Scarica Parte 6 - Componenti e più Dispense in PDF di Meccanica Applicata solo su Docsity!
manipolatore
sono azionati da sistemi composti da
una
fonte di alimentazione
un
controllore
convertitore di potenza
motore
un
riduttore di velocità
organi di trasmissione della potenza
- Il movimento è impresso mediante
motori elettrici
solitamente
angolari
motori pneumatici
o
oleodinamici
quasi unicamente
lineari
trasformati
lineari
angolari
azionamento
lineare
motore angolare
ruota elicoidale-vite senza fine
azionamento
angolare
motore lineare
cerniera
SISTEMA DI ATTUAZIONE DEI GIUNTI
SISTEMA DI ATTUAZIONE DEI GIUNTI
AZIONAMENTO LINEARE
AZIONAMENTO LINEARE
Per ridurre il problema si possono adottare i seguenti metodi:•
utilizzare attrito volvente anziché radente, impiegando viti a ricircolo disfere
rivestire le guide di strisciamento in acciaio con materiali plastici aelevata resistenza alla compressione e all’usura e con dilatazione termicasimile all’acciaio caratterizzati da un coefficiente d’attrito di valorepressoché costante con la velocità
uno di questi materiali è il “turcite”
a base di bronzo e politetrafluoroetilene
lubrificare con olio in pressione il quale mantiene separati i due organi inmoto relativo, riducendo di molto l'attrito
Uno dei problemi più importanti relativi a giunti prismatici e guide èriuscire a ridurre l’attrito ed a mantenerlo costante anche alle bassevelocità, per evitare lo “stick-slip”
movimento a scatti che si
manifesta a basse velocità, ad esempio in un moto di alimentazionein fresatura o foratura
4
Le caratteristiche principali sono:•
elevato rendimento (maggiore del 90%)
moto retrogrado
