Scarica Parte 7 - Controllo e più Dispense in PDF di Meccanica Applicata solo su Docsity!
CONTROLLO DEI ROBOT
CONTROLLO DEI ROBOT
Robot con un Grado di Mobilit Robot con un Grado di Mobilità
à
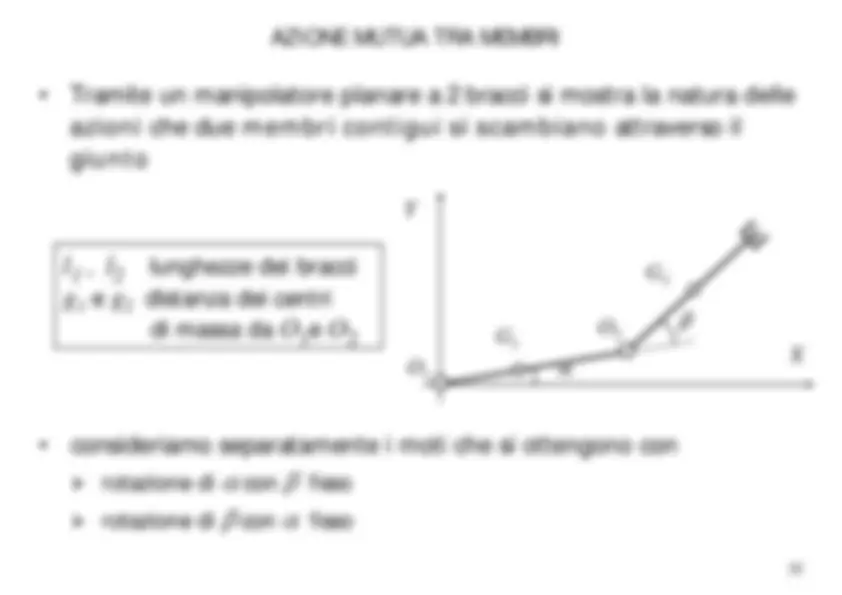
Consideriamo un motore elettrico
DC, brushless o Asincrono
Come trasduttori di posizione angolare analogici, in alternativaall’encoder, si usano il resolver o sensori ad effetto Hall
I riduttori più usati sono gli epicicloidali o l’Harmonic Drive
riduttore
epicicloidale
braccio
dinamotachimetrica
encoder
motore
ϑ
m
ϑ
2
Il controllo di alto livello agisce sulla traiettoria che il robotesegue o sull’interazione con l’ambiente esterno
Agisce sulle variabili di controllo
e
o
C
m
ϑ
ϑ
�
Controllo di alto livello Controllo di alto livello
traiettoria diriferimento
coppia
errore
segnale diforzamento
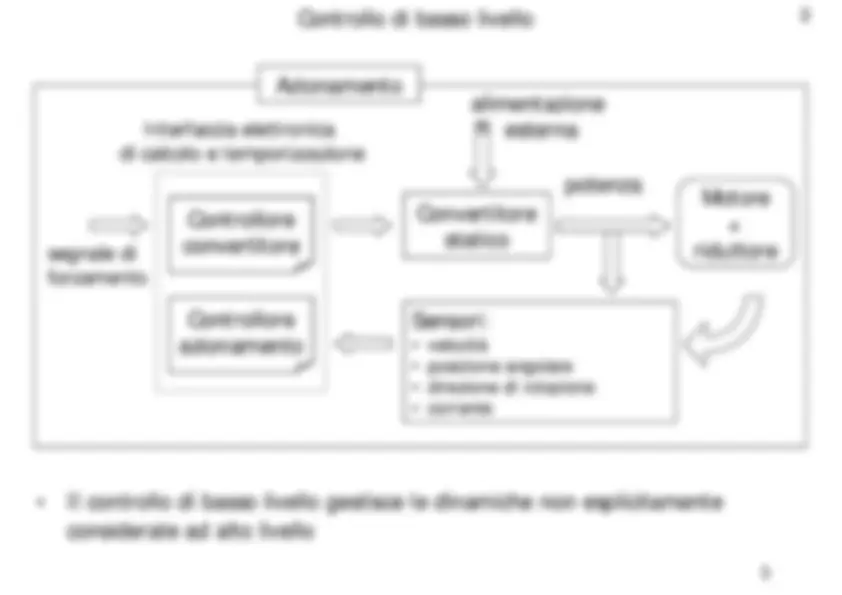
Azionamento
Braccio
Controllore
Moto
alimentazione
esterna
Misura di posizione e
velocità o coppia
4
4
Convertitore Statico
stadio di potenza
raddrizzatori per conversioni
AC/DC, inverter per conversioni DC/AC, Ponte H
Interfaccia elettronica di calcolo e temporizzazione:
PIC (Peripheral Interface Controller)
famiglia di circuiti integrati a
semiconduttore con funzioni di microcontrollore.
