Baixe Introdução à Mecânica dos Sólidos e outras Notas de estudo em PDF para Engenharia Mecânica, somente na Docsity!
Universidade de Caxias do Sul
Introdução à Mecânica dos Sólidos
Professor Vagner Grison
1. Esforços mecânicos
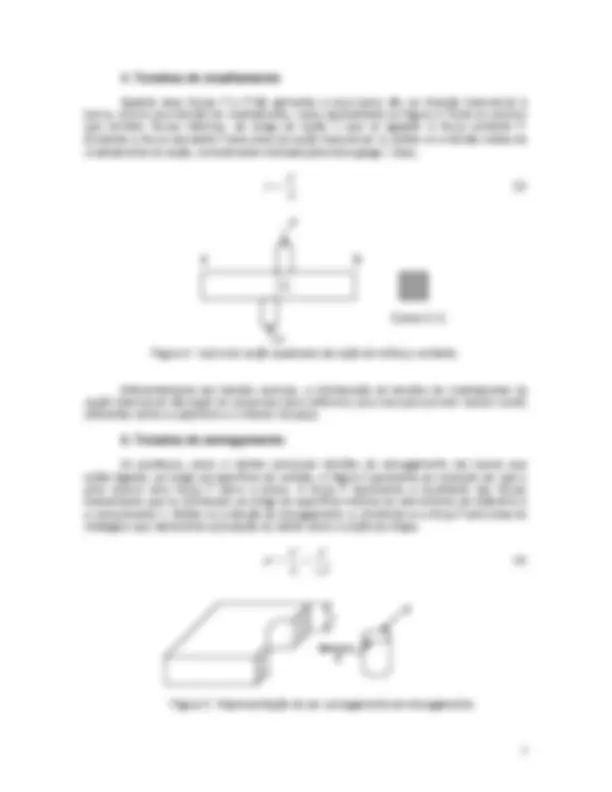
Materiais sólidos tendem a deformar (ou eventualmente romper) quando submetidos a solicitações mecânicas. A Resistência dos Materiais é um ramo da Engenharia que tem como objetivo o estudo do comportamento de elementos construtivos sujeitos a esforços, de forma que eles possam ser adequadamente dimensionados para suportá-los nas condições previstas de utilização. A Figura 1 ilustra formas gráficas simplificadas dos tipos de esforços mais comuns a que são submetidos os elementos construtivos.
Figura 1 – Esquema gráfico simplificado dos principais esforços mecânicos.
(a) Tração : a força atuante tende a provocar um alongamento do elemento na direção da mesma.
(b) Compressão : a força atuante tende a produzir uma redução de tamanho do elemento na direção da mesma.
(c) Flexão : a força atuante provoca uma deformação do eixo perpendicular à mesma.
d) Torção : as forças atuam em um plano perpendicular ao eixo de tal forma que cada seção transversal do objeto sob ação do esforço tende a girar em relação às outras.
(e) Flambagem : é um esforço de compressão em uma barra de seção transversal pequena em relação ao comprimento, que tende a produzir uma curvatura na barra.
(f) Cisalhamento : forças atuantes tendem a produzir um efeito de corte, isto é, um deslocamento linear entre seções transversais.
Em muitas situações práticas ocorre uma combinação de dois ou mais tipos de esforços. Em alguns casos há um tipo predominante e os demais podem ser desprezados, mas há outros casos em que eles precisam ser considerados conjuntamente.
2. Tensões
A força por unidade de área ou a intensidade das forças distribuídas numa certa seção transversal é chamada tensão atuante, nesta seção, e é indicada pela letra grega σ (sigma). Assim, a tensão em uma barra de seção transversal A , sujeita a uma força axial F , conforme a figura 2, é obtida dividindo-se o módulo F da força pela área A.
A unidade de tensão tem a mesma dimensão da pressão mecânica, assim, no Sistema Internacional, a unidade básica é o pascal (Pa) e no Sistema Inglês é o (psi). Por convenção, esforços de tração geram tensões positivas, enquanto esforços de compressão geram tensões negativas.
