Baixe Hidrostatica e outras Notas de estudo em PDF para Engenharia Naval, somente na Docsity!
ESCOLA POLITÉCNICA DA
UNIVERSIDADE DE SÃO PAULO
Departamento de Engenharia Naval e Oceânica
E SPECIALIZAÇÃO EM
E NGENHARIA N AVAL
Módulo 2: Hidrostática
PROF. DR. MARCELO RAMOS MARTINS
([email protected])
Material de apoio ao curso oferecido na Universidade de Pernambuco – UPE
Especialização em Engenharia Naval
1 15/01/2007 Texto original Versão Data Observações Apostila:
ESPECIALIZAÇÃO EM ENGENHARIA N AVAL
Módulo 2: Hidrostática Dept./Unidade Data Autor PNV/EPUSP 2007 Prof. Dr. Marcelo Ramos Martins Curso oferecido pela Escola Politécnica da Universidade de São Paulo na Escola Politécnica da Universidade de Pernambuco
- Introdução............................................................................................... ÍNDICE
- 1.1 Estrutura do Curso de Especialização em Engenharia Naval...........
- 1.2 Programação do Módulo 2: Hidrostática
- Conceitos Básicos
- 2.1 Centro de Gravidade.........................................................................
- 2.1.1 Exercícios resolvidos
- 2.1.2 Exercícios propostos................................................................
- 2.2 Momento de Inércia
- 2.2.1 Exercícios resolvidos
- 2.2.2 Exercícios propostos................................................................
- 2.3 Pressão Hidrostática e Empuxo
- 2.3.1 Exercícios resolvidos
- 2.3.2 Exercícios propostos................................................................
- 2.4 Deslocamento e Centro de Carena.................................................
- 2.4.1 Exercício resolvido...................................................................
- 2.4.2 Exercícios propostos................................................................
- 2.5 Condição de Equilíbrio de Corpos Flutuantes.................................
- Plano de Linhas....................................................................................
- 3.1.1 Exercícios propostos................................................................
- Estabilidade Inicial
- 4.1 Momento de restauração e braço de endireitamento......................
- 4.2 Estabilidade Inicial
- 4.2.1 Exercícios resolvidos
- 4.2.2 Exercícios propostos................................................................
- 4.3 Teste de Inclinação Especialização em Engenharia Naval
- 4.3.1 Exercícios propostos................................................................
- 4.4 Efeito de superfície livre..................................................................
- 4.4.1 Exercício resolvido...................................................................
- 4.4.2 Exercícios propostos................................................................
- Curvas Hidrostáticas
- 5.1 Propriedades Hidrostáticas
- 5.1.1 Obtenção Esquemática das Propriedades Hidrostáticas
- 5.1.2 Exercícios resolvidos
- 5.1.3 Exercícios propostos................................................................
- 5.2 Correção do deslocamento devido ao trim......................................
- 5.2.1 Exercício resolvido...................................................................
- 5.2.2 Exercícios propostos................................................................
- 5.3 Curvas de Bonjean..........................................................................
- Estabilidade Intacta
- 6.1 Trajetória do centro de carena e do metacentro
- 6.2 Curvas Cruzadas de Estabilidade
- 6.2.1 Exercícios propostos................................................................
- 6.3 Curva de estabilidade estática (CEE)
- 6.3.1 Exercícios propostos................................................................
- 6.4 Correção devido à posição do Centro de Gravidade
- 6.5 Efeito de superfície livre..................................................................
- 6.5.1 Exercícios propostos..............................................................
- 6.6 Estabilidade dinâmica
- 6.6.1 Exercícios propostos..............................................................
- Adição e Remoção de Pesos
- Estabilidade Avariada Especialização em Engenharia Naval
- 8.1 Método da perda de flutuabilidade
- 8.1.1 Etapa 1: Determinação do calado médio final
- e da inclinação transversal depois do alagamento 8.1.2 Etapa 2: Determinação da altura metacentrica transversal
- e da inclinação longitudinal depois do alagamento................ 8.1.3 Etapa 3: Determinação da altura metacentrica longitudinal
- Critérios de Estabilidade
- 9.1 International Maritime Organization (IMO)
- 9.2 U.S. Navy......................................................................................
- 9.2.1 Vento e Ondas:
- 9.2.2 Içamento de Pesos ao Lado do Navio:
- 9.2.3 Curvas em Alta Velocidade....................................................
- Referências Bibliográficas
- Apêndice I: Procedimentos numéricos de integração
- Regra do trapézio
- Primeira Regra de Simpson.....................................................................
