Baixe Apostila de Robotica e outras Manuais, Projetos, Pesquisas em PDF para Automação, somente na Docsity!
Automação e Robótica II
- 1 Modelagem Cinemática
- 1.1 Modelagem Cinemática para Velocidade
- 1.1.1 Analise de velocidade
- 1.1.2 Cálculo da Jacobiana
- 1.1.2.1 Singularidade
- 1.1.2.2 Cálculo de erros - Cinemática direta 1.1.2.3 Cálculo da velocidade no TCP. - Cinemática inversa 1.1.2.4 Cálculo da velocidade no TCP.
- 1.2 Modelo Dinâmico do Robô
- 1.2.1 Robô com 3 articulações
- 2 Planejamento de Trajetória
- 2.1 Introdução
- 2.1.1 Tipos de movimentos
- 2.1.2 Abordagens para planejamento de trajetórias
- 2.2 Planejamento de trajetórias do TCP
- 2.2.1 Trajetórias no espaço das juntas
- 2.2.1.1 Solução polinomial
- 2.2.1.2 Exemplo
- 2.2.2 Trajetórias retilíneas no espaço cartesiano
- 2.2.3 Geração de trajetórias
- 3 Controle de Sistemas Robóticos
- 3.1 Teoria clássica
- 3.1.1 Controle linear
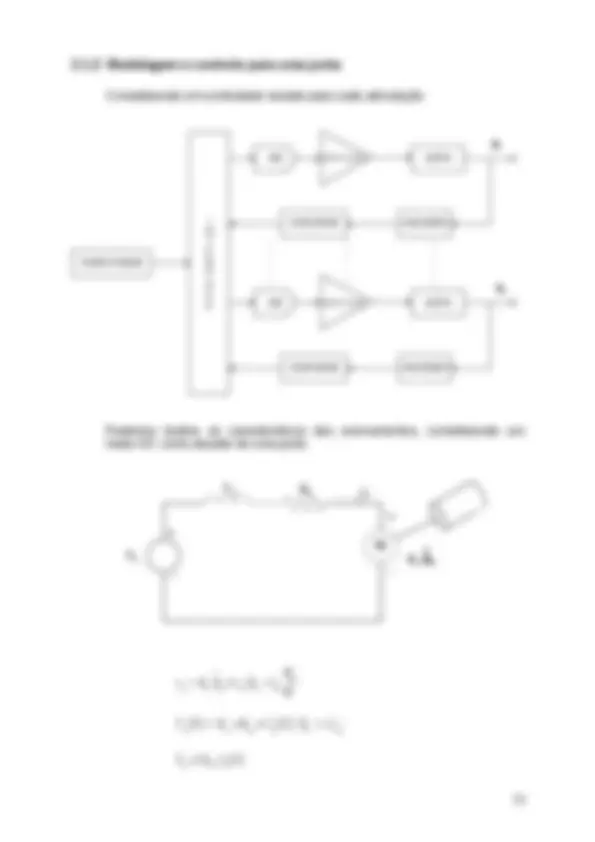
- 3.1.2 Modelagem e controle para uma junta
- 3.1.3 Controle de posição para uma junta
- 3.1.4 Controle não linear
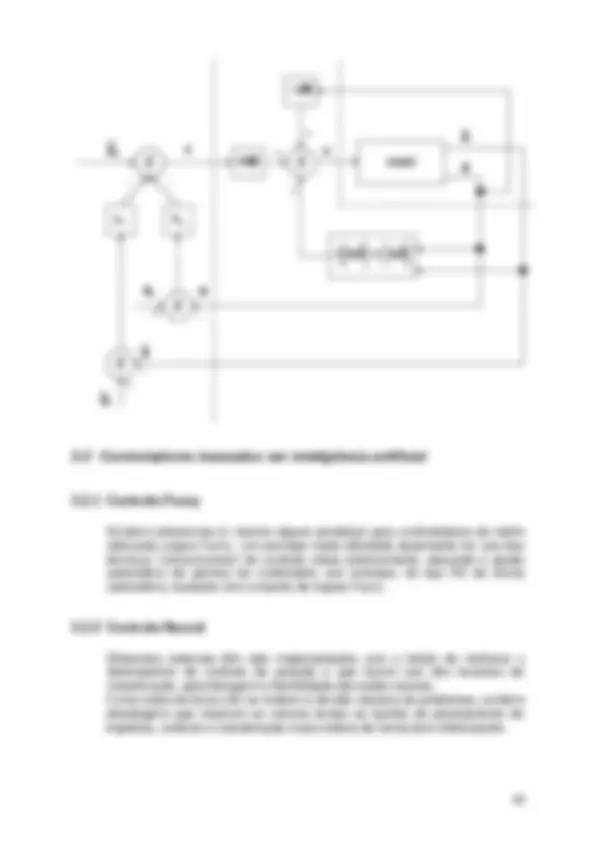
- 3.2 Controladores baseados em inteligência artificial
- 3.2.1 Controle Fuzzy
- 3.2.2 Controle Neural
- 3.2.3 Algoritmos geneticos
- 3.3 Projeto de um controlador PID - da dinâmica da junta 3.3.1 Implementação de um controlador PID a partir
- 4 Programação de Robôs Industriais
- 4.1 Introdução
- 4.2 Programação de robôs
- 4.2.1 Aprendizagem ponto a ponto
- 4.2.2 Programação off-line
- 4.2.2.1 Vantagens da programação off-line
- 4.2.3 Programação on-line
- 4.3 Arquitetura de funcionamento de um robô industrial
- 5 Sensores
- 5.1 Classificação dos sensores
- 5.2 Tipos de sensores
- 5.3 Sensores embarcados