A
σ =^ F (3)
Figura 2 – Barra sob ação de um esforço de tração. Exemplo: Supondo que a barra da figura 2, está carregada axialmente por uma força F de intensidade igual a 20 kN e possui um diâmetro igual a 15 mm. Qual é a tensão resultante?
3. Tensões Normais
É importante notar que a determinação da tensão de uma determinada seção dividindo-se a força aplicada pela sua área nos fornece um valor médio das tensões. Para definir a tensão em um dado ponto Q da seção transversal, devemos considerar uma pequena área ∆ A , conforme ilustrado na figura 3.
Figura 3 – Tensão no ponto Q. Dividindo-se a intensidade de ∆ F por ∆ A , obtém-se o valor médio da tensão em ∆ A. Fazendo, então, ∆ A tender a zero, obtém-se a tensão no ponto Q.
A
F
A ∆
σ ∆ lim → 0 (1)
Da equação 1 deduzimos que a intensidade da resultante das forças internas distribuidas é dada pela equação 2.
A
dF σ. dA (2)
F P’
σ = F/A
F
F’ Q ∆F
∆A
6. Tensões em um plano oblíquo ao eixo
Quando se consideram planos que não são perpendiculares ao eixo da peça pode-se verificar que forças axiais podem gerar, ao mesmo tempo, tensões normais e de cisalhamento, como ilustrado na figura 6.
Figura 6 – Decomposição de forças em um plano oblíquo ao eixo. Uma vez que o plano forma um ângulo θ com o plano normal, a força P deve ser decomposta em suas componentes normal F e tangencial V.
F = P.cos θ V = P.sen θ (5) Com isso é possível calcular as tensões normais à seção devido à componente F e as tensões de cisalhamento devido à componente V , em relação à área A θ.
θ
σ
A
= F
θ
τ
A
= V (6)
Chamando de Ao a área da seção normal ao eixo, temos que Ao=A θ .cos θ. Assim, substituindo a equação 5 na 6 chegamos à seguinte expressão.
σ. cos^2 θ
A o
= P τ .cosθ.sin θ
A o
= P (7)
Assim, pode-se observar que a máxima tensão normal ocorre para θ =0 e é nula para θ =90° e a tensão de cisalhamento é máxima quando θ =45° e é nula quando θ =0 e θ =90°.
7. Componentes de tensões
Na prática, a maior parte das peças de estruturas e componentes de máquinas se encontra sob ação de carregamentos mais complexos. Assim, analisando um corpo sob ação de várias forças pode-se estudar as condições de tensões de um certo ponto Q no interior do corpo, como apresentado na figura 7, o qual também deve satisfazer às equações 8 e 9.
Σ Fx = 0 Σ Fy = 0 Σ Fz = 0 (8) Σ Mx = 0 Σ My = 0 Σ Mz = 0 (9)
P’ P P
F
V
θ
Ao
Aθ
Figura 7 – Componente de tensões.
8. Coeficiente de Segurança
Dentro das aplicações de engenharia, a determinação de tensões não é o objetivo final, mas um passo necessário na análise e projeto estrutural. Para isso, é necessário ter o conhecimento de como o material a ser utilizado se comporta sob ação de carregamentos conhecidos. Estas informações podem ser obtidas de maneira experimental através da aplicação de cargas controladas em amostras do material de interesse. Um componente estrutural deve ser projetado de tal forma que o carregamento máximo por ele suportado seja consideravelmente maior que o carregamento, sob o qual este componente estará sujeito em condições normais de utilização. Este carregamento menor é chamado de carregamento admissível ou carga de projeto. A relação entre o carregamento último e o carregamento admissível é chamada de coeficiente de segurança e pode ser expresso pela equação 10.
CS = carregamento último / carregamento admissível (10) Em muitos casos existe uma corresondência linear entre a carga aplicada e a tensão provocada pela carga. Assim o coeficiente de segurança também pode ser expresso conforme a equação 11.
CS = tensão última / tensão admissível (11) Na maioria das aplicações, os coeficientes de segurança são definidos por especificações de projeto e normas escritas por comitês de normalização de nível internacional. Além disso, a escolha do coeficiente de segurança adequado para as diferentes aplicações práticas requer uma análise cuidadosa, que leve em consideração muitos fatores, como, por exemplo:
- Modificações que ocorrem nas propriedades mecânicas do material.
