1
INTRODUCCIÓN
El control de nivel tiene como objetivo asegurar el mantenimiento del nivel en un valor predeterminado por el usuario, y para este caso, el nivel a mantener es del agua del tanque principal del módulo didáctico de control de nivel del Laboratorio de Control de la Universidad Ricardo Palma, el cual sirve para fines didácticos y demostrativos.
En el año 2012, los alumnos del curso de Sistemas de Automatización Industrial de la carrera de Ingeniería Electrónica, construyeron el módulo de control de nivel para el Laboratorio de Control en donde fue utilizado el controlador lógico programable (PLC) S7-200 en un lazo de control con la variable nivel, mediante un transmisor ultrasónico. Para el año 2017 el Laboratorio de Control adquirió los nuevos modelos PLC S7- con interface hombre máquina (HMI) Siemens KTP 700 Basic color, los que se utilizarán para la presente investigación utilizando dos lazos de control para las variables nivel y flujo, programadas en el nuevo software Step 7 Basic V.14, donde se aprovechan las nuevas herramientas que presentan estos equipos como la comunicación profinet y servidor web del PLC.
El Área de Control y Automatización de Procesos, es una rama muy importante en la especialización del estudiante de la carrera de Ingeniería Electrónica, es por ello que esta investigación proporcionará los elementos básicos en forma práctica de un control de nivel tal cual lo pueden encontrar en el ámbito laboral en las empresas que utilizan la automatización industrial, tales como el sector minero, petróleo, gas, etc, donde aparte de la labor de control también podrán monitorear mediante la programación de la pantalla HMI, y el acceso remoto, mediante el servidor web que brinda el propio PLC.
3
c) ¿Cómo programar la pantalla táctil HMI para visualizar la variable del proceso, el set-point y la variable de control, así como para interactuar con el módulo de control de nivel, para el encendido y apagado de este?
1.2. Objetivos
1.2.1. Objetivo General Modernizar el módulo de control de nivel del Laboratorio de Control de la Facultad de Ingeniería de la Universidad Ricardo Palma, haciendo uso de equipos e instrumentos de campo recientemente adquiridos.
1.2.2. Objetivos Específicos a) Modernizar el módulo de control de nivel del Laboratorio de Control de la Facultad de Ingeniería de la Universidad Ricardo Palma sustituyéndolo por equipos e instrumentos de campo recientemente adquiridos por la carrera de Ingeniería Electrónica de la Facultad de Ingeniería de la Universidad Ricardo Palma. b) Reemplazar los instrumentos y equipos del módulo de control FI-URP por un transmisor de nivel ultrasónico con protocolo de comunicación Hart, PLC S7 1200, módulos analógicos de entrada y salida, y programación Tia Portal. c) Establecer las variables primaria y secundaria para la estrategia de control en cascada propuesta sobre el módulo de control de nivel, así como la respectiva programación del PLC para el correcto funcionamiento del mismo. d) Programar la pantalla táctil HMI para visualizar la variable del proceso, el set-point y la variable de control, así como para interactuar con el módulo de control de nivel, para el encendido y apagado de este.
1.3. Importancia y justificación
1.3.1. Importancia
4
Este proyecto es transcendente debido a que, con la utilización de los modernos equipos adquiridos recientemente por el Laboratorio de Control, tales como el Siemens PLC S7-1200, la pantalla HMI KTP 700 Basic color, y el transmisor de nivel ultrasónico SGM Lektra modelo METER2F4D, implementados en el módulo de control de nivel, ayudará a los estudiantes a realizar prácticas de automatización e instrumentación con la tecnología actual que encontrarán, en un ambiente laboral en las áreas de instrumentación y automatización. Los estudiantes podrán investigar los nuevos atributos con los que cuentan los equipos adquiridos por el Laboratorio de Control, tal como la comunicación profinet, servidor web, entre otros.
1.3.2. Justificación
El presente documento aporta información útil en la solución del problema que acontecía en el Laboratorio de Control, debido a que el módulo de control de nivel no era utilizado ante la obsolescencia del software para poder controlarlo, así mismo se aprovecha los nuevos atributos adicionales con que cuenta el nuevo PLC S7-1200, como el servidor web que se ha implementado en el presente trabajo, así también se ha adicionado la utilización de una pantalla HMI KTP 700 Basic color para el monitoreo y control complementario al módulo de control de nivel. Además, mejorar la eficacia del control del nivel, al implementarse un control tipo cascada, en donde se ingresaron adecuadamente los valores necesarios tanto para el lazo de control primario, como el lazo secundario.