- 5.3.1 Encoders ópticos
- 5.3.2 Resolvers
- 5.3.3 Encoders vs Resolvers
- 6 Bibliografia
Se: r → = [ x y z φ θ ψ ] T d r → dt = (^) [ dx dt dy dt dz dt dφ dt dθ dt dψ dt ]^ T veloc. linear veloc. angular Sendo: r → Posição da extremidade do robô d r → Componentes cinéticas dessa extremidade (velocidade) 1.1.1 Analise de velocidade A velocidade linear de um corpo rígido pode ser definida por: X 0 Y 0 Z 0 X 1 Y 1 Z 1 X 2 Y 2 Z 2 r 0 A 0 A, B V → B =^ V → A +^ ω → A ×^ r → 0 A translação rotação Para calcular a velocidade do elemento terminal com relação à base se deve atribuir um sistema de coordenadas para cada junta
1 2 l 1 l 2 X 0 Y 0 TCP X 1 Y 1 X 2 Y 2 0 A B Aplicando a fórmula da velocidade V → A =^ V → 0 +^ ω → A ×^ r → 0 A [ V (^) Ax V (^) Ay 0 ]
[
0 ]^
[
θ 1 ¿ ]
×
[ l 1 0 0 ] dado rotação translação em Z em X Lembrando que o produto vetorial entre 2 vetores se calcula: a →
[
] b →
[
] a → × b →
i → j → k → i → j →
0 V → A =^ [ cos θ 1 −sen θ 1 0 sen θ 1 cos θ 1 0 0 0 1 ] (^) [
θ ¿ 1 l 1 0 ]
[ − θ ¿ 1 l 1 sen^ θ 1 θ ¿ 1 l 1 cos^ θ 1 0 ] 0 V → B =^ 0 V → A +^ 0 ω → B ×^ r → AB [
V Bx
V By
]
[
¿
1 l 1 sen^ θ 1
¿
1 l 1 cos^ θ 1
]
[
¿
¿ ]
×
[
l 2
]
rotação translação
em Z em X
ω → B ×^ r → AB =^ [ 0 ( θ ¿ 1 +^ θ ¿ 2 )^ l 2 0 ] 0 V →
B =
[
¿
1 l 1 sen^ θ 1
¿
1 l 1 cos^ θ 1
]
[
cos θ 2 −sen θ 2 0
sen θ 2 cos θ 2 0
] (^) [
( θ ¿
1 +^ θ
¿ 2 )^ l 2
] 0 V →
B =
[
¿
1 l 1 sen^ θ 1
¿
1 l 1 cos^ θ 1
]
[ −( θ ¿
1 +^ θ
¿ 2 )^ l 2 sen^ θ 2 ( θ ¿
1 +^ θ
¿ 2 )^ l 2 cos^ θ 2
] 0 V →
B =
[
¿ 1 l 1 sen^ θ 1 −(^ θ ¿
1 +^ θ
¿ 2 )^ l 2 sen^ θ 2
¿ 1 l 1 cos^ θ 1 +^ (^ θ ¿
1 +^ θ
¿ 2 )^ l 2 cos^ θ 2
]