- Frequência com que a carga é aplicada ao longo da vida do componente.
- Possíveis alterações futuras no tipo de carregamento aplicado.
- Modo de ruptura que pode ocorrer.
- Precisão dos métodos utilizados e análises realizadas.
- Deterioração futura devido à falta de manutenção.
- A importância do componente para a integridade da estrutura.
τyz τzy
τxy
τzx^ τxz
τyx
σy
σx
σz
y
x
z
desenhadas a uma distância Lo. O corpo de prova é, então instalado na máquina de teste que aplica uma carga de tração P crescente à amostra. À medida que aumenta o valor de P , a distância L entre as duas marcas também aumenta. Assim, são registradas as alterações dos valores de L , P e em alguns casos o diâmetro da seção transversal do corpo de prova. Para cada par de valores lidos de P e δ = L – Lo , calcula-se a tensão dividindo-se a força aplicada pela área da seção transversal inicial Ao do corpo de prova. Calcula-se também a deformação específica ε dividindo-se o alongameto δ pelo comprimento inicial Lo entre as duas marcas. Os diagramas gerados a partir deste procedimento estão ilustrados na figura 9. Materiais dúcteis , que compreendem o aço estrutural e outros metais, se caracterizam por apresentarem escoamento a temperaturas normais. O corpo de prova é submetido a um carregamento crescente, e seu comprimento aumenta, de início, lentamente, sempre proporcional ao carregamento. Desse modo, a parte inicial do diagrama tensão-deformação é uma linha reta com grande coeficiente angular. Entretanto, quando é atingido um valor crítico de tensão σ e , o corpo de prova sofre uma longa deformação, com pouco aumento da carga aplicada. Essa deformação é causada por deslizamento relativo de camadas do material de superfícies oblíquas. Quando o carregamento atinge um certo valor máximo, o diâmetro do corpo começa a diminuir, devido à perda de resistência local. Esse fenômeno é conhecido como estricção. Após ter começado a estricção, um carregamento mais baixo é suficiente para manter o corpo de prova se deformando até que ocorra a sua ruptura. Assim, a tensão σ u correspondente à máxima carga aplicada ao material é conhecida como tensão última e a tensão σ r correspondente ao ponto de ruptura é chamada tensão de ruptura. Materiais frágeis , como ferro fundido e vidro são caracterizados por uma ruptura que ocorre sem nenhuma mudança sensível no modo de deformação do material. Assim, nestes casos não existe diferença entre tensão última e tensão de ruptura. Sua deformação até a ruptura é muito menor do que a dos materiais dúcteis, além de não apresentar o fenômeno de estricção antes do rompimento. Materiais frágeis também não apresentam caracterizado o trecho horizontal que definiria a sua tensão de escoamento. Materiais que não apresentam um patamar bem definido de tensão de escoamento tem este valor definido a partir de um método específico para a obtenção da tensão de escoamento convencional. Ela é obtida tomando-se no eixo das abscissas a deformação específica ε = 0,2% (ou 0,002), e por esse ponto, traçando-se uma reta paralela ao trecho linear inicial do diagrama. Assim, a tensão de escoamento corresponde ao ponto de intersecção dessa reta com a curva do diagrama.
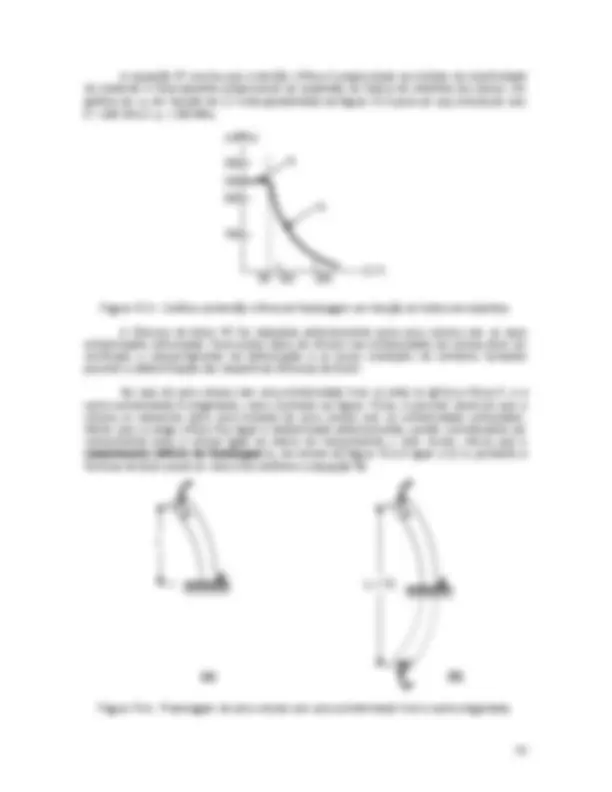
Figura 9 – Diagramas tensão-deformação.