DSP (Digital Signal Processor)
microprocessore ottimizzato per eseguire, in
maniera estremamente efficiente, sequenze di istruzioni molto ricorrenti nelcondizionamento di segnali digitalizzati
PLC (Programmable Logic Controller)
Computer industriale componibile
progettato per condizioni gravose di funzionamento, come ampi intervalli ditemperatura, schermato per rumore elettrico, e resistanza a vibrazioni e urti.
Controllore convertitore
invia segnali
PWM
per attivare o interdire i
transistor di cui è costituito il Convertitore statico
Controllore Azionamento
controllo locale realizzato ad esempio con una
funzione di trasferimento Proporzionale Integrale (PI)
5
(
)
(
)
2
( )
( )
( )
( )
( )
( )
a
m
m
m
m
m
m
V
s
k
C
s
s
R
s L
k
C
s
J
s
b
s
C s
⎧
⎛
⎞
=
− Ω
⎪
⎜
⎟
⎝
⎠
⎨ ⎪
=
Ω
⎩
�
Motore
Braccio
Riduttore
( ) ,
( )
( )
m
m
t
t
c t
ϑ
ω
�
( ) ,
( )
( )
t
t
c t
ϑ
ω
( )
( )
( )
( )
m
t
t
c t
c t
ω
τω
τ
=
=
�
in assenza di gravità
e altri disturbi
( )
( )
( )
l
l
c t
J
t
b
t
ϑ
ϑ
=
��
�
con J
l
momento d’inerzia del braccio
b
l
coefficiente d’attrito viscoso
