


i
Nate Carlos
Ben Cole
John Cook
Jonathan Forest
Sansen Johnson
Ed Massie
Chris Rogers
IARC Team Quadrotor
2008-
2009

















































































Estude fácil! Tem muito documento disponível na Docsity

Ganhe pontos ajudando outros esrudantes ou compre um plano Premium

Prepare-se para as provas
Estude fácil! Tem muito documento disponível na Docsity
Prepare-se para as provas com trabalhos de outros alunos como você, aqui na Docsity
Encontra documentos específicos para os exames da tua universidade
Prepare-se com as videoaulas e exercícios resolvidos criados a partir da grade da sua Universidade
Responda perguntas de provas passadas e avalie sua preparação.
Ganhe pontos para baixar
Ganhe pontos ajudando outros esrudantes ou compre um plano Premium
IARC Team Quadrotor
Tipologia: Notas de estudo
1 / 95

Esta página não é visível na pré-visualização
Não perca as partes importantes!
i
Nate Carlos Ben Cole John Cook Jonathan Forest Sansen Johnson Ed Massie Chris Rogers
1.0 Introduction For 2009, the International Aerial Robotics Competition will be holding its 5 th^ mission since its inception nineteen years ago. Virginia Tech’s Department of Aerospace Engineering created a team of students to compete in this year’s competition. This group paired together with Mechanical Engineering students to comprise the complete Virginia Tech team that hoped to compete in the IARC competition this year. However, due to the difficulty of the design problem presented by this competition, this group will not compete in this year’s IARC competition. The Mechanical Engineering students were responsible for navigation and target acquisition, which includes sensor integration and processing, while the Aerospace Engineering students were responsible for the design selection, creation, and testing of the aerial vehicle that would have been utilized in the competition. This report will cover all portions of the project up to its current state. The team identified four distinct aspects that were vital to successful completion of this year’s mission. The four sub-groups of this year’s IARC team were finance, propulsion, weights/structures, and flight controls. In the following sections, each sub-group will define their unique responsibilities, as well as the progress made in this academic year. This section will cover all aspects of the competition. The competition requires that each team construct a fully autonomous aerial robot that is able to fly and navigate in a confined environment, specifically indoors. Teams are given four flight attempts. Initially, the competition vehicle (CV) will be launched from an area 3 meters away from the building. The CV will then be required to enter the target building through a one (1) square-meter opening. Once inside, the CV will have ten minutes to search, locate, and photograph a target. This information will then be transmitted back to a ground station. Obstacles such as columns, furniture, and interior walls will not be disclosed before the vehicle enters the building; thus, the CV must navigate autonomously. Upon successful completion of the mission, CV is not required to exit the building. The target of interest will be a gauge displaying specific values. The mission is deemed a successful one if the judges are able to read a specific value on the gauge. The gauge will be surrounded by various blinking lights as well as an audible warning tone. The gauge of interest will have one non-blinking blue LED directly below it. It will be necessary for the CV to indicate that it has locked onto the target gauge by means of a JAUS-compatible message as well as a minimum of five seconds of continuous video relayed by a radio frequency. This transmission will need to have enough power to be received at one-hundred meters with a maximum loss of 6
dB. After successfully capturing the picture, the image must be relayed with enough power to be received at one-hundred meters while having a loss of only 6 dB. The receiving antenna can have an aperture no greater than one meter. In addition, the CV will be required to supply information and mission status. These include things such as navigation information, obstacle locations, as well as target location and lock status. JAUS protocol must be utilized during communication with the ground station. The rules below are the main guidelines for the competition as they were written in the published rules [1]:
2.0 Preliminary Design Selection The mission objectives for this year’s competition posed some interesting difficulties. The first challenge is the enclosed environment in which the vehicle will be required to operate. Given that the vehicle will spend most of its time indoors, a conventional fixed wing design did not seem appropriate given the higher forward speed required to maintain enough lift for flight. Additionally, the vehicle will be required to video and photograph a stationary position on a wall, and this favors a platform that has the ability to hover. With this in mind, the team produced a list of possible designs. The initial design concept list is below:
Figure 2: Single Ducted Fan
Figure 3: Single Ducted Fan with Two Fan Sides
Figure 6: Conventional Helicopter
Figure 7: Coaxial Counter-Rotating Main Blade Helicopter
Figure 8: Quad Rotor The team created an initial design criterion, which was established to help determine which design would accomplish the mission goals most effectively. There were six characteristics to this criterion: inherent stability assessment, controllability, useful payload, durability, vehicle gross weight, and maximum linear dimension. For ease and simplicity, a basic grading scale was created to assist the group in identifying which concept would be the best choice for the competition. There were three possible grades and respective point values that could be assigned. The first was a grade of ‘undesirable’ which would earn the concept a score of ‘-1’. The next was a grade of ‘neutral’ which would result in a score of ‘0’. Finally, was the grade of ‘desirable’ with a score of ‘1’. The inherent stability assessment was defined as the difference between dynamic stability and dynamic instability. For this the team analyzed each case for the location of the thrust point in relation to the center of gravity. If the center of gravity was above the thrust point for the vehicle, it was defined to have an unfavorable inherent stability characteristic. An example of this was the Single Ducted Fan. For this initial design, the thrust point was considered to be the directional vanes on the very bottom of the vehicle. Given its weight distribution, the center of gravity it logically located above the thrust point giving it undesirable inherent stability with regard to accomplishing the defined mission.
Table 1: Down Selection Matrix
DESIGN CONCEPT STABILITY CONTROLABILITY PAYLOAD DURABILITY WEIGHT^ GROSS DIMENSION^ MAX TOTAL SINGLE DUCTED FAN -1 -1 -1 1 -1 1 - SIDE DUCTED FAN WITH 2 SIDE FANS -1 0 -1 1 -1 1 - DUAL DUCTED FAN 0 0 -1 1 -1 1 0 LIGHTER THAN AIR 1 1 -1 0 1 -1 1 CONVENTIONA L HELICOPTER 0 -1 0 -1 0 0 - COUNTER- ROTATING MAIN BLADE HELO 0 0 0 -1 0 0 - QUAD ROTOR 1 0 1 1 1 1 5
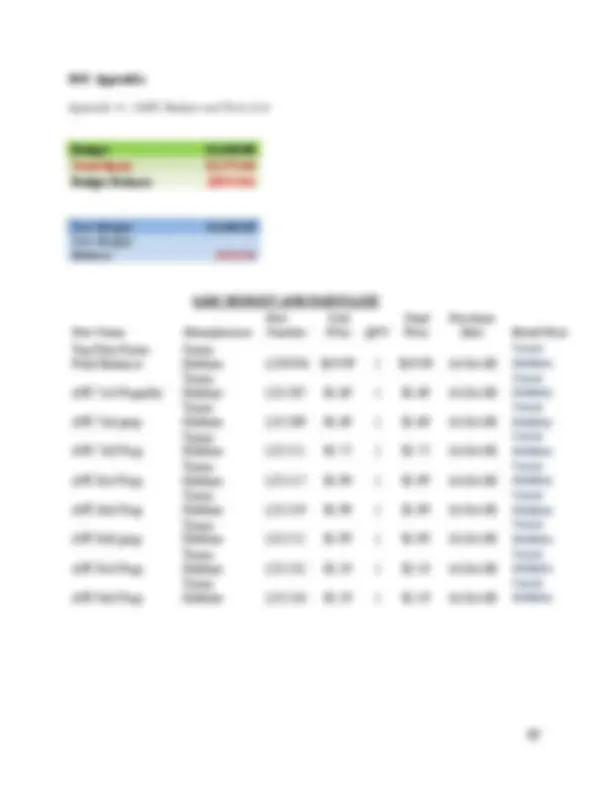
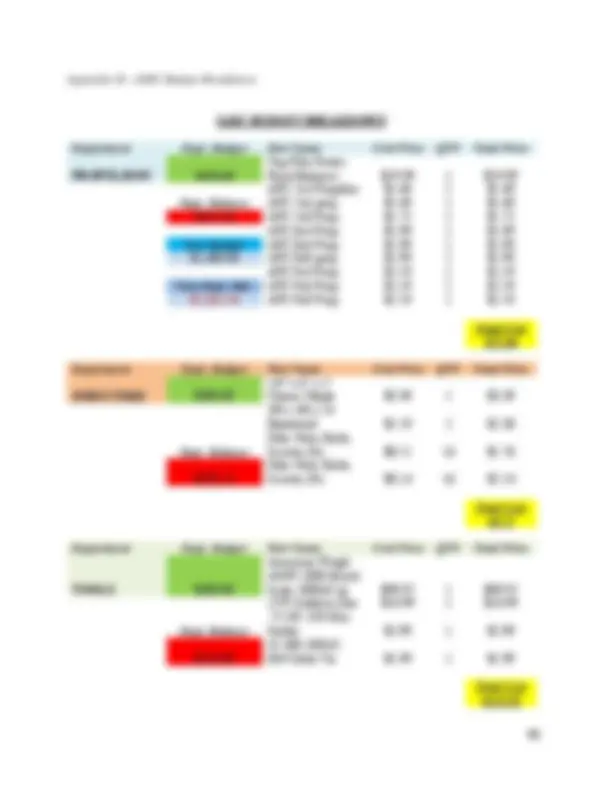
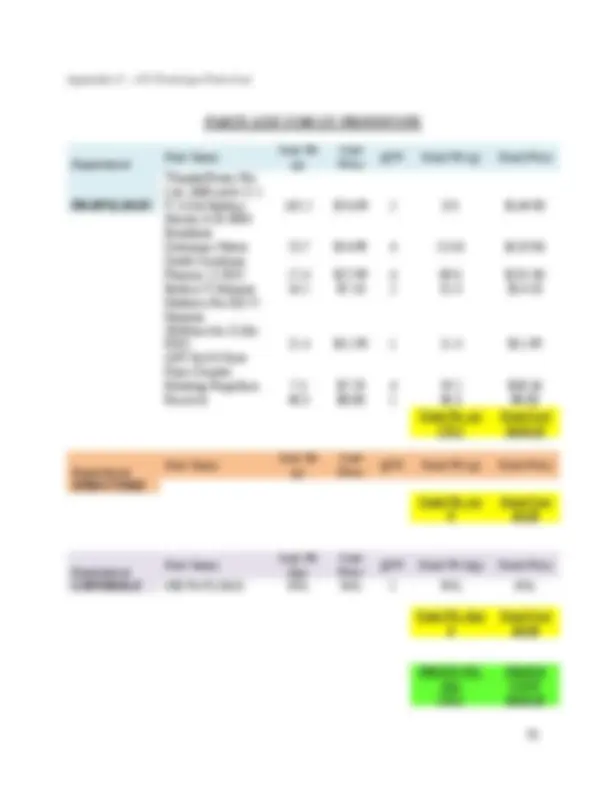
3.0 Finances For the second phase of the project, spending decreased considerably as compared to how it was when the project was first taken. This can simply be attributed to the fact that so much was learned in the development of the first prototype in phase one that development of the second prototype was more focused and purposeful. Less money was spent towards the goal of simply figuring out what works. Spending was also reigned in through the reuse of parts from Proto1 in the development of the new carbon fiber model. Another positive was the increase in financial resources, made possible by a donation of $4000 by the Virginia Center for Autonomous Systems. A record of the team’s financial activity was kept in excel sheets as before. Examples of record keeping can be found in Appendices A, B, and C. Appendix A represents a raw accountability for parts purchased, showing reference information such as part number, date of purchase, retail host, etc. Appendix B represents spending distribution across each discipline within the team, while Appendix C represents a cost analysis of the prototype as constructed.