9.3 Lei de Hooke – Módulo de Elasticidade
As estruturas correntes são projetadas de modo a sofrerem apenas pequenas deformações, que não ultrapassem os valores do diagrama tensão-deformação correspondentes ao trecho reto inicial. Neste trecho a tensão é diretamente proporcional a deformação específica, como está expresso pela equação 13:
σ = E. ε (13)
Esta relação é conhecida como Lei de Hooke e se deve ao matemático inglês Robert Hooke (1635-1703). O coeficiente E é chamado de módulo de elasticidade ou módulo de Young (cientista inglês, 1773-1829). Como a deformação específica é uma grandeza adimensional, o módulo E é expresso na mesma unidade de σ, Pascal no Sistema Internacional ou psi no Sistema Inglês de unidades.
Algumas propriedades físicas dos materiais estruturais, como resistência, ductibilidade, resistência à corrosão, entre outros, podem ser modificadas por tratamentos térmicos, pela presença de ligas metálicas ou pelo próprio processo utilizado na sua manufatura. Isto não ocorre para o Módulo de Elasticidade. Uma característica importante dos materiais diz respeito à invariabilidade do seu Módulo de Elasticidade. A figura 10 apresenta o diagrama tensão-deformação do ferro puro e de outros três tipos de aço, os quais diferem em suas tensões de escoamento, tensões máximas e deformação específica máxima, porém, na região elástica possuem a mesma taxa de deformação em função da tensão.
Escoamento Recuperação Estricção
0,0012 0,02 0,2 0,
Ruptura
σr
420 MPa σmáx
250 MPa σe
(a) Aço com baixo teor de carbono (dúctil)
ε
1500 MPa σr=σmáx Ruptura
(b) Aço temperado (frágil)
ε
9.5 Deformações de Barras Sujeitas a Cargas Axiais
Uma barra homogênea de comprimento L e seção transversal uniforme de área A sujeita à força axial centrada P , como apresentada na figura 8, cujo limite de elasticidade não é ultrapassado, pode-se utilizar a equação 13 para determinar a sua deformação específica. Assim, substituindo a equação 13 na equação 12 obtém-se a expressão 14.
A E
L P^ L
E ⋅
δ =^ σ ⋅ =^ ⋅ (14)
A equação 14 é válida para barras homogêneas com seção transversal uniforme e com carga aplicada nas extremidades. Se as forças são aplicadas em outros pontos e / ou a barra consiste de várias partes com diferentes seções transversais, ou composta de diferentes materiais, é necessário dividi-la em segmentos que satisfaçam individualmente as condições de aplicação da equação 14. Neste caso a expressão fica conforme a equação 15.
i (^) i i
i i
A E
δ P L (15)
9.6 Problemas Estaticamente Indeterminados
Em muitos problemas de engenharia as forças internas não podem ser determinadas apenas com os recursos da estática. Na maior parte desses problemas, as próprias reações, que são forças externas, não podem ser determinadas simplesmente desenhando o diagrama de corpo livre da peça e estudando suas equações de equilíbrio. Essas equações devem ser complementadas por outras relações envolvendo deformações, que podem ser obtidas considerando as condições geométricas do problema. Tais problemas são conhecidos como estaticamente indeterminados, pois a estática não é suficiente para determinar as reações e esforços internos.