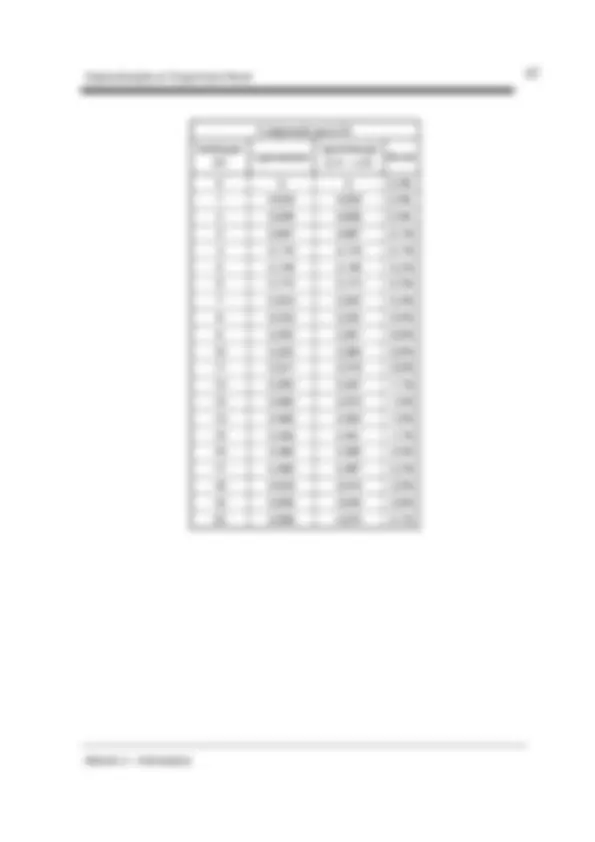
- Apêndice II: Exemplo de Tabela de Cotas...............................................
Especialização em Engenharia Naval
1.2 Programação do Módulo 2: Hidrostática
O presente material foi elaborado para auxílio ao Módulo 2 – Hidrostática, do Curso de Especialização em Engenharia Naval e Oceânica, cujo objetivo é capacitar o aluno a analisar a estabilidade estática, intacta ou avariada, de uma embarcação.
Para tanto, inicia-se com a apresentação de conceitos básicos necessários como a definição do centro de gravidade, pressão hidrostática, empuxo e condições de equilíbrio de corpos flutuantes. Estes conceitos são fundamentais para o desenvolvimento dos capítulos seguintes.
Em seguida, é tratada a representação usual da geometria do navio, o plano de linhas. Esta etapa é fundamental para o desenvolvimento de muitos dos tópicos seguintes.
A estabilidade de corpos flutuantes é abordada em etapas. Inicialmente é estudada a estabilidade na condição inicial, ou seja, sem banda ou trim. Nesta etapa apresenta-se o momento restaurador, o braço de endireitamento e sua dependência em relação à geometria submersa do corpo. Ainda neste capítulo são abordados os temas Teste de Inclinação e Efeito de Superfície Livre na condição inicial.
Antes de se aprofundar o tema Estabilidade , em direção à Estabilidade Intacta , que trata da condição de estabilidade da embarcação intacta em função dos ângulos de banda e trim, e da Estabilidade Avariada , são apresentadas e discutidas as curvas hidrostáticas.
Por fim apresentam-se critérios de estabilidade gerais que devem ser considerados para embarcações e sistemas oceânicos.
O texto apresentado neste material é uma extração de conteúdos básicos das referências citadas no capítulo 10 - Referências Bibliográficas.
