Scarica Parte 3 - Cinematica e più Dispense in PDF di Meccanica Applicata solo su Docsity!
EQUAZIONI CINEMATICHE PER MANIPOLATORIEQUAZIONI CINEMATICHE PER MANIPOLATORI
Il
manipolatore
si schematizza come un sistema
multicorpo seriale a
catena cinematica aperta
con
^
membri rigidi
connessi da
^
accoppiamenti elementari
prismaticirotoidali
Procedura Procedura
^
ogni terna
i )
è solidale al membro
i
^
ogni giunto
i
collega i membri
i-
e
i
la variabile di giunto
q
i
posizione relativa di
i^
rispetto a
i-
- dipende dall’accoppiamento elementare
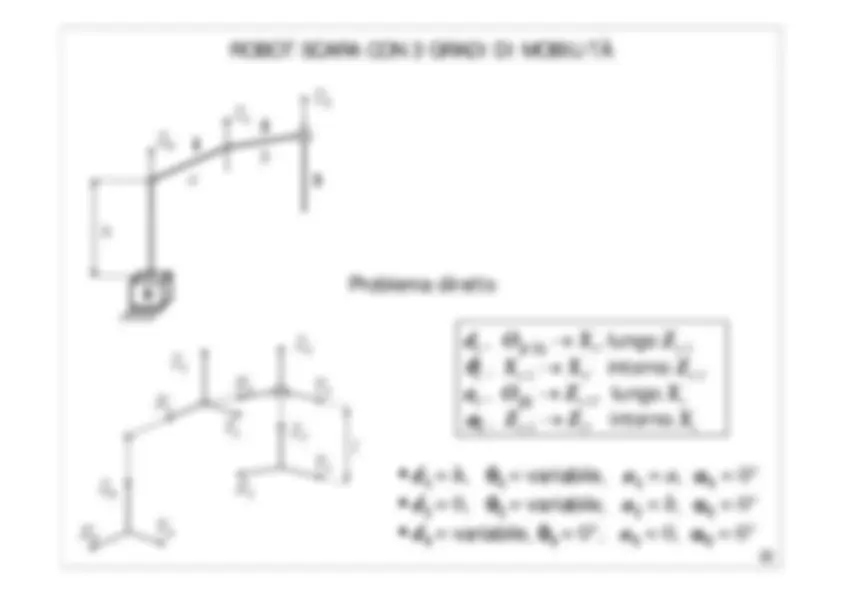
base →
organo terminale
n
prismatico
lunghezza
rotoidale
angolo
i
q^2
q^1
q^ i
q^ n n
( n
i-
Equazioni cinematiche per la posizioneEquazioni cinematiche per la posizione
n n
n n
ii
i i
n^
, 1
1 , 2
1 ,
, 1
12
01
0
M M M M M M M
L
L
Le
equazioni cinematiche
per la
posizione
si scrivono tenendo conto
che la posizione^
relativa tra due membri
i
j
è
ij
^
tra i membri
i
k
, note
le posizioni tra
i
j
e
j
k
,^
è^
ik
Μ ij
jk
^
tra l’organo terminale
n
e la base
è
^
definire una procedura conveniente per scrivere
i-1,i
(q
(0)^ )i^
i
q^2
q 1
q^ i
q^ n n
( n
i-
⎛^ ⎜ ⎝
∑
∑ ∑
∑ ∑
∑
∑ ∑
=
− =
−
−
=
−
−
− =
−
−
=
=
−
=
−
=
−
n i
j k
j k j j k k
n j
i i i i i i n
j k
j j k k
n j
n i
i i
n
i
n i
i i
n
n i
i i
n
q q
q
q
q
1
1 1
0
, 1
0
, 1
2
2 2 0
, 1
0
, 1
(^00)
1 1
0
, 1
0
, 1
2
1
0
, 1
(^00)
1
0
, 1
(^00)
1
0
, 1
(^00)
&^
L
L
L
L
H
W W H H L W
W
W
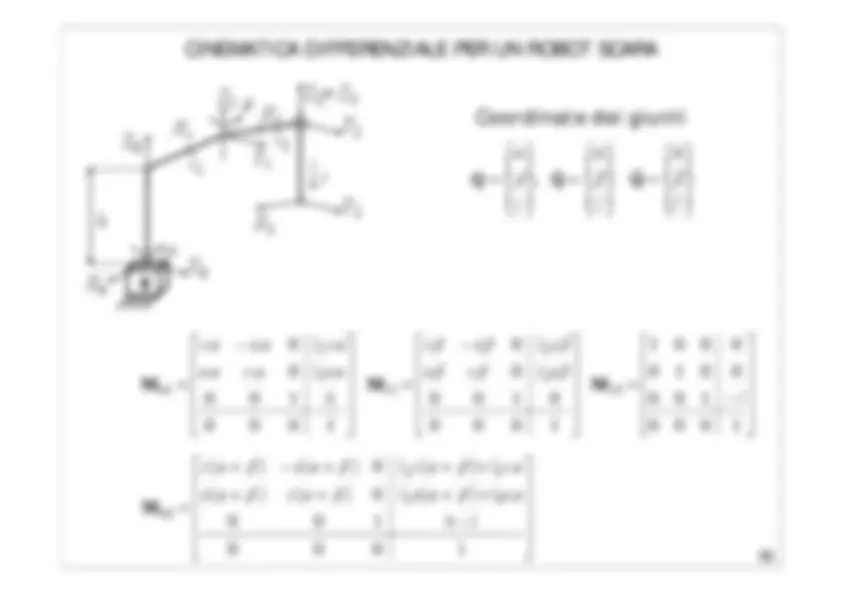
Le equazioni cinematiche per la velocità e l’accelerazione possono assumereuna diversa
forma
usando le le relazioni
( )
( )
( )
( )
( )
2 2
,^
q
q
q^
i
i
i
i
i^
&
&&
&^
L
L
H
L
W
=
=
i
q^2
q^1
q^ i
q^ n n
( n
i-
Posizionamento delle ternePosizionamento delle terne
La matrice
M
i -1,
dipende dalla posizione reciproca delle i
terne
i -1)
i )
e quindi dipende^ ^