1.4. Alcances y limitaciones
1.4.1. Alcances
El presente proyecto se desarrolla dentro del Laboratorio de Control, utilizándose el módulo didáctico de control de nivel para líquidos en la Universidad Ricardo Palma, para permitir a las carreras de Ingeniería Electrónica e Ingeniería Mecatrónica interesados en el área de automatización e instrumentación electrónica, a profundizar sus conocimientos en control en
6
CAPÍTULO II: MARCO TEÓRICO
2.1. Antecedentes del estudio de investigación
2.1.1. Antecedentes Nacionales
Campos, D. & Gonzalez, M. (2014), en la tesis: Implementación de un Sistema de Monitoreo y Control de un Módulo de Medición de Nivel a través de un Sistema SCADA. Logra implementar un sistema de control y monitoreo del módulo de medición de nivel que se encuentra en el Laboratorio de Control de la Universidad Ricardo Palma, utilizando los antiguos equipos del Laboratorio de Control, Siemens S7-200, y módulo de entrada y salidas analógicas EM 235, además que realiza la adquisición y generación de datos a partir de un software SCADA Labiew mediante la utilización de un servidor OPC, para poder monitorear y controlar solo una variable industrial, y asimismo mostrando valores en tiempo real de la variable, logrando como resultado final la implementación de una estrategia de control del tipo proporcional e integral (PI); y también se pudo cumplir con el objetivo de ayudar a los alumnos en mejorar el nivel de practica en automatización como se pudiera encontrar en un ambiente laboral.
Gómez, O. & Betalleluz, A. (2015), en la tesis: Sintonización de un PID para Controlar Remotamente la Variable Nivel en un Módulo Educativo. Desarrollado en el Laboratorio de Control de la URP, construyeron su propio módulo de control de nivel a pequeña escala, teniendo como objetivo la sintonización de un controlador PID, mediante los métodos de ganancia límite y método del tanteo, para el control de una manera remota de la variable nivel con el software Team Viewer, y utilizando para la adquisición de datos la tarjeta de National Instruments NI USB-6008. Para esto implementaron en una interfaz gráfica con el software Labview, realizándose todo, con la finalidad que el alumno pueda entender como es la sintonía de un PID para los métodos de Ganancia Límite y de Tanteo; finalmente logran
7
concluir al comparar los resultados obtenidos de la sintonización, que el método del tanteo es mucho mejor, ya que presenta muy poco valor de error en estado estacionario, pese a tener mayor tiempo de estabilización con respecto al método de ganancia límite.
Dávila, E. & Tasayco, H. (2017), en la tesis: Implementación de una Estrategia de Control en Cascada para el Nivel de Agua, en el Módulo Didáctico del Laboratorio de Control-URP. Implementan una estrategia de control en cascada para el control de nivel de agua por medio de un transmisor de presión diferencial de marca Yokogawa, ubicado en la parte inferior del tanque principal, y controlado por válvula proporcional, concluyendo que conforme la columna de agua en el tanque de medición va aumentando generará un presión hidrostática, que es censado por el transmisor de presión diferencial, independientemente de la anchura del tanque, esta presión realiza una interpolación lineal que será interpretado en centímetros de nivel, obteniendo como resultado final que ambos lazos de control nivel y flujo fueron implementados con una estrategia de control del tipo proporcional e integral (PI).
2.1.2. Antecedentes Internacionales
Astudillo, R. (2016), en el trabajo de grado titulado: Diseño e Implementación de un Prototipo de Medidor de Nivel de Agua a través de un Sensor Ultrasónico para Pasos Deprimidos. En este trabajo se realiza el diseño e implementación de un prototipo para la medición de nivel de agua a través de un sensor ultrasónico para pasos a desnivel, usando para su procesamiento el arduino uno conjuntamente con el microcontrolador atmega 328p, y mediante módulo GSM se enviaron mensajes de texto a un número telefónico predeterminado cuando alcance tres niveles de agua previamente configurados. Y con esto se podrá prevenir accidentes de tránsito que podrían ocasionarse debido a las inundaciones en los pasos a desnivel en la ciudad de Quito, el resultado final fue la contribución a la reducción de accidentes de tránsito generado por