1.1.2 Cálculo da Jacobiana Para determinar as velocidades cartesianas e angulares em relação ao sistema de coordenadas da base do robô se utiliza a seguinte expressão: (^0) v = [ 0 V 0 Ω ]^ = 0 J ( q ) q ¿ q = [ q 1 q 2 . . qn ] sendo q o vetor que define a posição das n juntas do manipulador J a matriz Jacobiana Para a análise da velocidade assume-se: Que a posição é conhecida Que o robô pode ser descrito pelo esquema de Denavit-Hartenberg A matriz Jacobiana relaciona as velocidades linear e angular do TCP expressas no sistema de coordenadas da base com as velocidades das articulações. Sabendo que: r → = [ x y z φ θ ψ ] T vetor posição d r → dt = (^) [ dx dt dy dt dz dt dφ dt dθ dt dψ dt ]^ T Para as n juntas do robô temos: d r → = J d q → sendo J a Jacobiana da função vetorial F
x = l 1 cos θ 1 + l 2 cos ( θ 1 + θ 2 )
y = l 1 sen θ 1 + l 2 sen ( θ 1 + θ 2 )
dx =
∂ ( l 1 cos θ 1 + l 2 cos ( θ 1 + θ 2 ))
∂ θ 1 dθ 1 +
∂ ( l 1 cos θ 1 + l 2 cos ( θ 1 + θ 2 ))
∂ θ 2 dθ 2 dy =
∂ ( l 1 sen θ 1 + l 2 sen ( θ 1 + θ 2 ) )
∂ θ 1 dθ 1 +
∂ ( l 1 sen θ 1 + l 2 sen ( θ 1 + θ 2 ) )
∂ θ 2 dθ 2 dx = − l 1 sen θ 1 θ ¿ 1 −^ l 2 sen^ (^ θ 1 +^ θ 2 )^ θ ¿ 1 −^ l 2 sen^ (^ θ 1 +^ θ 2 )^ θ ¿ 2 dy = l 1 cos θ 1 θ ¿ 1 +^ l 2 cos^ (^ θ 1 +^ θ 2 )^ θ ¿ 1 +^ l 2 cos^ (^ θ 1 +^ θ 2 )^ θ ¿ 2 [ x ¿ y ¿ ] = [ − l 1 sen θ 1 − l 2 sen (^) ( θ 1 + θ 2 ) − l 2 sen (^) ( θ 1 + θ 2 ) l 1 cos θ 1 + l 2 cos (^) ( θ 1 + θ 2 ) l 2 cos (^) ( θ 1 + θ 2 ) ] [ θ ¿ 1 θ ¿ 2 ] sendo J = [ − l 1 sen θ 1 − l 2 sen (^) ( θ 1 + θ 2 ) − l 2 sen (^) ( θ 1 + θ 2 ) l 1 cos θ 1 + l 2 cos (^) ( θ 1 + θ 2 ) l 2 cos (^) ( θ 1 + θ 2 ) ] Quando a Jacobiana é uma matriz quadrada o processo cinemático inverso se efetua calculando J − 1
. Em caso da matriz ter um número de linhas e colunas diferente é necessário montar as equações de cinemática inversa e derivá-las. Este processo é bem difícil.