il gioco tra vite e madrevite è molto ridotto (dell’ordine di qualchemicron) e può essere quasi annullato mediante precarico. Questacaratteristica è molto importante, in quanto permette l’uso di trasduttoridi posizione indiretti
per ragioni economiche è più conveniente
misurare la rotazione della vite (tipicamente con un encoder) che lospostamento lineare del braccio. Se il gioco è ridotto gli errori che sicommettono nel controllo dell’asse sono trascurabili
l’eliminazione dell’attrito di strisciamento permette di evitare il fenomenodello stick-slip e di ottenere movimenti continui e dolci a velocitàbassissime
il loro costo è piùttosto elevato, data la precisione con cui sono costruiti iprofili dei filetti della vite e della madrevite
2
5
Metodi diMetodi di Precarico
Precarico
precarico su due punti standard:10% del massimo carico dinamico
precarico su quattro punti standard:4% del massimo carico dinamico• minore ingombro assiale della
madrevite
- è economica e largamente usata,
ma è a volte inadatta a causa dellostrisciamento interno
3
7
Esempio di motore posizionatoin prossimità della base delrobot: Robot
SCARA
con
3
gradi
di mobilità
♦
posizionamento remotodel motore
2
trasmissione
remota composta da unparallelogramma articolato
8
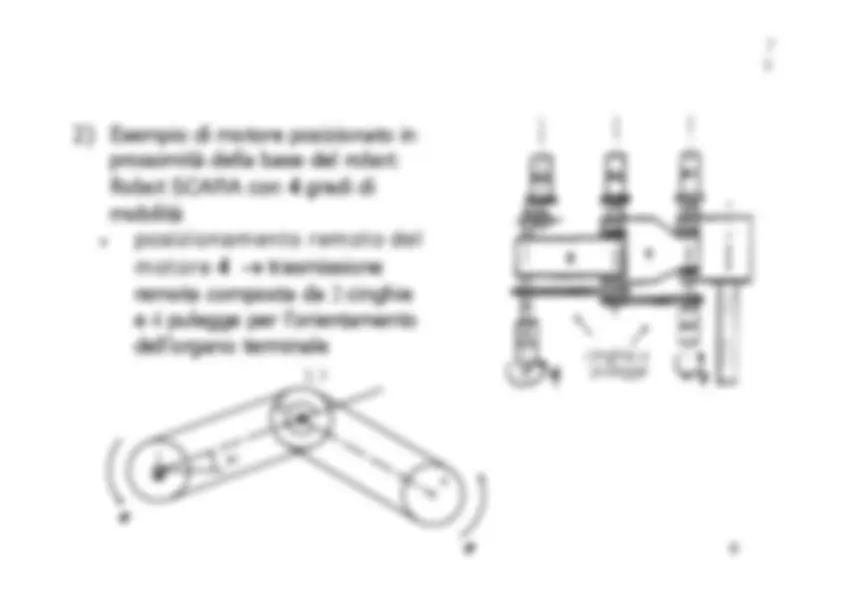
Esempio di motore posizionato inprossimità della base del robot:Robot
SCARA
con
4
gradi di
mobilità
♦
posizionamento remoto delmotore
4
trasmissione
remota composta da
cinghie
e
pulegge per l’orientamento
dell’organo terminale
q
q
1
2
1
2, 3
4
3
cinghie e
pulegge
10
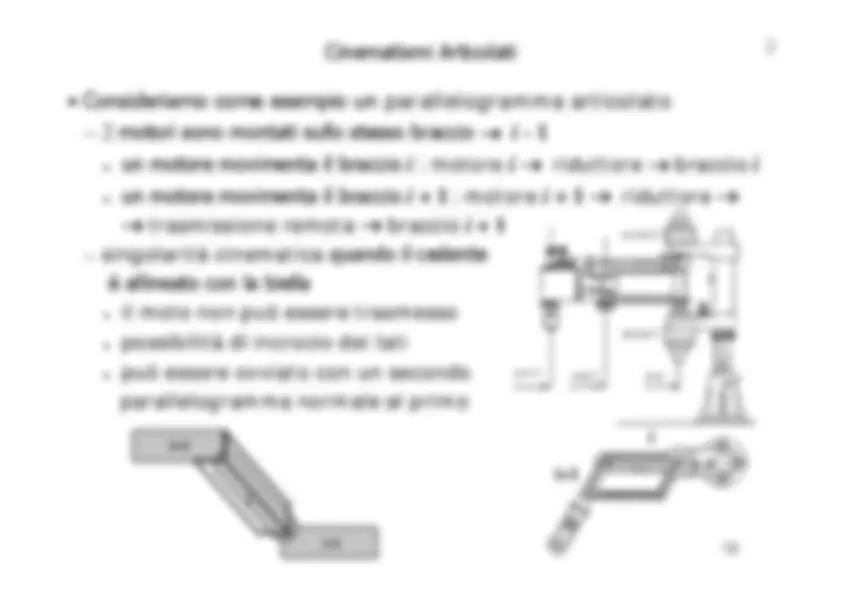
Cinematismi Articolati Cinematismi Articolati
- Consideriamo come esempio un
parallelogramma articolato
motori sono montati sullo stesso braccio
i
- 1
♦
un motore movimenta il braccio
i
motore
i
riduttore
braccio
i
♦
un motore movimenta il braccio