dalla
geometria dei membri
^
dal
movimento relativo
tra i membri
i^
i-
^
e quindi dalla
coordinata del giunto
q
i^ che definisce la
posizione
relativa
dei membri
i^
i-
Un
posizionamento adeguato
produce una
semplificazione
di
M
i -1,
i
Conviene quindi stabilire delle
regole di posizionamento delle terne
^
o^
asse
Z
) i
coincidente
con l’asse del giunto
i
tra i membri
i^
i+
^
o^
asse
X
o i
Y
) i
normale
all’asse
Z
i-^1
della terna
i -1)
^
o^
asse
Y
o i
X
) i
terna destra
Consideriamo i membri contigui
i-
i
q
i -
q
i^
q
i +
i-
i+
i
Joint i+
Joint i
i
2
^
d
, i^
offset
, distanza dell’origine di
i -1)
X
, valutata lungo i
Z
i-^1
θ
, i
rotazione
, angolo tra
X
i-^1
X
,^ i
valutata intorno a
Z
i-^1
^
a
, i^
lunghezza del braccio
i
, distanza origine di
i )
Z
i-^1
,^
valutata lungo
X
i
α
, i torsione del braccio
i
, angolo tra
Z
i-^1
Z
,^ i
valutata intorno a
X
i
Parametri di D&H^ Parametri di D&H
Il posizionamento delle terne secondola convenzione esposta definisce dei parametri
che costituiscono la
descrizione geometrica
del robot
I parametri
d
e i^
θ i^
forniscono la
descrizione geometrica del giunto
i
cioè di come i membri
i-
i
sono connessi
I parametri
a
e i^
α
forniscono la i
descrizione geometrica del braccio
i
Joint i+
Joint i
i
3
¾
Per il
giunto elicoidale
i
la
rotazione
modifica
θ
i
la
traslazione
modifica
d
i
La variabile
q
di giunto è i^
unica
e indica l’ampiezza del movimento
relazioni tra la coordinata
del giunto
q
e i^
θ
i^
e^
d
→ i
θ
0 i
valore della rotazione per
q
= 0 i^
^
d
0 i
valore dell’offset per
q
= 0 i
^
stabiliscono la posizione del giunto per
q
= 0 i^
⎧ ⎨ ⎩
=
=
i
i i
i
i
i
i
d
q p
d
rq
0 0 θ
θ
Giunti elicoidali, prismatici e rotoidali^ Giunti elicoidali, prismatici e rotoidali
¾
I parametri
d
e i^
θ
fornendo la i
descrizione del giunto
i
dipendono dalla
posizione del giunto
¾
I parametri