Especialização em Engenharia Naval
A carga horária deste segundo módulo será de 30 (trinta) horas-aula, de acordo com a seguinte programação:
Data Período Horários Assunto 18:30h – 19:20h Apresentação: Professor, alunos, e módulo 2 docurso 19:20h – 20:10h Conceitos Básicos 20:10h – 21:00h Conceitos Básicos 18/01/2007Quinta-feira
Noite 21:00h – 21:50h Conceitos Básicos 18:30h – 19:20h Plano de Linhas 19:20h – 20:10h Estabilidade Inicial 20:10h – 21:00h Teste de Inclinação 19/01/2007Sexta-feira
Noite 21:00h – 21:50h Efeito de Superfície Livre na condição inicial 08:00h – 08:50h 08:50h – 09:40h Curvas Hidrostáticas Manhã 09:40h – 10:10h 10:10h – 11:00h Estabilidade Intacta 13:00h – 13:50h Estabilidade Intacta 13:50h – 14:40h
20/01/2007Sábado Tarde 14:40h – 15:30h Exercícios 18:30h – 19:20h 19:20h – 20:10h Realização da 1ª. Avaliação 20:10h – 21:00h 25/01/2007Quinta-feira
Noite 21:00h – 21:50h Adição e Remoção de Pesos 18:30h – 19:20h 19:20h – 20:10h Adição e Remoção de Pesos 20:10h – 21:00h 26/01/2007Sexta-feira
Noite 21:00h – 21:50h Estabilidade Avariada 08:00h – 08:50h 08:50h – 09:40h Estabilidade Avariada Manhã 09:40h – 10:10h 10:10h – 11:00h Critérios de Estabilidade 13:00h – 13:50h 13:50h – 14:40h Exercícios
27/01/2007Sábado Tarde 14:40h – 15:30h Apresentação da 2ª. Avaliação
Especialização em Engenharia Naval
2.1 Centro de Gravidade
O estudo da estática^1 e dinâmica^2 de sistemas de partículas e corpos rígidos requer de um modo geral a determinação do centro de gravidade e/ou centro geométrico destes corpos e do sistema de forças que atua neste corpo, para posterior aplicação das leis da mecânica que regulam o equilíbrio estático e o movimento (cinemática) dos mesmos.
Para estes estudos, em geral, o sistema de forças é reduzido a uma resultante aplicada em um determinado ponto, por exemplo, na origem do sistema de coordenadas, mais um binário que é a soma dos momentos atuantes no corpo, em relação ao ponto escolhido.
No caso de corpos submetidos à ação de um campo gravitacional, os mesmos ficam submetidos a um sistema de forças distribuídas proporcional à massa do corpo. Neste caso, existe um ponto onde se pode aplicar a resultante deste sistema de forças distribuídas tal que o momento resultante destas forças é nulo, qualquer que seja a posição deste corpo no campo gravitacional. Este ponto é chamado de centro de gravidade ou centro de massa do corpo.
O cálculo deste centro pode ser feito através de cálculo integral ou de somatória numérica, dependendo da distribuição de massa e geometria do corpo. Quando a distribuição de massa é uniforme e a geometria pode ser descrita por equações simples, este cálculo integral pode ser realizado facilmente.
Considere, por exemplo, a placa plana, de espessura desprezível, da Figura 1.
(^1) Estudo das situações em que a resultante das forças e momentos atuantes é nula. (^2) Estudo das causam e efeito das forças e momentos cuja resultante é diferente de zero.
Especialização em Engenharia Naval
Figura 1: Determinação do momento da coordenada MY
Sendo g a aceleração da gravidade, a placa com densidade de massa uniforme e
igual a ρ a e A a área da superfície da placa, o peso da placa ( PP ) da figura pode
ser expresso por:
PP =δ∫ A g ⋅ρ (^) a ⋅ dA = g ⋅ρ a ⋅ δ ∫ AdA (2.1)
e o momento na direção do eixo vertical Y da seguinte forma:
MY =δ∫ A x ⋅ g ⋅ρ (^) a ⋅ dA = g ⋅ρ a ⋅ δ ∫ Ax ⋅ dA (2.2)
Assim, a posição da reta vertical de momento nulo está a uma distância (ver Figura 2) tal que:
∫
∫ ⋅ = = A
A P
Y dA
x dA P x M δ
δ (^) (2.3)
Figura 2: Determinação da coordenada x
X
Y x^ PP
X
Y dA x dy
Área A
dx
Campo gravitacional
Especialização em Engenharia Naval
As integrais M (^) X e M (^) Y são chamadas de Momento Estático, ou primeiro momento de área, em relação a um dado sistema de coordenadas.
Quando a forma plana é composta pela união de formas planas simples é possível calcular o centro geométrico somando-se os momentos estáticos das formas simples e dividindo-se pela área total, ou seja:
∑^ ∑
∑
= =
=
N i i
Y X N Y i i
N X i i A A
A
y M A x M M x A
M y A
1 1
1
onde N é o número de formas simples, ( xi ; yi ) e Ai , respectivamente, as
coordenadas do centro de massa da forma simples i e sua área. Assim, as coordenadas da forma composta podem ser obtidas a partir da média ponderada das coordenadas dos centros de massa de suas partes, considerando a área de cada parte como sendo os pesos.