Braccio azionato con Motore DC Braccio azionato con Motore DC
7
I motori in corrente continua e brushless possono essere comandatiin tensione o in corrente cioè
l’amplificatore
A
fornisce al motore
M
una
tensione
corrente
proporzionale a un segnale
u
, in genere una tensione,
fornita dal controllore
C
C
V
a
Ω
m
M
A
I
u
esistono
amplificatori
che
funzionano
in
entrambe
le
modalità
attivando una retroazione di corrente interna. L’abilitazione dellaretroazione consente il comando in corrente
Comando in tensione o in corrente Comando in tensione o in corrente
8
(
)(
)
2
( )
( )
m
a
e
e
s
k
V
s
Ls
R
J s
b
k
Ω
=
equivalentemente per la velocità del braccio
(
)(
)
2
( )
( )
a
e
e
s
k
V
s
Ls
R
J s
b
k
τ
Ω
=
usando i modelli del motore DC + riduttore + braccio si ottiene
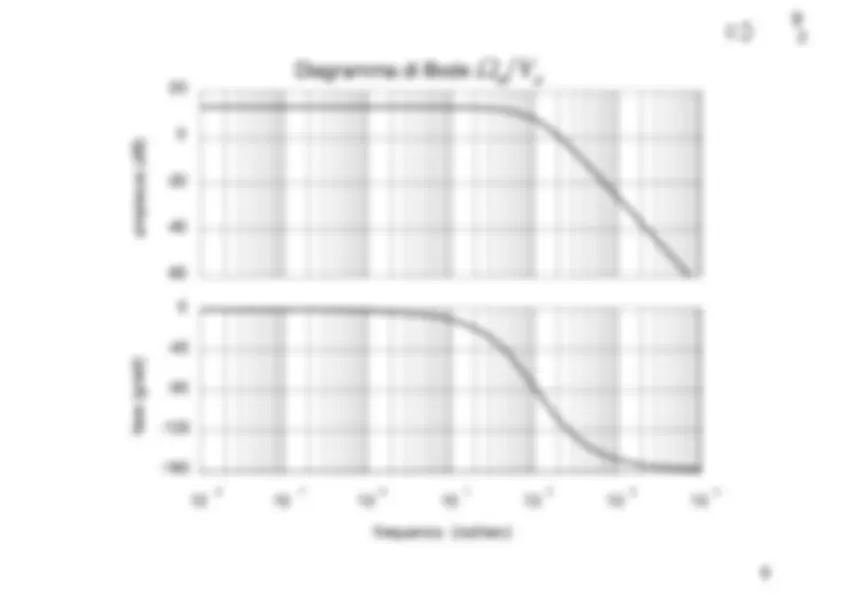
Funzione di trasferimento Funzione di trasferimento
Ω Ω
m m
/ /
V V
a a
10
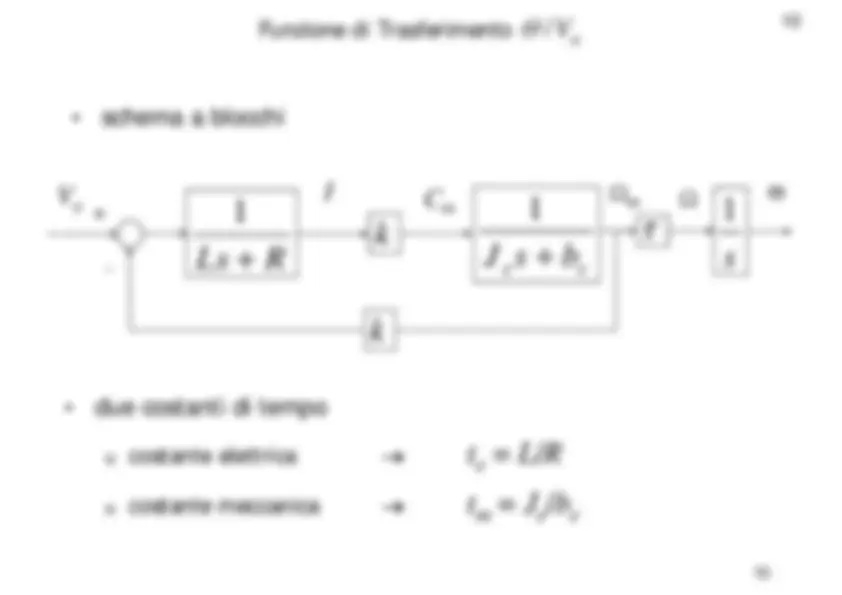
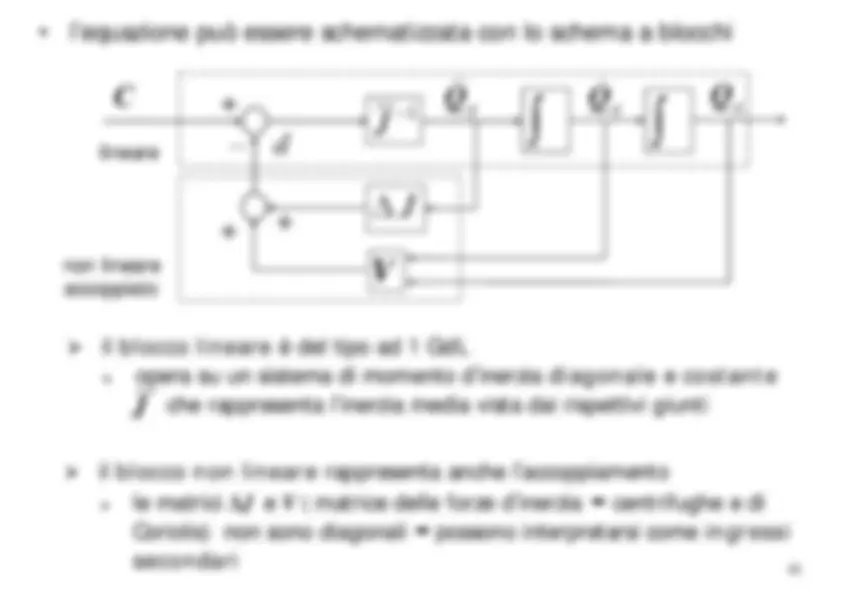
schema a blocchi
due costanti di tempo
costante elettrica
t
e
=
L
/
R
costante meccanica
t
m
=