1.1.2.1 Singularidade. A matriz Jacobiana depende da configuração do robô e permite a determinação de singularidades do robô. Se as relações da cinemática direta forem diferenciáveis (como são praticamente todos os modelos contínuos), então a Jacobiana é sempre definida. Mas a Jacobiana inversa nem sempre pode ficar definida para todos os valores das variáveis de junta, ou seja, para todas as configurações do robô. Quando a matriz Jacobiana tem determinante nulo é singular e a Jacobiana inversa não está definida. Fisicamente, a singularidade é uma configuração do robô na qual seria necessário impor velocidades infinitamente altas numa ou mais juntas para manter determinadas velocidades no espaço operacional. É importante conhecer as configurações singulares do robô pelos seguintes motivos: Causa perda de mobilidade do robô (perda de graus de liberdade) Quando o robô está em uma configuração singular, podem existir infinitas soluções para a cinemática inversa. Quando o robô se aproxima de uma configuração singular, uma pequena velocidade do end-effector, provoca grandes velocidades no acionamento do robô. A partir das equações da cinemática inversa obtém-se: d θ 1 =
cos ( θ 1 + θ 2 )
l 1 sen θ 2 dx +
sen ( θ 1 + θ 2 )
l 1 sen θ 2 dy d θ 2 = −
l 1 cos θ 1 + l 2 cos ( θ 1 + θ 2 )
l 1 l 2 sen θ 2 dx −
l 1 sen θ 1 + l 2 sen ( θ 1 + θ 2 )
l 1 l 2 sen θ 2 dy Quando o ângulo da junta 2 atinge zero graus ( θ 2 = 0 ∘ ) o robô não pode continuar o movimento. Neste caso a velocidade da junta 2 cresce infinitamente.
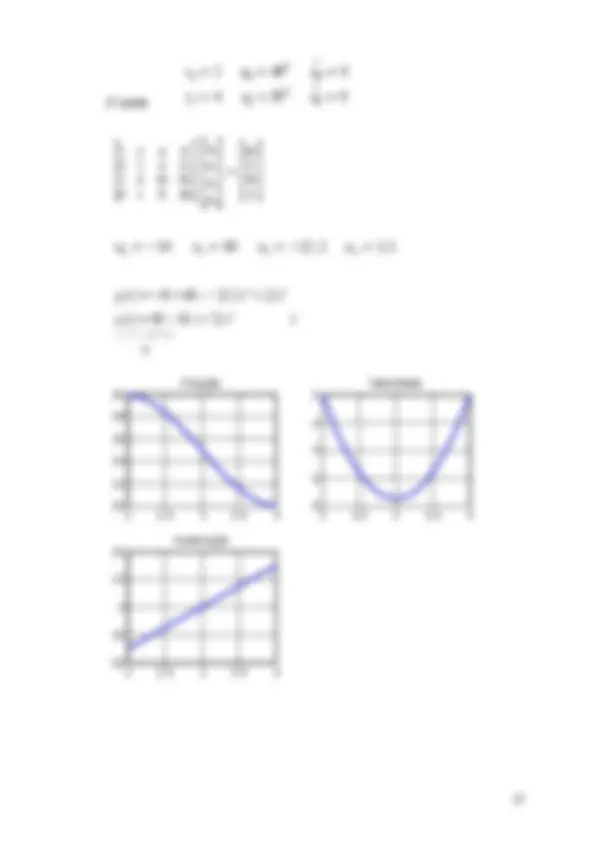
1 2 l 1 l 2 X 1 Y 1 X 2 Y 2 X 0 Y 0 P Calculamos primeiro a posição e orientação do ponto P com relação às coordenadas da base. 0 P = [ x y α ] = [ l 1 cos θ 1 + l 2 cos (^) ( θ 1 + θ 2 ) l 1 sen θ 1
- l 2 sen (^) ( θ 1
- θ 2 ) θ 1 + θ 2 ] = ¿ [ 0,3 cos 20 0
- 0,2 cos (^20 0
- 60 0 ) ¿ (^) ] [ 0,3 sen 20 0
- 0,2 sen (^20 0
- 60 0 ) ¿] ¿ ¿ ¿ ¿ A velocidade é a derivada da posição, então temos:
x
¿
dx
dt
= − l 1 sen θ 1 θ
¿ 1 −^ l 2 sen^ (^ θ 1 +^ θ 2 )^ (^ θ ¿
1 +^ θ
¿ 2 )
y
¿
dy
dt
= l 1 cos θ 1 θ
¿ 1 +^ l 2 cos^ (^ θ 1 +^ θ 2 )^ (^ θ ¿
1 +^ θ
¿ 2 )
¿
¿
1 +^ θ
¿ 2
[ x
y
α