a
e i^
α
fornendo la i
descrizione del braccio
i
sono costanti
Posizionamento delle terne estremePosizionamento delle terne estreme
^
terna
origine coincidente con
l’intersezione tra l’asse
Z
0
e la normale
comune agli assi
Z
0
e^
Z
, con questa 1
scelta
d
1
è sempre nullo;
X
0
e^
Y
0
arbitrari
^
terna
n
)^
origine coincidente con
( n
-^1
)^
e^
Z
n^ parallelo a
Z
n-
1
^
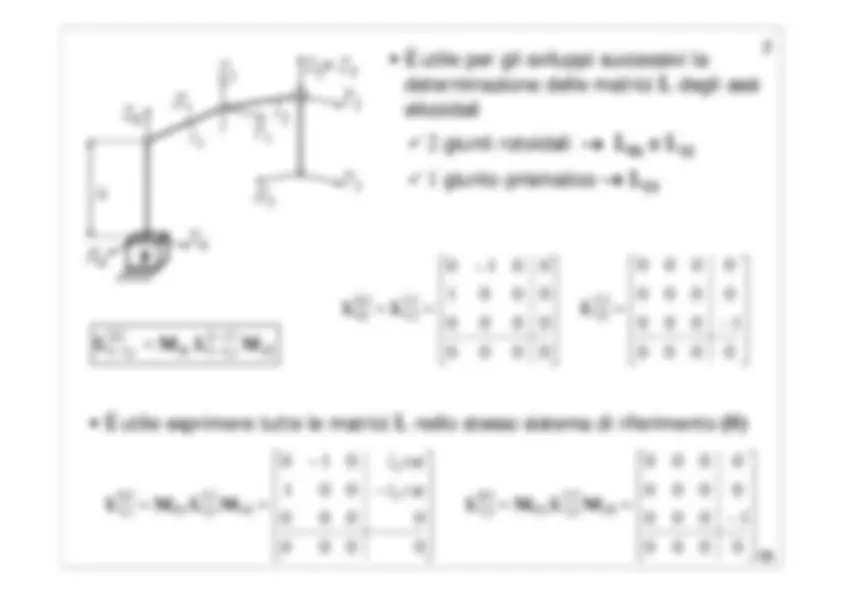
rototraslazioni costanti possono essere aggiunte prima della terna
e
dopo la terna
n
^
nei casi particolari in cui le regole precedenti lasciano delleindeterminazioni si possono effettuare delle scelte a favore dellasemplificazione
Joint i+
Joint i
i
Posizionamento della terna utensilePosizionamento della terna utensile
Anche se non fa esplicitamente parte dellaconvenzione di Denavit e Hartenberg,si riporta una convenzione esistente per lacollocazione della terna utensile
u
la terna utensile
u
)^
si sceglie in relazione al tipo di organo terminale
per un organo di presa tipo
pinza
^
O
u^
centro pinza
^
Z
u^
direzione di
approccio
^
Y
u^
direzione di
scivolamento
^
X
u^
normale a
Z
u^
e^
Y
u^
per formare una
terna destra
ciò comporta che in genere la terna
n
)^
u
)^
si introduce un’ulteriore
matrice di posizione
M
n ,
u^
che però è
costante
( u
O
u
X
u^
Z
u
Y
u
(^
)^ (
)^
(^
)^ (
)
(^
)^ (
)^
(^
)^ (
)
1
1
2
2
1
1
3
3
4
4
1
1
1
0
0
0
0
0
0
1
0
0
0
0
0,
, 0
1
0
0
1
1
0
0
1
0
0
0
0
1
0
0
0
1
1
0
0
0
1
0
0
0,
, 0
1
0
0
1
0
1
0
0
0
1
i^
i
i^
i
i
i z^
i^
i
z
i i
i^
i
i^
i
x^
x
c^
s
s^
c
d^
d a
a
θ^
θ
θ^
θ
θ α ′ −
−
′
′′^
′′′
−^
−
′′^
′′′
−
⎡^
⎤^
⎡^
⎤
⎢^
⎥^
⎢^
⎥
⎡^
⎤^
⎡^
⎤
⎢^
⎥^
⎢^
⎥
=^
=^
=^
=
⎢^
⎥^
⎢^
⎥
⎢^
⎥^
⎢^
⎥
⎣^
⎦^
⎣^
⎦
⎢^
⎥^
⎢^
⎥
⎢^
⎥^
⎢^
⎥
⎣^
⎦^
⎣^
⎦
⎡^
⎤
⎢^
⎥
⎡^
⎤^
⎡
⎢^
⎥
=^
=^
=
⎢^
⎥^
⎢^
⎥
⎣^
⎦^
⎣
⎢^
⎥
⎢^
⎥
⎣^
⎦
R
T
R
T
Q
Q
0
0
R
T
R
T
Q
Q
0
0
1
0
0
0
0
0
0
0
0
0
0
1
i^
i
i^
i
c^
s
s^
c