Exemplo: Uma barra de comprimento L e área da seção transversal A 1 , com módulo de elasticidade E 1 , foi colocada dentro de um tubo de mesmo comprimento, mas área de seção transversal A 2 e módulo de elasticidade E 2. Qual é a deformação da barra e do tubo, quando uma força axial P é aplicada por meio de uma placa Rígida? Chamando de P 1 e P 2 , respectivamente, as forças axiais na barra e no tubo, são desenhados os diagramas de corpo livre dos três elementos.
Figura 12 – Exemplo de problema estaticamente indeterminado.
Desta análise é possível chegar a algumas conclusões, tais como:
P 1 + P 2 = P (16)
δ 1 = δ 2 (17)
Da equação 17 obtemos a expressão 18.
2 2
2 1 1
1
. A. E
P
A E
P = (18)
Substituindo a equação 16 na 18, então obtemos os seguintes resultados.
1 1 2 2 1 1 1
A E A E
P A E P
1 1 2 2 2 2 2
A E A E
P A E P
Com isso, é possível determinar as forças P 1 e P 2 e, na seqüência as deformações.
Barra (A^ P 1 , E 1 )
Tubo (A 2 , E 2 )
L Placa Rígida
P 2 P 2 ’ P 1 P 1 ’
P
P 1
P 2
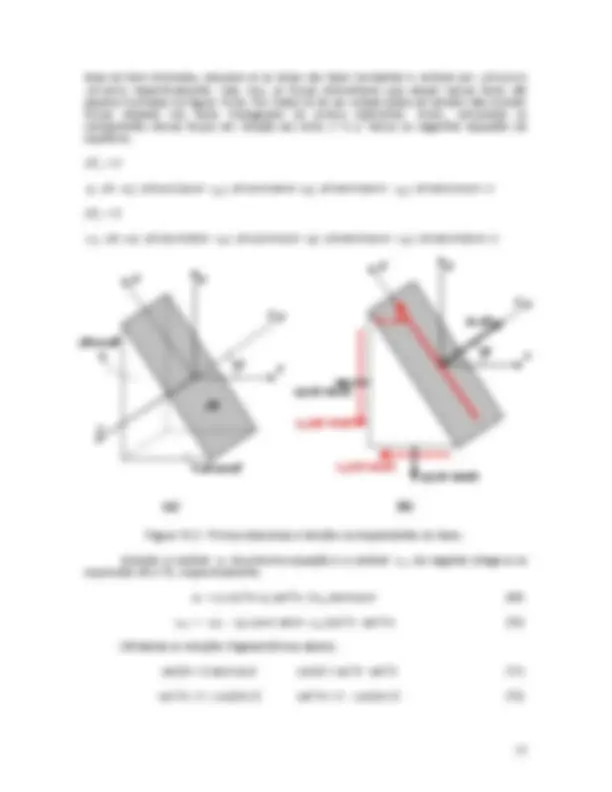
Com isso, substituindo a equação 22 na equação 13 obtemos as relações que descrevem totalmente as condições de deformações específicas sob carga axial paralela ao eixo x.
E
ε (^) x = σ^ x
E
ε (^) y = ε z =−ν⋅^ σ^ x (23)
9.9 Estados Múltiplos de Carregamento – Generalização da Lei de Hooke
Ao considerar elementos estruturais sujeitos à ação de carregamentos que atuam nas direções dos três eixos coordenados será possível verificar tensões σ x , σ y e σ z , todas diferentes de zero, o que caracteriza o estado múltiplo de carregamento ou carregamento multiaxial. Considerando um cubo elementar sob ação de carregamento multiaxial, em que se adota para suas dimensões arestas de comprimento unitário. Ocorrerão, neste caso, deformações que o tornarão um paralelepípedo retângulo com lados 1+ ε x , 1+ ε y e 1+ ε z.
Figura 14 – Elemento sob carregamento multiaxial e deformações.