i
motore
i
riduttore
trasmissione remota
braccio
i
singolarità cinematica
quando il cedente
è allineato con la biella
♦
il moto non può essere trasmesso
♦
possibilità di incrocio dei lati
♦
può essere ovviato con un secondo parallelogramma normale al primo
i+
i-
i
i
i+
i-
11
Trasmissioni con Alberi Coassiali Trasmissioni con Alberi Coassiali
Alberi coassiali con ruote dentate coniche calettate
impiegate per
polsi
e
strutture compatte
ogni albero movimenta un asse
l’albero
movimenta
rispetto
a
, gli alberi
e
movimentano
membri successivi
e
una rotazione dell’albero
fa ruotare gli alberi
e
in uscita anche con i
rispettivi ingressi fissi
complicazioni nel controllo
ingresso
uscita
braccio
i
3
1
2
3
1
2
braccio
i
13
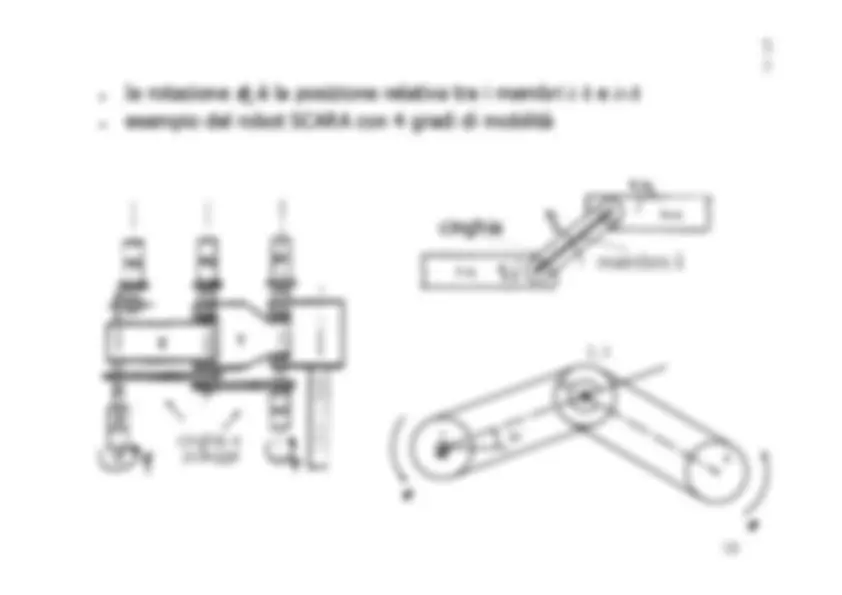
♦
la rotazione
2
è la posizione relativa tra i membri
i
e
i
♦
esempio del robot SCARA con 4 gradi di mobilità
cinghie e
pulegge
membro
i
cinghia
q
q
1
2
1
2, 3
4
Sono impiegati per
ridurre la velocità di rotazione del motore
−
le
velocità dei bracci sono inferiori
a
rad/s
i
motori hanno
comportamento ottimale per velocità superiori
(un valore tipico
del regime di funzionamento è, per esempio,
giri/min
rad/s)
−
rapporti di riduzione bassi
τ
−
vantaggi ♦
ottimizzazione del campo di funzionamento del motore
in
relazione alla coppia motrice e velocità di rotazione
♦
riduzione della coppia motrice
richiesta
♦
abbassamento delle frequenze delle irregolarità periodiche prodotte dal motore
allontanamento dalla frequenza
fondamentale del manipolatore
−
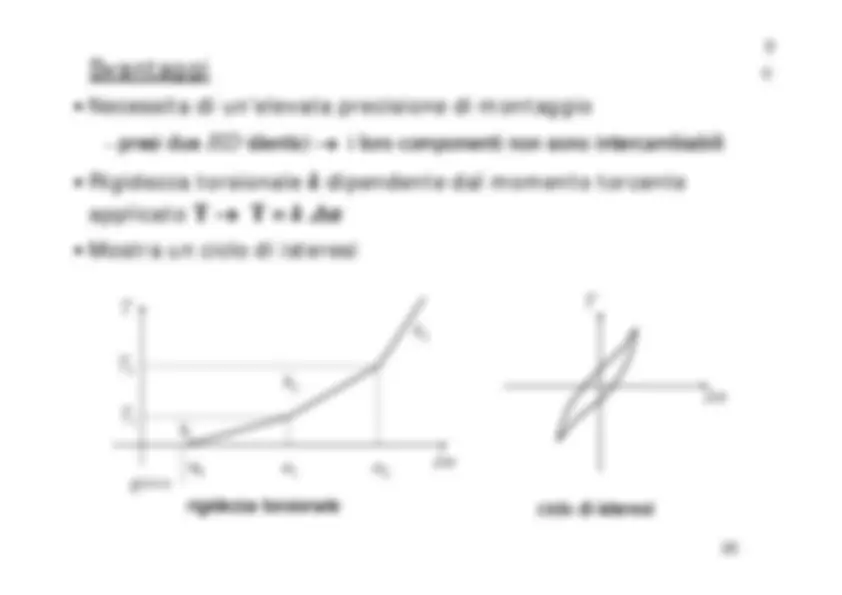
svantaggi ♦
aumento del peso e del carico inerziale
♦
aumento dell’elasticità e dei giochi
vibrazioni
RIDUTTORE DI VELOCIT RIDUTTORE
DI VELOCITÀ
À
16
( )
( )
m
t
t
τ
ϑ
ϑ
τ
=