α
α
α
α
⎡^
⎤
⎢^
⎥
−
⎤^
⎢^
⎥
=
⎢^
⎥^
⎢^
⎥
⎦^
⎢^
⎥
⎢^
⎥
⎣^
⎦
^
Ponendo
e
si scrive i
i
i
i^
c
s
θ
θ
θ
θ
cos
sin
i
i
i
i^
c
s
α
α
α
α
cos
sin
2
3
4
2
1
4
3
1,
2
4
2
3
1
i^
i −
⎡^
⎤^
⎡^
⎤^
⎡^
⎤^
⎡^
⎤^
⎡^
⎤^
⎡^
⎢^
⎥^
⎢^
⎥^
⎢^
⎥^
⎢^
⎥^
⎢^
⎥^
⎢^
⎣^
⎦^
⎣^
⎦^
⎣^
⎦^
⎣^
⎦^
⎣^
⎦^
⎣^
⎡^
⎣^
I^
T
R
I^
T
R
R
T
R
T
M
R
R
R T
T
^
Eseguendo i prodotti si ha
(^
)^ (
)^
(^
)^ (
)^
(^
)^ (
)^
(^
)^ (
)
1
1
1
1
, 1
i
i x
i
i x
i
i z
i
i z
i i^
a
d
′′′ − ′′′
′′ − ′′
′ − ′
−
−^
Q
Q
Q
Q
M
^
Esplicitando le sottomatrici
⎤ ⎥ ⎦
⎡^ ⎢ ⎣
= −^
1
1
3 2
4 2
, 1
0
T T R R R M
i i
⎧ ⎪ ⎪ ⎪⎪⎨ ⎪ ⎪ ⎪ ⎪⎩
⎫ ⎪⎬ ⎪⎭ ⎧ ⎪⎨ ⎪⎩ =
⎤ ⎥ ⎥ ⎥⎦
⎡ ⎢ ⎢ ⎢⎣
−
=
⎫⎪⎬ ⎪⎭ ⎧⎪⎨ ⎪⎩ =
⎤ ⎥ ⎥ ⎥⎦
⎡^ ⎢ ⎢ ⎢⎣
−
=
0 0
0 0
0
0 1
0 0
1
0
0
0 0
3
4
1
2
i
i
i
i
i
i
i
i
i
i
a
c
s
s
c
d
c
s
s
c
T
R
T
R
α
α
α
α
θ
θ
θ
θ
⎤ ⎥ ⎥ ⎥ ⎥ ⎦
⎡ ⎢ ⎢ ⎢ ⎢ ⎣
−
−
= −
1
0
0
0 0
, 1
i
i
i
i i i i i i i i i i i i i i i
i^
d
c
s
s a s c c c s c a s s c s c
α
α
θ α θ α θ θ θ α θ α θ θ M
^
si ottiene la
matrice di
posizione per due terneconsecutive ^
la matrice
M
i -1,
dipende da 4 grandezze i
d
, i^
θ
, i
a
i i
α
i^
mentre la posizione
relativa di
corpi nello spazio dipende da
gradi di libertà
la scelta della
terna
i )
rispetto alla terna
i -1)
è vincolata dalla convenzione di D&H
^
la convenzione di D&H descrive geometricamente un robot con una tabelladei valori di
d
, i^
θ
, i
a
, i^
α
i
←
^0
1
← 3 2
^4
5
←
^6
Posizionamento delle Terne 1^ Posizionamento delle Terne 1
÷÷
^
Z
0
coincidente asse rotoidale tra
^0
e
^1
^
X
0
arbitrario
^
O
O
1
^
gli altri parametri non sono definiti ^
Z
1
coincidente asse rotoidale tra
^1
e
^2
^
X
1
normale al piano di
Z
0 e^
Z
1
^
O
1
intersezione tra
Z
0 e^
Z
1
^
d^1
,
θ^1
variabile
q
1
^
a^1
,
1
⎤ ⎥ ⎥ ⎥ ⎥ ⎦
⎡ ⎢ ⎢ ⎢ ⎢ ⎣
−
−
=
1
0
0
0
0
0
1
0
0
0
0
0
1
1
1
1
01
θ
θ
θ
θ
c
s
s
c
M
X^0
Z^0
Y^0
O
0
terna 0^ X
0
Z^0
Y^0 Z^1
Y^1
O
≡ 0 O
1
X^1 terna 1
−
, 1
i
i
i
i i i i i i i i i i i i i i i