] = ¿ [ − l 1 sen θ 1 − l 2 sen (^) ( θ 1
- θ 2 )^ − l 2 sen (^) ( θ 1
- θ 2 ) l 1 cos θ 1
- l 2 cos (^) ( θ 1
- θ 2 )^ l 2 cos (^) ( θ 1
- θ 2 )^ ¿ ] ¿ ¿ ¿ ¿ ¿ V → = J ⃗ θ ¿ 1 rot min 1 min 60 seg 2 π rad 1 rot
2 π 60 rad / s 1 rpm = 2 π 60 rad / s }
200 rpm = 21 rad / s 100 rpm = 10 , 5 rad / s V → = (^) [
−0,3 sen 200 −0,2 sen ( 200 + 600 ) −0,2 sen ( 200 + 600 )
0,3 cos 20 0
+ 0,2 cos (^20
0
0,2 cos (^20
0
- 60 (^0) ) ] [ 21 10 , 5 ] = [ −0,3 −0, 0 , 32 0 , 034 ]^ [ 21 10 , 5 ]^ = [ −8, 7 ]^ m / s 1.1.2.4 Cálculo da velocidade no TCP. Cinemática inversa Supondo que temos como dado a velocidade nas extremidades do robô e queremos calcular a velocidade nas articulações V → = J ⃗ θ ¿ ⃗ θ ¿ = J −^1 V → para [ x ¿ y ¿ ]
[
0 ]^ m / s [ θ ¿ 1 θ ¿ 2 ] = J −^1 [ 5 0 ]^ = [ 0 , 63 3, − 5 , 95 − 5 , 58 ]^ [ 5 0 ]^ = [ 3 , 15 29 , 7 ]^ rad / s
Para calcular a potencia dos motores de cada junta se utiliza a Jacobina 1 l 1 l 2 X 0 Y 0 TCP m
m = 1 Kg
Peso = m g g → gravidade
9 , 81 m / s
2
F = 9 , 81 N
⃗ F =
[
− 9 , 81 ]^
N
J =
[
0 , 32 0 , 034 ]^
J
T
[
−0,2 0 , 034 ]
[
−0,2 0 , 034 ]^ [
− 9 , 81 ]^
[
− 0 , 333 ]^
N − m
Potência dos motores
P 1 = τ 1 θ
¿
1 =^3 ,^^139 (^3 ,^15 )^ =^9 ,^^887 w
P 2 = τ 2 θ
¿
2 =^0 ,^^333 (^29 ,^^7 )^ =^9 ,^891 w
1.2.1 Robô com 3 articulações Calcular a velocidade do TCP e a potencia dos motores
l 1 = 0,3 m θ 1 = 20
0
¿
1 =^30 rpm
l 2 = 0 , 25 m θ 2 = 70
0
¿
2 =^10 rpm
l 3 = 0,1 m θ 3 = 30
0
¿
3 =^10 rpm
m = 5 kg
1 2 P l 1 l 2 3 l 3 X 0 Y 0 X 1 Y 1 X 2 Y 2 X 3 Y 3 [ x y ]^ = [
l 1 cos θ 1 + l 2 cos ( θ 1 + θ 2 ) + l 3 cos ( θ 1 + θ 2 + θ 3 )
l 1 sen θ 1 + l 2 sen (^) ( θ 1 + θ 2 ) + l 3 sen (^) ( θ 1 + θ 2 + θ 3 ) ] [ x y ]^ = [ 0,3 ( 0 , 94 ) + 0 , 25 ( 0 ) + 0,1 (−0,5 ) 0,3 ( 0 , 342 ) + 0 , 25 ( 1 ) + 0,1 ( 0 , 866 )]^ = [ 0 , 232 0 , 44 ]^ m ⃗ V = [ x ¿ y ¿ ]
⃗ V = J
¿
P 1 = τ 1 θ
¿
1 =^11 ,^^6 (^3 ,^^14 )^ =^36 ,^^42 w
P 2 = τ 2 θ
¿
2 =^ 2,5^ (^1 ,^^05 )^ =^2 ,^63 w
P 3 = τ 3 θ
¿
3 =^ 2,5^ (^1 ,^05 )^ =^2 ,^^63 w
Neste caso como a matriz Jacobiana não é quadrada não podemos inverte-la e a cinemática inversa para velocidade para obter a velocidade das juntas se calcula derivando as expressões de cinemática inversa de posição.
