



Vibrações
ME77A Professor: Cláudio TAVARES

Estude fácil! Tem muito documento disponível na Docsity

Ganhe pontos ajudando outros esrudantes ou compre um plano Premium

Prepare-se para as provas
Estude fácil! Tem muito documento disponível na Docsity
Prepare-se para as provas com trabalhos de outros alunos como você, aqui na Docsity
Encontra documentos específicos para os exames da tua universidade
Prepare-se com as videoaulas e exercícios resolvidos criados a partir da grade da sua Universidade
Responda perguntas de provas passadas e avalie sua preparação.
Ganhe pontos para baixar
Ganhe pontos ajudando outros esrudantes ou compre um plano Premium
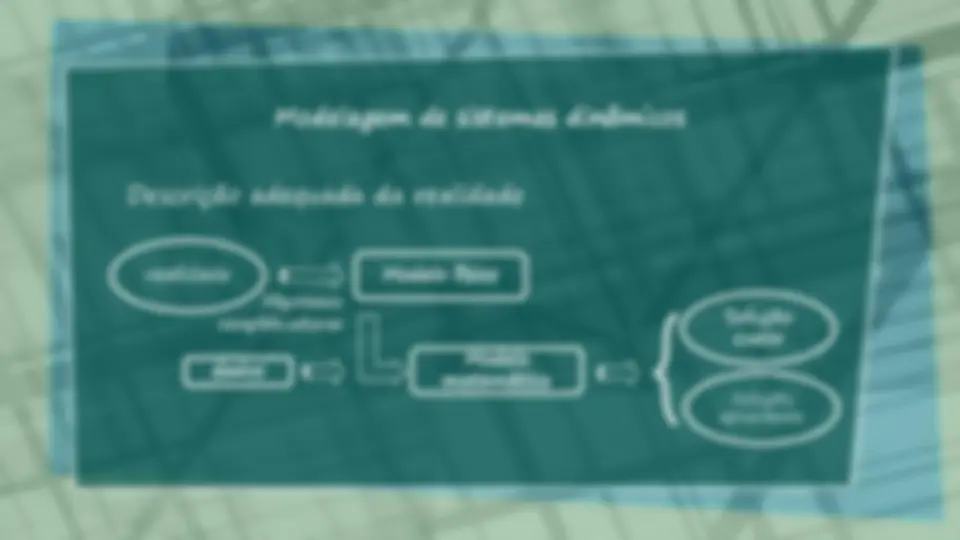
Introdução à apresentação sobre vibrações na engenharia.
Tipologia: Slides
1 / 24