i^
d
c
s
s a s c c c s c a s s c s c
θ α θ α θ θ M
di
,^
O
( i -1)
→
X
,^ i lungo
Z
i-^1
θ i
,^
X
i-^1
→
X
,^ i intorno
Z
i-^1
ai
,^ O
( i )
→
Z
i-^1
,^ lungo
X
i
α
, i Z
i-^1
→
Z
,^ intorno i
X
i
terna 2
Y^1
Z^1
O
1 X^1
Z^2
Y^2
X^2
O
2
d^2
⎤ ⎥ ⎥ ⎥ ⎥ ⎦
⎡ ⎢ ⎢ ⎢ ⎢ ⎣
−
=
1
0
0
0
0
1
0
0
0
0
0
2
2
2
2
2
12
d
c
s
s
c
θ
θ
θ
θ
M
^
Z
2
coincidente asse prismatico tra
^2
e
^3
^
X
2
normale al piano di
Z
1 e^
Z
2
^
O
2
intersezione tra
Z
1 e^
Z
2
^
d^2
d
, 2
θ^2
variabile
q
2
^
a^2
,^
α
2
←
^0
1
← 3 2
^4
5
←
^6
−
, 1
i
i
i
i i i i i i i i i i i i i i i
i^
d
c
s
s a s c c c s c a s s c s c
θ α θ α θ θ M
di
,^
O
( i -1)
→
X
,^ i lungo
Z
i-^1
θ i
,^
X
i-^1
→
X
,^ i intorno
Z
i-^1
ai
,^ O
( i )
→
Z
i-^1
,^ lungo
X
i
α
, i Z
i-^1
→
Z
,^ i intorno
X
i
^
Z
4
coincidente asse rotoidale tra
^4
e
^5
^
X
4
normale al piano di
Z
3 e^
Z
4
^
O
4
intersezione tra
Z
3 e^
Z
4
^
d^4
,
θ^4
variabile
q
4
^
a^4
,^
α
4
⎤ ⎥ ⎥ ⎥ ⎥ ⎦
⎡ ⎢ ⎢ ⎢ ⎢ ⎣
−
−
=
1
0
0
0
0
0
1
0
0
0
0
0
4
4
4
4
34
θ
θ
θ
θ
c
s
s
c
M
terna 4
Z^3
Y^3
X^3
Y^4
Z^4
O^3 X^4
≡ O
4
←
^0
1
← 3 2
^4
5
←
^6
−
, 1
i
i
i
i i i i i i i i i i i i i i i
i^
d
c
s
s a s c c c s c a s s c s c
θ α θ α θ θ M
di
,^
O
( i -1)
→
X
,^ i lungo
Z
i-^1
θ i
,^
X
i-^1
→
X
,^ i intorno
Z
i-^1
ai
,^ O
( i )
→
Z
i-^1
,^ lungo
X
i
α
, i Z
i-^1
→
Z
,^ intorno i
X
i
^
Z
5
coincidente asse rotoidale tra
^5
e
^6
^
X
5
normale al piano di
Z
4 e^
Z
5
^
O
5
intersezione tra
Z
4 e^
Z
5
^
d^5
,
variabile
q
5
^
a^5
,^
α
5
⎤ ⎥ ⎥ ⎥ ⎥ ⎦
⎡ ⎢ ⎢ ⎢ ⎢ ⎣
−
=
1
0
0
0
0
0
1
0
0
0
0
0
5
5
5
5
45
θ
θ
θ
θ
c
s
s
c
M
terna 5
Y^4
Z^4
X^4
O ≡ 4
O Z^55
Y^5
X^5
←
^0
1
← 3 2
^4
5
←
^6
−
, 1
i
i
i
i i i i i i i i i i i i i i i
i^
d
c
s
s a s c c c s c a s s c s c
θ α θ α θ θ M
di
,^
O
( i -1)
→
X
,^ i lungo
Z
i-^1
θ i
,^
X
i-^1
→
X
,^ i intorno
Z
i-^1
ai
,^ O
( i )
→
Z
i-^1
,^ lungo
X
i
α
, i Z
i-^1
→
Z
,^ intorno i
X
i