J
e
/
b
e
V
a
m
I
C
m
1
Ls
R
k
k
1
e
e
J s
b
1
s
τ
Funzione di Trasferimento Funzione di Trasferimento
Θ Θ
/ /
V V
a a
11
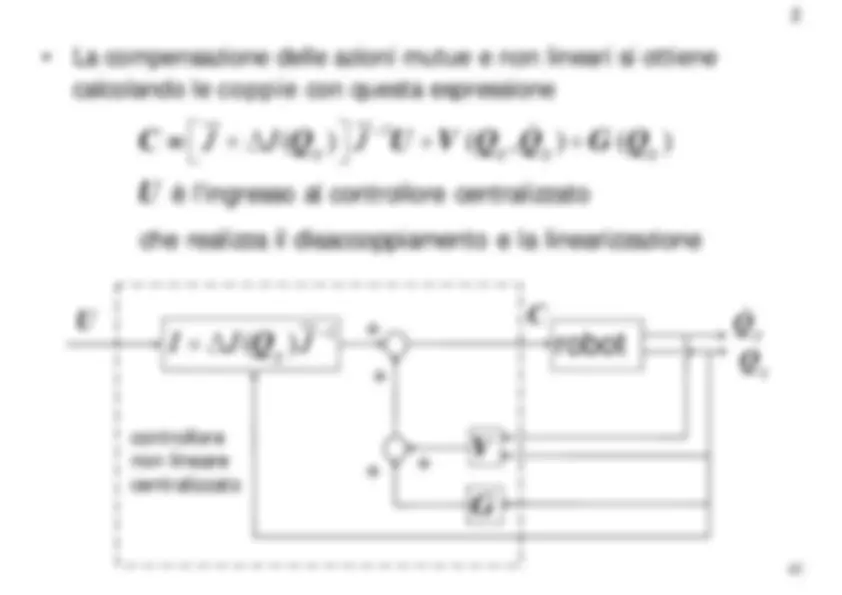
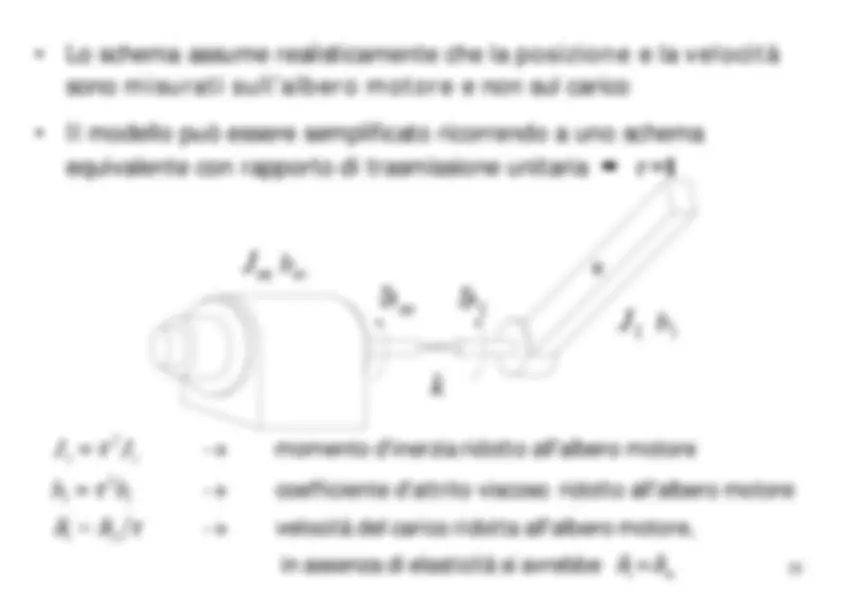
La presenza di riduttori ci consente di considerare un modelloequivalente,
interpretando
la
coppia
resistente
dovuta
al
braccio come un disturbo
V
a
m
I
C
m
1
Ls
R
k
k
1
m
m
J
s
b
1
s
τ
C
(
)
2
( )
( )
( )
( )
( )
m
m
m
m
m
l
m
l
m
c
t
J
t
b
t
J
t
b
t
ϑ
ϑ
τ
ϑ
ϑ
=
��
�
��
�
13
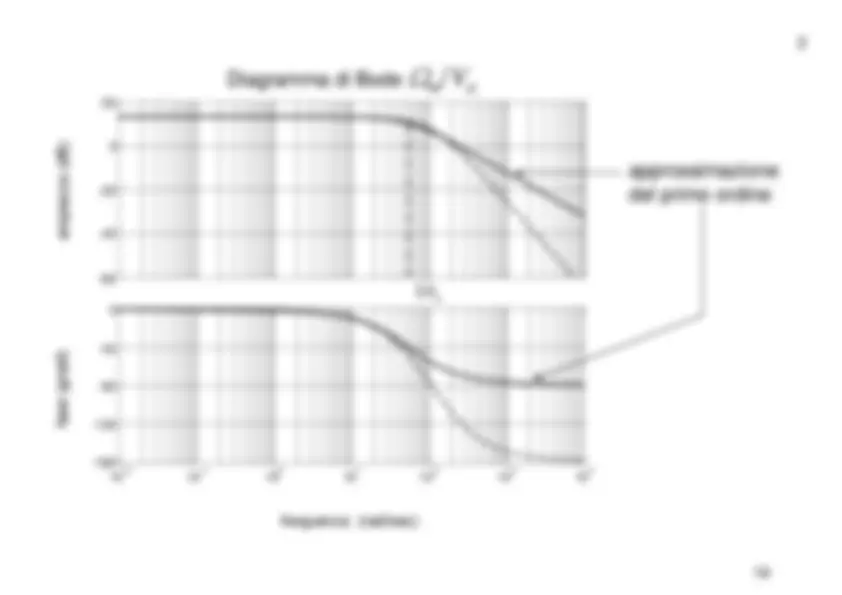
nelle applicazioni spesso
L/R<< J
e
/b
e
(
)
2
( )
( )
a
e
e
s
k
V
s
J R s
b R
k
τ
Ω
≅
V
a
m
k R
k
1
e
e
J s
b
1
s
τ
Funzione di trasferimento Funzione di trasferimento
Ω Ω
mm
/ /
V V
a a
: Approssimazione del Primo Ordine : Approssimazione del Primo Ordine
14
-20 -40 -
0
20
ampiezza (dB)
10
10
10
0
10
1
10
2
10
3
10
4
-135 -
-45 -
0
fase (gradi)
Diagramma di Bode
Ω
m
/
V
a
frequenza (rad/sec)
1/
t
1
approssimazionedel primo ordine
16
16
70 60 50 40 30
ampiezza (dB)
10
10
10
10
0
10
1
-30 -60 -
0
fase (gradi)
Diagramma di Bode
Ω
m
/
I