Para escrever as expressões das componentes de deformação em função das componentes de tensão deve-se considerar separadamente o efeito provocado por cada componente de tensão e superpor os resultados. Este método é conhecido como princípio da superposição, que afirma que o efeito provocado em uma estrutura por determinado carregamento combinado pode ser obtido determinando-se separadamente os efeitos dos vários carregamentos e combinando-se os resultados obtidos. Duas condições devem ser respeitadas na aplicação deste princípio: 1- Cada efeito é diretamente proporcional à carga que o produziu. 2- Deformação causada é pequena e não afeta as condições de aplicação das demais. Com base nas equações 23 e utilizando o princípio da superposição para cada carregamento obtêm-se as expressões 24 que exprimem a generalização da Lei de Hooke para carregamentos multiaxiais.
y z x
1
1
1
σy
σz
σx
1+εx
1+εy
1+εz
E E E
ε (^) x =+^ σ x −^ ν^ ⋅^ σ y −ν⋅^ σ^ z
E E E
ε (^) y = −ν ⋅^ σ x +^ σ y −ν ⋅^ σ^ z (24)
E E E
ε (^) z =−ν⋅^ σ x −^ ν^ ⋅^ σ y +^ σ^ z
9.10 Deformação de Cisalhamento
As equações 24 foram deduzidas assumindo-se que não havia tensões de cisalhamento envolvidas. De qualquer forma, as tensões de cisalhamento não têm nenhum efeito direto nas deformações específicas, e enquanto as deformações permanecerem pequenas, não vão influenciar a dedução nem a validade das equações 24. As tensões de cisalhamento tenderão a deformar o cubo elementar em um paralelepípedo oblíquo. Considera-se inicialmente um cubo elementar de lado unitário, sujeito apenas às tensões de cisalhamento τ xy e τ yx. O elemento se deforma assumindo a forma de um rombóide de lado unitário. Dois dos ângulos formados pelas quatro faces do cubo que estão sob tensão se reduzem do valor de π/2 para π/2 – γ xy , enquanto os outros dois aumentam para o valor de π/2 + γ xy , como ilustrado na figura 15.
Figura 15 – Elemento sob ação de tensões de cisalhamento.
O pequeno ângulo γ xy (expresso em radianos) define a distorção do cubo e é chamado de deformação de cisalhamento correspondente às direções x e y. Quando a deformação provoca uma redução no ângulo formado pelas faces orientadas segundo os eixos x e y , respectivamente, a deformação é convencionada positiva. Marcando em um gráfico os valores τ xy e os valores correspondentes de γ xy , obtém-se o diagrama tensão-deformação de cisalhamento do material em questão. Isso pode ser
y z x
1
1
1
τyx
τxy π/2−γxy
π/2+γxy
tan
m
m γ
γ β
Além disso, da figura 16 pode-se determinar a equação 28.
x
x ε
β ν ε
tan 1 (28)
Igualando as equações 27 e 28, considerando que ε x << 1 se obtém a equação 29.
γ m = (1 + ν). ε x (29)
Esta é a relação entre a deformação de cisalhamento máxima γ m e a deformação específica axial ε x.
Para obter uma relação entre as constantes E , ν e G , temos que, segundo a Lei de Hooke, γ m = τ m / G e ε x = σ x / E , e assim, pode-se reescrever a equação 29.
τ m/G = (1 + ν). σ x/E (30)
Assim, resolvendo para G e considerando que σ x = P/A e que τ m = P/2A , temos, então que σ m = 2. τ m , e podemos escrever a equação 31 que exprime o módulo de elasticidade transversal G em função do módulo de elasticidade E e do coeficiente de Poisson ν.
⋅ ( + ν)
G E (31)
9.12 Princípio de Saint-Venant
Quando é aplicado um carregamento uniformemente distribuído em uma barra de seção transversal uniforme obtém-se uma tensão e uma deformação também uniformes de acordo com a relação σ = E. ε. Quando há a aplicação de um carregamento concentrado, bem no centro da seção transversal de uma barra, por exemplo, ocorrem grandes valores de tensões e deformações nas vizinhanças do ponto de aplicação da força e quase nenhum nas bordas da extremidade da barra. À medida que são analisados elementos mais afastados das
extremidades da barra percebe-se uma equalização das deformações, conduzindo a uma distribuição mais uniforme de tensões e deformações específicas ao longo da seção transversal. Nestas regiões mais afastadas das extremidades da barra pode-se assumir, então que a tensão média é definida por σ = P/A. Em outras palavras, com exceção dos pontos na vizinhança do ponto de aplicação da força, a distribuição de tensões pode ser adotada independentemente do modo como se aplica o carregamento. Este resultado, que não se aplica somente a carregamento axial, mas a qualquer tipo de carregamento, é conhecido como princípio de Saint-Venant. O princípio de Saint-Venant torna possível substituir um certo carregamento por outro mais simples, por ocasião de calcular as tensões em uma determinada peça. Dois pontos importantes, entretanto devem ser obedecidos na sua aplicação:
1- O carregamento real e o carregamento usado na determinação das tensões devem ser estaticamente equivalentes;
2- A determinação das tensões nas proximidades dos pontos de aplicação das forças deve ser realizada por meio de métodos matemáticos avançados ou métodos experimentais.