4.0 Weights and Structures The weights and structures subgroup was assigned with designing the overall structure of the quadrotor and keeping track of the actual and estimated weights. The overall placement and layout of components, as well as stress and deflection analysis were under the responsibility of this subgroup. In order to meet these responsibilities, the weights and structures subgroup researched and analyzed other similar quadrotor designs, analyzed various building materials and worked on building an early prototype test platform. Additionally, tables of actual and estimated weights were kept and updated as the various designs progressed. 4.1 Quadrotor Design To meet the competition mission objectives, several design goals were set. It was decided that the quadrotor design was to have no single dimension greater than 0.8 meters in length so as to allow the vehicle to fit through the required 1 meter by 1 meter window while allowing some room for error. To meet the mission objective of having the vehicle weigh less than 1.5 kg, it was also decided to construct the quadrotor out of as many light weight materials as possible, as well as utilizing a minimal amount of structure to reduce weight and complexity. Passive stability was also of concern. To help maximize stability, it was decided to design the quadrotor in such a way as to keep the center of gravity as low as possible. Finally, the weights and structures subgroup set the goal of keeping the quadrotor design relatively simple to construct and repair. This final constraint was implemented so that as much time as possible could be devoted to testing and improving the vehicle, rather than assembling and fixing it. In the beginning design stages, several comparable quadrotor designs were researched and analyzed. Two of the most influential designs were the BYU Quadrotor[2] and the Draganflyer X Pro[3], as seen in Figure 9.
Figure 9: Design influences. At left BYU Quadrotor design[2], right photo Draganflyer X Pro [3].
though it would incorporate more advanced materials and custom parts as it was intended to be the design used in competition. It was originally intended to have Proto 2 built and ready to test early enough that a second carbon fiber design could be built or updated if needed. Delays in its construction led to only one carbon fiber model being built. 4.1.1 Proto The design of Proto1 can be seen in Figure 10. While not designed to be used in competition, Proto1 was designed to be cheap, quick and easy to build, using mostly over-the- counter structural materials. As such, the main spars were to be made of basswood, the base plate made of maple and the ME team’s sensor payload was to be represented by a wooden box filled with sand. Proto1 was mainly to be used as a proof of concept of several ideas. It was believed that building a simpler design of the quad rotor early in the design process would allow for a better understanding of how many of the parts would fit together, as well as giving ideas on how to improve future designs. Additionally, having a cheap, quick-to-build prototype would allow for other subgroups to test their systems on a quadrotor platform similar in design and weight to what was going to be used in competition. In Figure 10, one can see the overall layout and primary dimensions of Proto1’s design. Most of the components were color coded by function or type for easy recognition. The main structure of the quad rotor was colored in shades of blue and black, and included the base plate, main motor spars, and payload connectors. The propulsion system included the motors and propellers and was colored green, while the batteries, electronic speed controllers and other associated electronic equipment was color coded in shades of orange and red. The ME payload was represented by the large purple box.
Figure 10: Proto1 design as seen in Autodesk Inventor 2009. Dimensions in millimeters.
Figure 11: Proto2 as seen in Autodesk Inventor 2009. All dimensions in millimeters.
The Proto2 used the same color coding system as found in the design of Proto1 in Figure
I x
Bending stress