frequenza (rad/sec)
t
m
17
schema a blocchi
I
m
k
1
e
e
J s
b
1
s
τ
C
m
una costante di tempo
costante meccanica
t
m
=
J
e
/
b
e
I
m
k
1
m
m
J
s
b
1
s
τ
C
m
C
Funzione di trasferimento Funzione di trasferimento
Θ Θ
/ /
I I
19
il comando in tensione implica un controllo sulla velocità
Ω
m
V
a
m
1
e
e
J s
b
k R
k
1
s
τ
il comando in corrente implica un controllo sulla coppia
C
m
I
m
k
1
e
e
J s
b
1
s
τ
C
m
è utilizzato all’interno di un controllo di posizione e di velocitàretroazionato
Motori in Corrente Continua: comando in Tensione o in Corrente Motori in Corrente Continua: comando in Tensione o in Corrente
20
schema a blocchi
m
s
C
m
k
1
e
e
J s
b
1
s
τ
Funzione di Trasferimento Funzione di Trasferimento
Ω Ω
m m
/ /
Ω Ω
s s
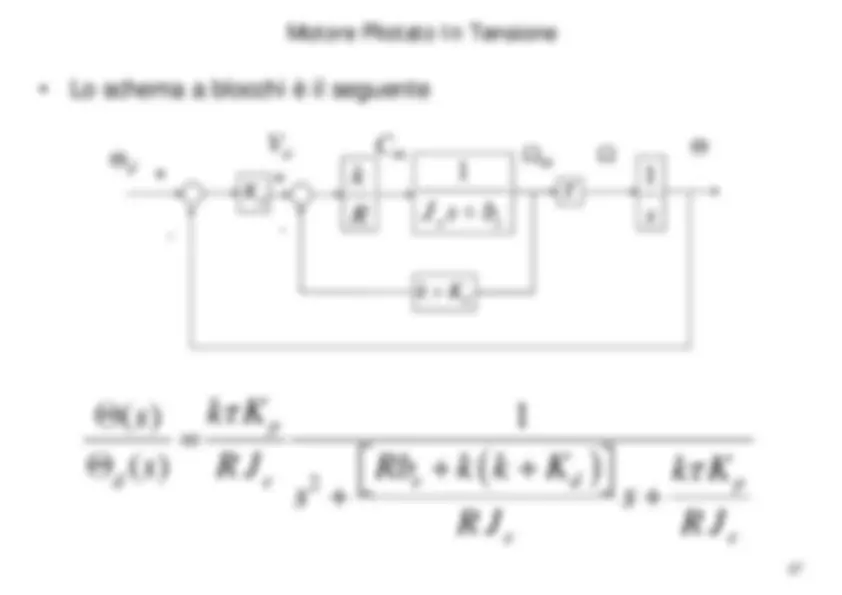
Braccio azionato con Motore Asincrono Braccio azionato con Motore Asincrono
2
2
e
m
l
e
m
l
J
J
J
b
b
b
τ
τ
=
=
(
)
(
)
( )
( )
( )
( )
( )
m
s
m
m
e
e
m
C
s
k
s
s
C
s
s J
b
s
=
Ω
− Ω
=
Ω
con
(
)
( )
( )
e
e
m
s
k
s J
b
k
s
s
Ω
=
Ω
funzionamento equivalente a quello di un motore DC a regime