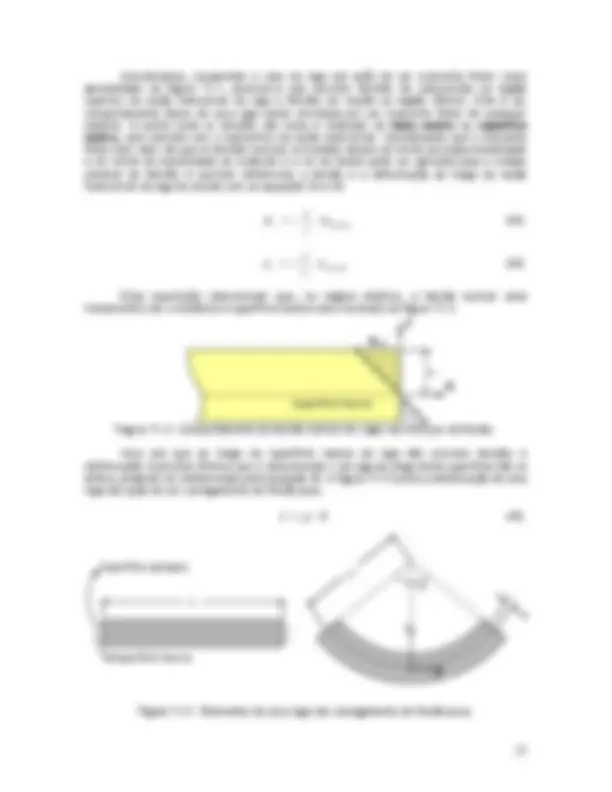
Figura 10.2 – Seção transversal infinitesimal sob esforço de torção.
A observação prática demonstra que o ângulo de distorção γ de uma superfície elementar varia linearmente com o raio, atingindo o valor máximo γmax na borda, conforme a equação 32.
γ = ( r / R ) γmax (32)
Considerando que as deformações ocorrem dentro do limite de proporcionalidade e os ângulos são proporcionais aos raios, as tensões de cisalhamento τ também serão. A figura 10.3 ilustra a distribuição de tensões ao longo de uma seção transversal circular.
τ = ( r / R ) τmax (33)
Figura 10.3 – Distribuição das tensões de cisalhamento devido à torção.
O torque T pode ser obtido pela integração do produto das forças elementares d F devido ao cisalhamento pela distância (raio) até o centro O , conforme a equação 34.
T = ∫ r d F (34)
Uma vez que d F = τ d A , onde dA são as áreas elementares, substituindo na equação 34 pode-se escrever a 35.
T = ∫ r τ d A (35)
Assim, substituindo τ da equação 35 de acordo com a igualdade 33.
T = ∫ r ( r/R ) τmax d A = ( τmax / R ) ∫ r^2 d A (36)
A integral no segundo membro da expressão, ∫ r^2 d A , representa o momento polar de inércia J da seção transversal em relação ao seu centro O. Desta forma fica definida a relação entre torque e tensão máxima conforme as equações 37 e 38.