No caso, são dados [^ x^ ,^ y^ ,^ φ^ ]^
T , ou seja, posição e orientação do TCP. Sabendo que φ = θ 1 + θ 2 + θ 3 1 2 P l 1 l 2 3 3 l Px = l 1 cos θ 1 + l 2 cos (^) ( θ 1 + θ 2 ) Py = l 1 sen θ 1 + l 2 sen (^) ( θ 1 + θ 2 )
Px 2 = l 1 2 cos 2 θ 1 + 2 l 1 l 2 cos θ 1 cos (^) ( θ 1 + θ 2 ) + l 2 2 cos 2 ( θ 1 +^ θ 2 ) Py 2 = l 1 2 sen 2 θ 1 + 2 l 1 l 2 sen θ 1 sen (^) ( θ 1 + θ 2 ) + l 2 2 sen 2 ( θ 1 +^ θ 2 )
Px 2
- Py 2 = l 1 2
- 2 l 1 l 2 [ cos θ 1 cos (^) ( θ 1 + θ 2 ) + sen θ 1 sen (^) ( θ 1 + θ 2 ) (^) ] + l 2 2 cos θ 1 cos (^) ( θ 1 + θ 2 ) + sen θ 1 sen (^) ( θ 1 + θ 2 ) = cos (^) [ θ 1 − (^) ( θ 1 + θ 2 ) (^) ] = cos θ 2 Px 2
- Py 2 = l 1 2
- l 2 2
- 2 l 1 l 2 cos θ 2 θ 2 = cos − 1 Px 2
- P (^) y 2 − l 1 2 − l 2 2 2 l 1 l 2 Px = l 1 cos θ 1 + l 2 cos θ 1 cos θ 2 − l 2 sen θ 1 sen θ 2 Py = l 1 sen θ 1 + l 2 cos θ 1 sen θ 2 + l 2 sen θ 1 cos θ 2 cos θ 1 = Px + l 2 sen θ 1 sen θ 2 l 1 + l 2 cos θ 2 sen θ 1 = P (^) y − l 2 cos θ 1 sen θ 2 l 1 + l 2 cos θ 2 cos θ 1 = Px + l 2 sen θ 2 p (^) y − l 2 cos θ 1 sen θ 2 l 1 + l 2 cos θ 2 l 1 + l 2 cos θ 2 cos θ 1 =
Px + ( l 1 + l 2 cos θ 2 ) + P y l 2 sen θ 2 − l 22 cos θ 1 sen^2 θ 2
( l 1 +^ l 2 cos^ θ 2 )
2 cos θ 1 [ l 1 2
- 2 l 1 l 2 cos θ 2 + l 2 2 cos 2 θ 2 ] = Px ( l 1 + l 2 cos θ 2 ) + Py l 2 sen θ 2 − l 2 2 cos θ 1 sen 2 θ 2 cos θ 1 [ l 1 2
- 2 l 1 l 2 cos θ 2 + l 2 2 cos 2 θ 2 + l 2 2 sen 2 θ 2 ] = Px ( l 1 + l 2 cos θ 2 ) + P (^) y l 2 sen θ 2 mas : Px 2
- Py 2 = l 1 2
- l 2 2
- 2 l 1 l 2 cos θ 2 cos θ 1 [ Px 2
- P (^) y 2 ] =^ Px ( l 1 +^ l 2 cos^ θ 2 ) +^ P^ y l 2 sen^ θ 2