Para um corpo tridimensional, as coordenadas do centro de gravidade ( x , y , z )
podem ser obtidas de forma análoga considerando a integral em todo o volume ( V ) do corpo em substituição à integral na área ( A ). Assim, o centro geométrico (centróide) de um corpo tridimensional pode ser encontrado a partir do cálculo do “primeiro momento de volume” ou momento estático de um volume em relação aos eixos coordenados, ou seja:
∑
∫ ∑ ∫
∫
∑
∫ ∑ ∫
∫
=
=
=
=
N i xz i
N V V i i xz i
N i yz i
N V V i i yz i
A y
y A y V
y dV dV
y dV y
A x
x A x V
x dV dV
x dV x
i
i
i
i
1
1
1
1
δ δ
δ δ
(2.7)
Especialização em Engenharia Naval
∑
∫ ∑ ∫
∫
=
= ⋅
= N
i xy i
N V V i i xy i A z
z A z V
z dV dV
z dV z i
i
1
1
δ δ
onde:
- ( xi ; yi ; zi ) são as coordenadas dos centróides individuais de volume;
- Axyi ; Axzi e Azyi são as áreas das componentes projetadas nos planos XY , XZ e ZY respectivamente;
- δ x (^) i ; δ yi e δ z (^) i são as espessuras das componentes individuais de volume; e,
- N , o número de componentes individuais em que foi dividido o corpo tridimensional.
É importante ressaltar que o centro de gravidade não coincide necessariamente com o centro geométrico do volume ocupado pelo corpo. Isto somente ocorre para corpos maciços e com densidade de massa uniforme.
Especialização em Engenharia Naval
- Calcular o centro geométrico do bloco abaixo.
O bloco é composto por três formas simples: (1), (2) e (3), conforme figura a seguir.
onde:
A 1 (^) = 24 m^2 com ( x 1 ; y 1 ) =( 6 ; 1 ) A 2 (^) = A 3 = 9 m^2 com ( x 2 (^) ; y 2 ) =( 2 ; 3 )e ( x 3 ; y 3 ) =( 10 ; 3 ) Assim; (^33) 1
M y Ai 78 m X (^) i i = (^) ∑ ⋅ = =
3 1
M x Ai 252 m Y (^) i i = (^) ∑ ⋅ = =
e 2
3 1
A A 42 m i i^
= (^) ∑ =
e, portanto,
x
y
(2)
(1)
(3)
5m
2m
12m
6m
Especialização em Engenharia Naval
x = MAY^ = 6 e y = MAX = 1 , 86
Livros de estática e resistência dos materiais fornecem tabelas com o momento estático e o centro geométrico de formas básicas.
2.1.2 Exercícios propostos
- Calcular o centro geométrico da figura abaixo.
Resposta: x =^ b 2 e y =^25 h
- Considere uma barcaça de água doce ( γ ≅ 1000 N / m ) com costados verticais e
com a forma da figura.
Determine as seguintes características desta barcaça e compare com as características de uma barcaça retangular com mesmos comprimentos, boca e calado.
a. deslocamento com um calado de 4,5m;
12m
12m
25m 25m
Y
h
y
x b
( (^) x ; y )
( ) 4
2
2 h^ b
y x bx f x
b/
X
Especialização em Engenharia Naval
2.2 Momento de Inércia
Momento de inércia ( I ) é a propriedade relacionada à inércia de uma massa girando em torno de um eixo, conforme ilustrado na figura abaixo.
Figura 5: Momento de Inércia
Para uma partícula de massa m concentrada no centro de gravidade:
I = m ⋅ r^2 (2.8)
Para uma figura plana, conforme apresentado na Figura 6, os momentos de inércia em relação aos eixos X e Y , são respectivamente:
IX = δ ∫ A y^2 ⋅ dA (2.9)
IY = δ ∫ A x^2 ⋅ dA (2.10)
Figura 6: Momento de inércia de uma figura plana
X
Y dA y
x
Área A
m
r θ
T
T = I ⋅ θ&&
Especialização em Engenharia Naval
Conhecendo-se o momento de inércia para um eixo que passa pelo centróide da área pode-se facilmente obter o momento de inércia para qualquer eixo paralelo este.
Considere os eixos conforme apresentado na figura abaixo.
Figura 7: Teorema do eixo paralelo
Lembrando de (2.9) pode-se escrever:
=∫ ⋅ =∫^ (^ + )^ ⋅ =∫ ⋅ + ∫ ⋅ +∫ ⋅ X (^) A A c A c A c A I y dA y d dA y dA d y dA d dA δ δ δ δ δ
Assim;
I (^) X = IX + 2 d ⋅ MX + d^2 ⋅ A (2.12)
mas, sendo o momento estático em relação a um eixo passando pelo centro geométrico ( M (^) X ) igual a zero:
I (^) X = IX + d^2 ⋅ A (2.13)
X
Y dA
d
x X
Y yc y