R
T = τ^ max⋅^ J (37)
J
= T^ ⋅^ R
τ (^) max (38)
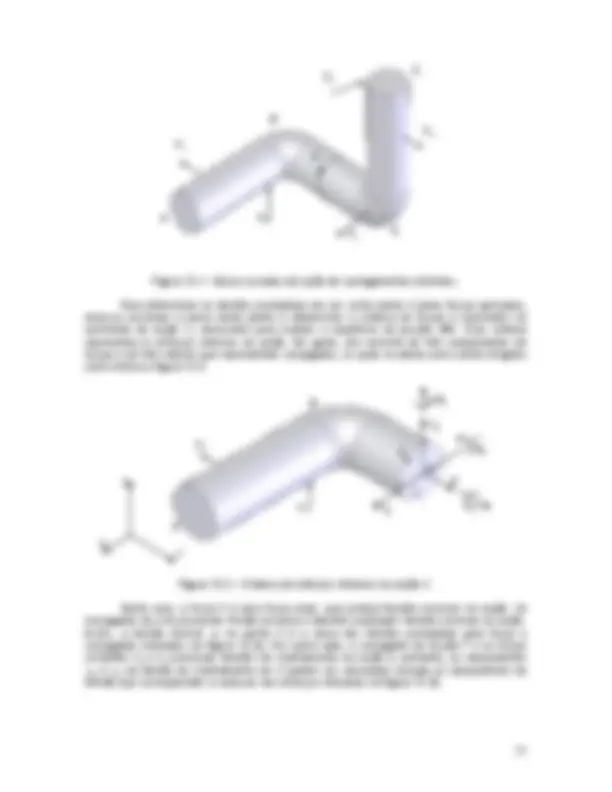
Outro aspecto que vale mencionar é o fato das tensões de cisalhamento ocorrerem sempre em pares perpendiculares. Assim, em um corte hipotético de um eixo cilíndrico conforme Figura 10.4, há tensões ao longo do eixo, de mesmos valores das tensões na seção transversal.
Figura 10.4 – Pares de tensão de cisalhamento em um eixo circular sob torção.
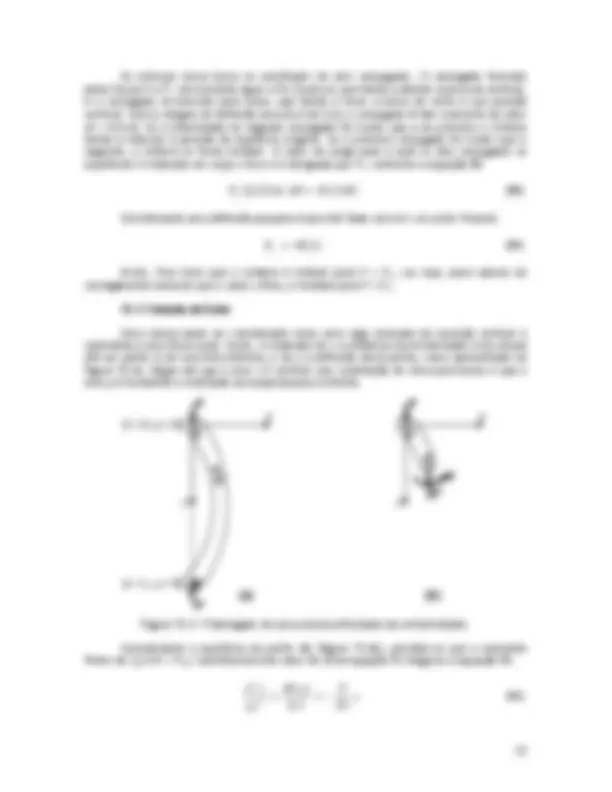
10.2 Ângulo de torção Tomando um eixo circular de comprimento L e raio R , torcido em um ângulo de torção φ, marca-se na sua superfície um elemento de área formado por dois círculos adjacentes e duas geratrizes muito próximas. Antes da atuação de qualquer esforço, o elemento se apresenta como indicado na figura 10.5 a. Após a aplicação de um momento torçor o elemento se transforma em um losango de acordo com a figura 10.5 b. Neste caso, dois lados do elemento são formados por círculos, que permanecem inalterados. Assim, a deformação de cisalhamento γ deve ser igual ao ângulo formado pelas linhas AB e A’B. A figura 10.5 b mostra que quando γ é pequeno, pode-se expressar o comprimento do arco AA’ por AA’=L. γ. Ao mesmo tempo, na seção transversal extrema temos que AA’=R. φ. Desta forma, igualando se obtém a equação 39.
L
γ =^ R ⋅^ φ max (39)