Esta página não é visível na pré-visualização
Não perca as partes importantes!
Professor: Cláudio TAVARES
Abordagem Newtoniana ou Vetorial
Sistemas Dinâmicos Discretos Representação de um sistema físico:
Elemento Elástico Usualmente chamado de “mola”: não possui massa e não dissipa energia 𝑭𝑹 = 𝒌. 𝒖 𝒖 = 𝒖𝟏 − 𝒖𝟐 k: é a rigidez (constante de proporcionalidade)
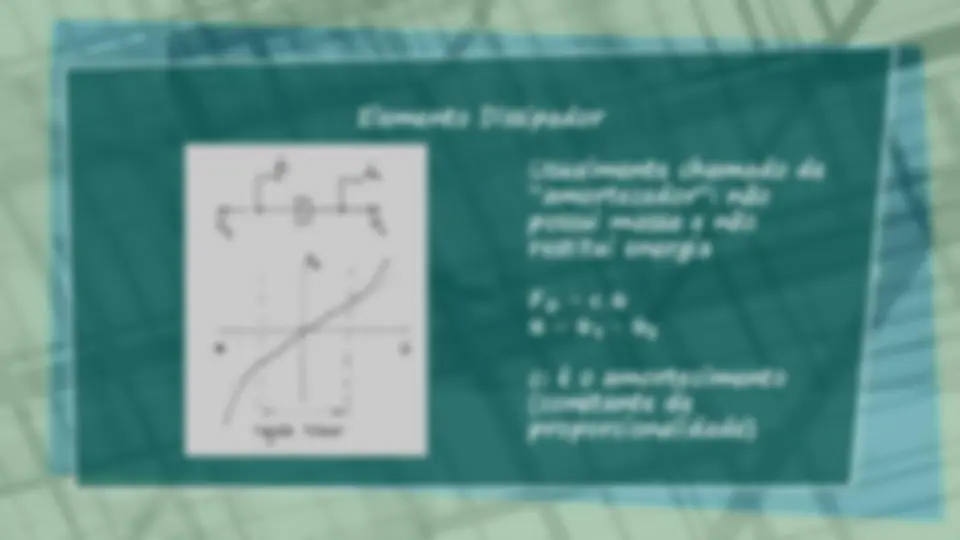
Elemento Dissipador Usualmente chamado de “amortecedor”: não possui massa e não restitui energia 𝑭𝑫 = 𝒄. 𝒖 𝒖 = 𝒖𝟏 − 𝒖𝟐 c: é o amortecimento (constante de proporcionalidade)
Sistemas Dinâmicos Discretos Oscilador Linear Diagrama de corpo livre (abordagem newtoniana) 𝑭𝑹 = k.u 𝑭𝑫 = 𝒄. 𝒖
Sistemas Dinâmicos Discretos Condição de equilíbrio dinâmica (princípio de D’Alambert) 𝑭 𝒕 − 𝒎𝒖 − 𝑭𝑹 − 𝑭𝑫 = 𝟎 𝒎𝒖 + 𝒄𝒖 + 𝒌𝒖 = 𝑭 𝒕 equação de movimento EDO de 2ª ordem
Sistemas Dinâmicos Discretos Conservação da Energia Total (abordagem lagrangeana) Equação de Lagrange para 1 gdl 𝒅𝓛 𝒅𝒕
𝑵 Onde 𝑭 𝑵 = 𝑭 𝒕 − 𝒄 𝒖 , que representa as forças não conservativas
Sistemas Dinâmicos Discretos Conservação da Energia Total (abordagem lagrangeana) 𝝏𝓛 𝝏𝒖
Movimento Oscilatório
Movimento Oscilatório
Movimento Oscilatório Representação complexa (fasor) 𝑧 = 𝐴𝑒 𝑖𝜃 = 𝐴 cos 𝜃 + 𝑖 sin 𝜃: 𝜃 = 𝜔𝑡 𝑅𝑒 𝑧 = A cos 𝜔𝑡 𝐼𝑚 𝑧 = A sin 𝜔𝑡 Para 2 movimentos harmônicos, mas com diferença de fase igual a φ, temos 𝑧 1 = 𝐴 1 𝑒 𝑖𝜔𝑡 e 𝑧 2 = 𝐴 2 𝑒 𝑖𝜔𝑡+𝜙
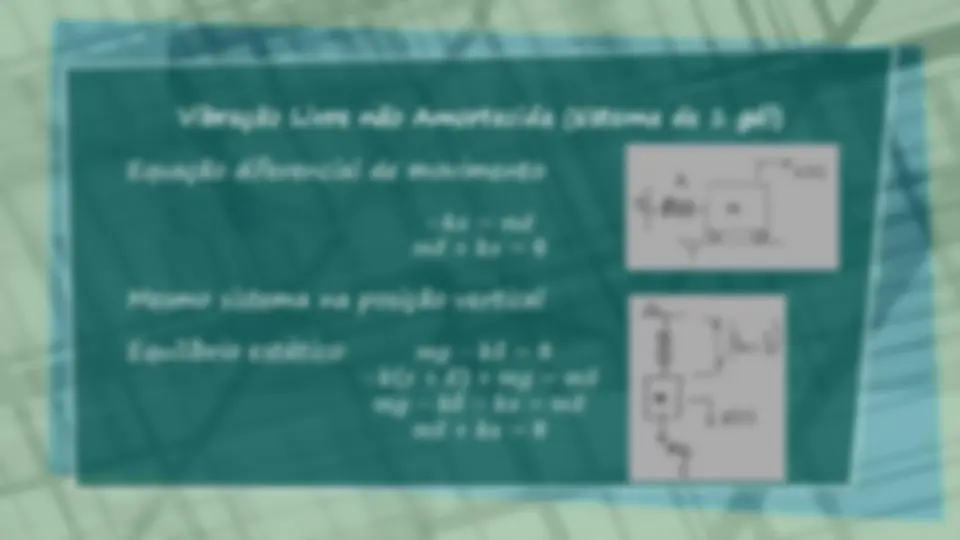
Vibração Livre não Amortecida (sistema de 1 gdl) Equação diferencial de movimento −𝑘𝑥 = 𝑚𝑥 𝑚𝑥 + 𝑘𝑥 = 0 Mesmo sistema na posição vertical Equilíbrio estático: 𝑚𝑔 − 𝑘𝛿 = 0 −𝑘 𝑥 + 𝛿 + 𝑚𝑔 = 𝑚𝑥 𝑚𝑔 − 𝑘𝛿 − 𝑘𝑥 = 𝑚𝑥 𝑚𝑥 + 𝑘𝑥 = 0