
Prepare-se para as provas
Estude fácil! Tem muito documento disponível na Docsity

Ganhe pontos para baixar
Ganhe pontos ajudando outros esrudantes ou compre um plano Premium

Guias e Dicas


Prepare-se para as provas
Estude fácil! Tem muito documento disponível na Docsity
Encontrar documentos
Prepare-se para as provas com trabalhos de outros alunos como você, aqui na Docsity
Encontra documentos específicos para os exames da tua universidade
Encontra documentos específicos para os exames da tua universidade
Videoaulas
Prepare-se com as videoaulas e exercícios resolvidos criados a partir da grade da sua Universidade
Quiz
Responda perguntas de provas passadas e avalie sua preparação.
Ganhe pontos para baixar
Ganhe pontos ajudando outros esrudantes ou compre um plano Premium
Material Sobre Robótica de Robos Aereos
Tipologia: Notas de aula
2019

1 / 22

Esta página não é visível na pré-visualização
Não perca as partes importantes!












Documentos relacionados
Pré-visualização parcial do texto
Baixe Introdução Robos Aéreos e outras Notas de aula em PDF para Robótica, somente na Docsity!
Princípios de Robótica
Robôs Aéreos
Prof. Anderson Sachetto Rosa
[email protected]
VANTs
VANTs
- Schiebel’s S-
VANTs
Isso acontece devido à
- Capacidade de decolar e aterrissar verticalmente
- Realizar tarefas de voo pairado alterando a orientação de guinada
- Se mover longitudinalmente ou lateralmente enquanto mantém uma mesma cota vertical
- Alterar completamente a direção de vou, ou deter-se rapidamente.
VANTs
A flexibilidade de manobras, obtidas com a utilização de asas rotativas, gera maior complexidade no controle destas máquinas. Helicópteros e quadrimotores se caracterizam como sistemas inerentemente instáveis, multivariáveis, com dinâmica complexa e altamente acoplada.
Sensores
Inclinômetro: é um sensor unidirecional capaz de medir o ângulo de inclinação do veículo no qual está montado, em relação ao vetor gravidade. Altímetro: Instrumento utilizado para medir a altitude do veículo em relação a um nível fixo. (Pressão estática do ar, ultrassom e laser).
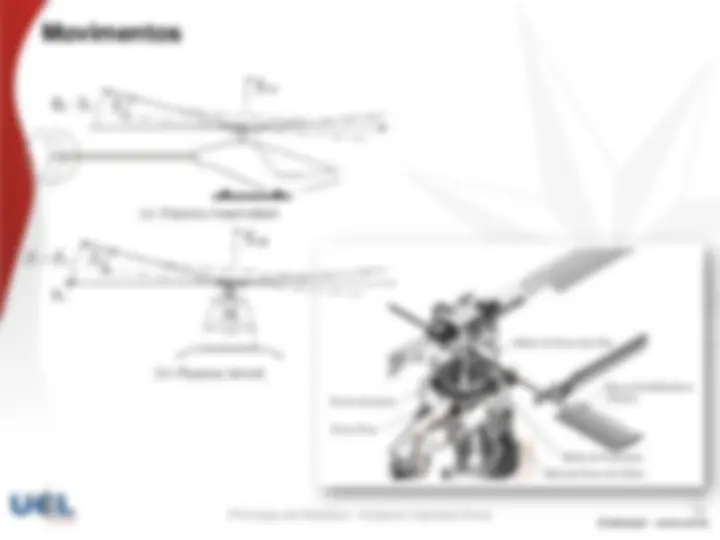
Movimentos
O movimento de inclinação ou arfagem é uma rotação sobre o eixo que passa pelas asas.
Movimentos
A manobra de guinada é uma rotação sobre o eixo vertical intrínseco.
Movimentos
Modelagem de VANTs
Modelo de Newton-Euler, representação em variáveis de estado Modelo de Euler-Lagrange
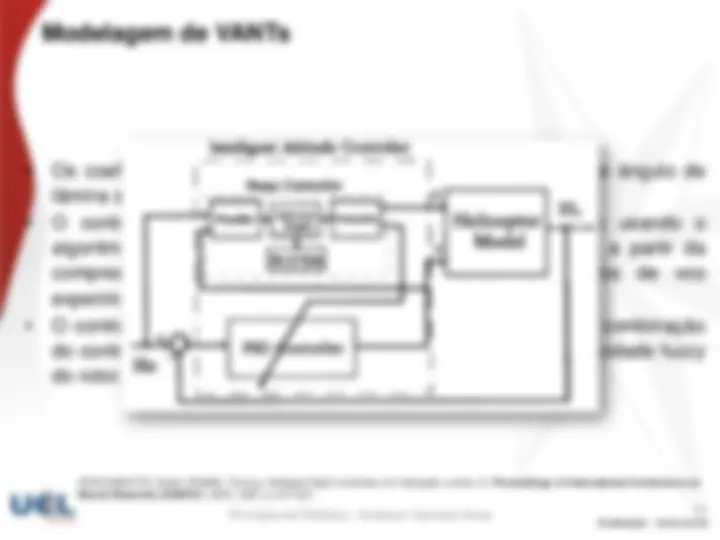
Modelagem de VANTs
Zein-Sabatto e Zheng, utilizam uma plataforma experimental para obter dados de voo de um helicóptero, os dados são então utilizados para a identificação do modelo utilizando Redes Neurais Artificiais. ZEIN-SABATTO, Saleh; ZHENG, Yixiong. Intelligent flight controllers for helicopter control. In: Proceedings of International Conference on Neural Networks (ICNN'97). IEEE, 1997. p. 617-621.
Modelagem de VANTs
- Os coeficientes de um controlador PID usado para controle de ângulo de lâmina são pesquisados usando algoritmos genéticos.
- O controlador de velocidade do rotor principal é projetado usando o algoritmo de lógica Fuzzy baseado no conhecimento gerado a partir da compreensão da teoria aerodinâmica e análise dos dados de voo experimental do helicóptero.
- O controlador de voo de helicóptero inteligente é formado pela combinação do controlador PID de ângulo da lâmina e o controlador de velocidade fuzzy do rotor. ZEIN-SABATTO, Saleh; ZHENG, Yixiong. Intelligent flight controllers for helicopter control. In: Proceedings of International Conference on Neural Networks (ICNN'97). IEEE, 1997. p. 617-621.
Modelagem de VANTs
Hashimoto et al. utilizaram um técnicas de modelagem de sistemas (ARX, ARMAX e Output-Error ) para estimar o modelo dinâmico do robô. O modelo que minimizou a função custo foi um de 23 ª com dois delays. HASHIMOTO, Seiji et al. Robust control design based on identified model for autonomous flight system of an unmanned helicopter. In: IECON'01. 27th Annual Conference of the IEEE Industrial Electronics Society (Cat. No. 37243). IEEE, 2001. p. 323-328.