⇒
&
&
�
in robotica
1
bilancio di potenza sul riduttore:
(
1
)
( )
c t
c t
τ
=
⇒
%
notevole aumento della coppia
adegua la velocità di rotazione ottimale del motore alle variecondizioni di moto del braccio
ϑ
&
m
c
c
ϑ
ϑ
=
&
%
&
potenza in ingresso
potenza in uscita
lato motore
lato carico
τ
ϑ
&
m
c
%
c
rapporto di riduzione costante:
17
nel caso reale il bilancio di potenza si scrive considerando ilrendimento
η
del riduttore
m
c
c
η
ϑ
ϑ
=
&
%
&
0
1
(
(
1
)
)
9
c t
c t
η
η
η
τ
=
⇐
<
<
%
di solito
ϑ
&
lato motore
lato carico
τ, η
ϑ
&
m
c
%
c
m
c
ϑ
&
%
ϑ
&
c
(
)
1
m
c
ϑ
η
−
&
%
19
i motori sentono
carichi inerziali quasi costanti
per la presenza dei
riduttori
il momento d’inerzia sentito dal motore è la somma di
termini
l’inerzia del motore
J
m
costante
l’inerzia della struttura a valle del giunto
varia notevolmente
(si consideri
J
var
(q
i+1, .. ,
q
n
ma è moltiplicata per
τ
2
considerando che i
termini sono confrontabili
le
variazioni globali del momento d’inerzia sono contenute
(
)
2
var
1
,..,
m
i
n
J
J
J
q
q
τ
=
20
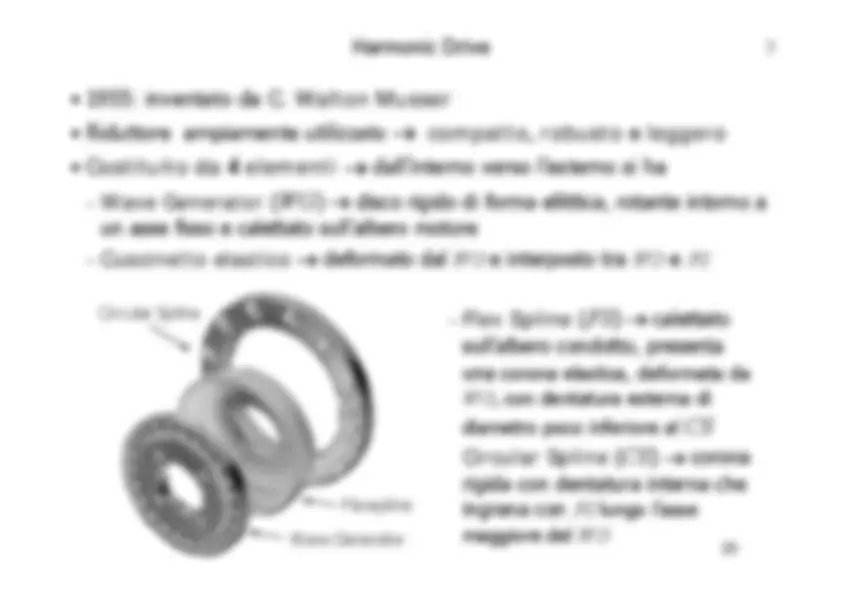
Harmonic Harmonic Drive
Drive
C. Walton Musser
ampiamente utilizzato
→
compatto
robusto
e
leggero
Costituito da
4
elementi
→
dall’interno verso l’esterno si ha
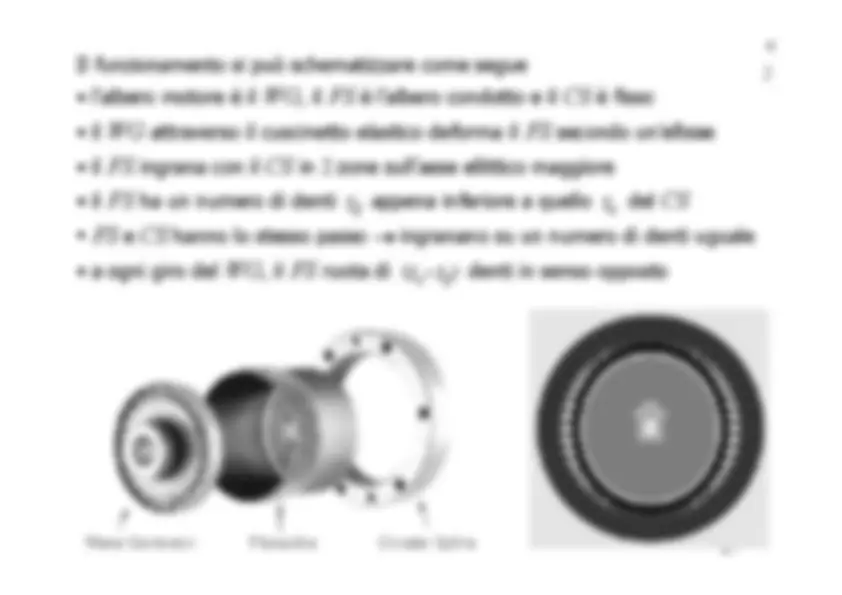
Wave Generator
WG
disco rigido di forma ellittica, rotante intorno a
un asse fisso e calettato sull’albero motore
Cuscinetto elastico
deformato dal
WG
e interposto tra
WG
e
FS
Circular Spline
Flexspline
Wave Generator
Flex Spline
FS
calettato
sull’albero condotto, presentauna
corona elastica, deformata da
WG
con dentatura esterna di
diametro poco inferiore al
CS
Circular Spline
CS
corona
rigida con dentatura interna cheingrana con
FS
lungo l’asse
maggiore del
WG